Download as pdf or txt
You might also like
- Magnetic Models of Saturated Interior Permanent Magnet Motors Based On FEADocument8 pagesMagnetic Models of Saturated Interior Permanent Magnet Motors Based On FEAomokhafeNo ratings yet
- Zero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Document6 pagesZero Speed Sensorless Position Detection For Permanent Magnet Synchronous Machines, 2005.Ali H. NumanNo ratings yet
- IPMSM Inductances Calculation Using FEADocument5 pagesIPMSM Inductances Calculation Using FEABooNo ratings yet
- Modeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitDocument8 pagesModeling For The Design of Fractional Slot PM Machines With Concentrated Windings Protected From Demagnetization During Three-Phase Short CircuitFaiza OuiddirNo ratings yet
- Dynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationDocument7 pagesDynamic Design and Simulation Analysis of Permanent Magnet Motor in Different Scenario of Fed AlimentationjobNo ratings yet
- Modeling Methods of Three Phase Induction Motor: Geetanjali Manekar and Sanjay B. Bodkhe, PH.DDocument5 pagesModeling Methods of Three Phase Induction Motor: Geetanjali Manekar and Sanjay B. Bodkhe, PH.DKevin Lucas MarcilloNo ratings yet
- Parameters - and - Perfomance of A High Field Permanente MagnetDocument8 pagesParameters - and - Perfomance of A High Field Permanente MagnetaugustoNo ratings yet
- Modeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor DriveDocument6 pagesModeling, Simulation, and Analysis of Permanent-Magnet Motor Drives, The Brushless DC Motor Drivekishan kharelNo ratings yet
- Nonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorDocument6 pagesNonlinear Mathematical Modeling and Simulation of Switched Reluctance MotorAkshay ArksaliNo ratings yet
- Wt&Ions: Multiple Reference Frame Analysis of Non-Sinusoidal Drives S.D.SudhoeDocument7 pagesWt&Ions: Multiple Reference Frame Analysis of Non-Sinusoidal Drives S.D.SudhoemssmsNo ratings yet
- Omparative Performance Analysis of Field Oriented Control and Direct Torque Control For A Fractional-Slot Concentrated Winding Interior Permanent Magnet Synchronous MachineDocument7 pagesOmparative Performance Analysis of Field Oriented Control and Direct Torque Control For A Fractional-Slot Concentrated Winding Interior Permanent Magnet Synchronous MachineuossifNo ratings yet
- 12 Tie 0965 R2Document12 pages12 Tie 0965 R2ZahraaRaz 1996No ratings yet
- Algorithmic Method of Design and Analysis of Fractional Slot Windinf of AC Machine CO-UV-0000313 - 01 PDFDocument8 pagesAlgorithmic Method of Design and Analysis of Fractional Slot Windinf of AC Machine CO-UV-0000313 - 01 PDFxxNo ratings yet
- 67-SUBMISSION - Manuscript File (.PDF - .Docx) - 778-1-10-20210421Document9 pages67-SUBMISSION - Manuscript File (.PDF - .Docx) - 778-1-10-20210421sunnythree16No ratings yet
- High Performance Line Start Permanent MagnetDocument6 pagesHigh Performance Line Start Permanent MagnetQuang HoàngNo ratings yet
- Axial-Field Electrical MachinesDesign and ApplicationsDocument2 pagesAxial-Field Electrical MachinesDesign and ApplicationsaugustoNo ratings yet
- Performance Analysis of Single Phase Line Start PM Synchronous MotorDocument10 pagesPerformance Analysis of Single Phase Line Start PM Synchronous MotorpramoddsaNo ratings yet
- Unbalanced Magnetic ForcesDocument10 pagesUnbalanced Magnetic Forcesrakeshee2007No ratings yet
- Wevj 05 00533Document8 pagesWevj 05 00533Ashutosh SahuNo ratings yet
- Magnetic Equivalent Circuit and Finite Element ModDocument12 pagesMagnetic Equivalent Circuit and Finite Element Modسليم درباشيNo ratings yet
- Modified Field Oriented Control For SmoothDocument6 pagesModified Field Oriented Control For SmoothJosé ArrascaitaNo ratings yet
- IECON22 Standstill Flux EstimationDocument6 pagesIECON22 Standstill Flux EstimationvawihNo ratings yet
- A Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque PerformanceDocument4 pagesA Novel Dual-Rotor, Axial Field, Fault-Tolerant Flux-Switching Permanent Magnet Machine With High-Torque Performancejunaid ikramNo ratings yet
- A Novel Torque Quality Improvement of An Asymemetric Windings Permanent MagnetDocument6 pagesA Novel Torque Quality Improvement of An Asymemetric Windings Permanent MagnetLEONEL JORDY PEREZ SOLORZANONo ratings yet
- Estimation of Back Emf For PMSM at Low Speed RangeDocument6 pagesEstimation of Back Emf For PMSM at Low Speed Rangeyasserali.1041992No ratings yet
- Analysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated WindingsDocument10 pagesAnalysis of Surface Permanent Magnet Machines With Fractional-Slot Concentrated Windingsjstyle423No ratings yet
- Microprocessors and Microsystems: K. Thangarajan, A. SoundarrajanDocument10 pagesMicroprocessors and Microsystems: K. Thangarajan, A. SoundarrajanfvijayamiNo ratings yet
- Comparison of Geometry-Based Transformer Iron-Core Models For Inrush-Current and Residual-Flux CalculationsDocument7 pagesComparison of Geometry-Based Transformer Iron-Core Models For Inrush-Current and Residual-Flux CalculationsjorgeayreNo ratings yet
- A Flux-Based PMSM Motor Model Using RBF PDFDocument6 pagesA Flux-Based PMSM Motor Model Using RBF PDFLê Đức ThịnhNo ratings yet
- Sistemas de Motor - ModelizacionDocument8 pagesSistemas de Motor - ModelizacionJosue Rivera YaresiNo ratings yet
- A Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesDocument7 pagesA Permanent Magnet Synchronous Motor Traction Applications Electric VehiclesJavad Rahmany FardNo ratings yet
- 10 1 1 1034 5168 PDFDocument6 pages10 1 1 1034 5168 PDFRosa Elvira Montalvo MartínezNo ratings yet
- Fault Tolerant Flux MnemonicDocument6 pagesFault Tolerant Flux MnemonicNea AnnaNo ratings yet
- Simanek 2008Document6 pagesSimanek 2008José Francisco Gallardo OjedaNo ratings yet
- Electromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinesDocument4 pagesElectromagnetic Torque Capabilities of Axial-Flux and Radial-Flux Permanent-Magnet MachinessosiNo ratings yet
- Position Sensorless Control For An Interior Permanent Magnet Synchronous Motor SVM Drive With ANN Based Stator Flux EstimatorDocument6 pagesPosition Sensorless Control For An Interior Permanent Magnet Synchronous Motor SVM Drive With ANN Based Stator Flux EstimatorKamrul HasanNo ratings yet
- Modeling and Analysis of 6 Phase Synchronous MotorDocument14 pagesModeling and Analysis of 6 Phase Synchronous MotorArif IqbalNo ratings yet
- 2 PDFDocument14 pages2 PDFArif IqbalNo ratings yet
- Modeling of Space Harmonic Interactions in Axial Flux Permanent Magnet GeneratorsDocument16 pagesModeling of Space Harmonic Interactions in Axial Flux Permanent Magnet GeneratorsM2A AutotrônicaNo ratings yet
- 3D MEC Modeling of A Hybrid-Excited Claw Pole Alternator Incorporating The Rotor MotionDocument7 pages3D MEC Modeling of A Hybrid-Excited Claw Pole Alternator Incorporating The Rotor Motionreddy venkata krishnaNo ratings yet
- Elementary Analysis of Segmental StatorDocument7 pagesElementary Analysis of Segmental StatordafNo ratings yet
- A Novel Calculation Method On The Current Information of Vector Inverter For Interior Permanent Magnet Synchronous Motor For Electric VehicleDocument4 pagesA Novel Calculation Method On The Current Information of Vector Inverter For Interior Permanent Magnet Synchronous Motor For Electric VehicleMt GolesNo ratings yet
- Soo Whangbaek2012Document10 pagesSoo Whangbaek2012Quang HoàngNo ratings yet
- Synchronous Machine DynamicsDocument13 pagesSynchronous Machine DynamicsSebastián Chica MedranoNo ratings yet
- A Three-Phase Multi-Legged Transformer Model ATP Using Directly-Formed Inverse Inductance Matrix Xusheng Chen, Member, Ieee Department of Electrical Engineering Seattle UniversityDocument9 pagesA Three-Phase Multi-Legged Transformer Model ATP Using Directly-Formed Inverse Inductance Matrix Xusheng Chen, Member, Ieee Department of Electrical Engineering Seattle UniversitydeekshavenkateshNo ratings yet
- Field Weakening With Nonlinear Controller Design For An Interior Permanent Magnet Synchronous MotorDocument6 pagesField Weakening With Nonlinear Controller Design For An Interior Permanent Magnet Synchronous MotorAli H. NumanNo ratings yet
- A Novel Switched Reluctance Motor With C-Core StatorsDocument8 pagesA Novel Switched Reluctance Motor With C-Core Statorsapi-26587237No ratings yet
- Martinez - Lightning Performance Analysis of Overhead Transmission Lines Using The EMTP PDFDocument11 pagesMartinez - Lightning Performance Analysis of Overhead Transmission Lines Using The EMTP PDFDiego AcostaNo ratings yet
- Sarac 2016Document7 pagesSarac 2016Marko_DelNo ratings yet
- Developing A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineDocument6 pagesDeveloping A 3D FEM Model For Electromagnetic Analysis of An Axil Flux Permanent Magnet MachineaugustoNo ratings yet
- A STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET SynchroDocument6 pagesA STUDY ON DETERMINATION OF PARAMETERS FOR PERMANENT MAGNET SynchroGrettel QuintanaNo ratings yet
- Model of A Highly Saturated Three-Phase Autotransformer With Tertiary Winding and Five Limb CoreDocument12 pagesModel of A Highly Saturated Three-Phase Autotransformer With Tertiary Winding and Five Limb CoreLuis ÁtilaNo ratings yet
- Performance Analysis of Frameless Motors For RobotsDocument4 pagesPerformance Analysis of Frameless Motors For RobotsManasi BhaveNo ratings yet
- Dynamic and Steady-State Performance ofDocument6 pagesDynamic and Steady-State Performance ofQuang HoàngNo ratings yet
- Improved Analytical Model For Predicting The Magnetic Field Distribution in Brushless Permanent-Magnet MachinesDocument10 pagesImproved Analytical Model For Predicting The Magnetic Field Distribution in Brushless Permanent-Magnet MachinesmitulNo ratings yet
- 12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling SiDocument7 pages12pulse Lci Synchronous Drive For A 20 MW Compressor Modeling Sijeevan sankarNo ratings yet
- Synchronous Condenser Parameter Identification Based On Time-Frequency TransformDocument5 pagesSynchronous Condenser Parameter Identification Based On Time-Frequency TransformMa QiyanNo ratings yet
- Pspice Simulation of SPIMDocument7 pagesPspice Simulation of SPIMMohammad SubhanNo ratings yet
- On Modeling of A Four-Quadrant Switched PDFDocument11 pagesOn Modeling of A Four-Quadrant Switched PDFSergeyNo ratings yet
- Handbook of Power Systems Engineering with Power Electronics ApplicationsFrom EverandHandbook of Power Systems Engineering with Power Electronics ApplicationsNo ratings yet
- Types & Uses of Fibcs Flexible Intermediate Bulk Containers: U-Panel BagsDocument5 pagesTypes & Uses of Fibcs Flexible Intermediate Bulk Containers: U-Panel BagsJorwin ButialNo ratings yet
- Series (G3) : Remote MonitoringDocument2 pagesSeries (G3) : Remote MonitoringGirish IyerNo ratings yet
- Schneider Installation Guide Pages N33-N48-N49Document3 pagesSchneider Installation Guide Pages N33-N48-N49josette_hajjarNo ratings yet
- Electrical Workshop: 1) Safety ClothesDocument12 pagesElectrical Workshop: 1) Safety Clothessohail arshadNo ratings yet
- Electrical Test EquipmentsDocument17 pagesElectrical Test Equipmentsengrroy100% (1)
- DARPS System - UHF Antenna (PROCOM CXL 900-6LW)Document2 pagesDARPS System - UHF Antenna (PROCOM CXL 900-6LW)VishalNo ratings yet
- Development of Hardware-in-the-Loop (HIL) and Fast Prototyping Tool (FPT) Using OPAL-RTDocument18 pagesDevelopment of Hardware-in-the-Loop (HIL) and Fast Prototyping Tool (FPT) Using OPAL-RTaboofazilNo ratings yet
- 24 Volt Off-Highway Starters & Alternators: Quick Reference GuideDocument4 pages24 Volt Off-Highway Starters & Alternators: Quick Reference Guideابرار عمرNo ratings yet
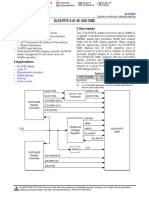
- DLP470TE 0.47 4K UHD DMD: 1 Features 3 DescriptionDocument44 pagesDLP470TE 0.47 4K UHD DMD: 1 Features 3 DescriptionRojan SolelyNo ratings yet
- 'Ulyhfrq: Instruction ManualDocument36 pages'Ulyhfrq: Instruction ManualAndri kuswandiNo ratings yet
- Line-3 (4) - Bay-403 (401) - 400KV - #Document12 pagesLine-3 (4) - Bay-403 (401) - 400KV - #1453hNo ratings yet
- NEW-PBL KIT Manual PDFDocument44 pagesNEW-PBL KIT Manual PDFpawan khalse100% (1)
- Man 8037t PRGDocument286 pagesMan 8037t PRGalinger zanabriaNo ratings yet
- Configured Digitally Programmable Potentiometer (DPP™) : Programmable Voltage ApplicationsDocument15 pagesConfigured Digitally Programmable Potentiometer (DPP™) : Programmable Voltage ApplicationsWisesaNo ratings yet
- W1000562 PDFDocument64 pagesW1000562 PDFJuan Carlos Alvarez MoralesNo ratings yet
- Kabeldon Cable Accessories 1-420 KV EnglishDocument6 pagesKabeldon Cable Accessories 1-420 KV EnglishAnonymous xBi2FsBxNo ratings yet
- Electrical Systems DemoDocument45 pagesElectrical Systems Demoronald lazo100% (1)
- Service 3121163 05-14-03 Global EnglishDocument70 pagesService 3121163 05-14-03 Global EnglishСвятослав ВороновNo ratings yet
- LDR PDFDocument136 pagesLDR PDFvighneshNo ratings yet
- Dip05 2a72 21LDocument2 pagesDip05 2a72 21Lm0gaNo ratings yet
- Cablex: 14 Distribution CentersDocument7 pagesCablex: 14 Distribution CentersTechnoCommercial2 OfficeNo ratings yet
- Q3 General Physics W456Document6 pagesQ3 General Physics W456Elia Saph MoonNo ratings yet
- AGC300 AGC300 Rev0Document11 pagesAGC300 AGC300 Rev0raj_ritu_aNo ratings yet
- The Micro-Inverter: Francine V. NotteDocument49 pagesThe Micro-Inverter: Francine V. Nottemanish_chaturvedi_6No ratings yet
- Datasheet 7425Document1 pageDatasheet 7425Thalles ThayroneNo ratings yet
- Bul. 440R - Guardmaster® Safety Relays (DI, DIS, SI, CI, GLP, EM, and EMD)Document12 pagesBul. 440R - Guardmaster® Safety Relays (DI, DIS, SI, CI, GLP, EM, and EMD)Carlos AguirreNo ratings yet
- Parts and Service Manual Supplement: Part No. 104980 Rev A November 2005Document39 pagesParts and Service Manual Supplement: Part No. 104980 Rev A November 2005Святослав ВороновNo ratings yet
- Eaton Vacuum Interruption (EVI) Technology - BR - 03 - 2013Document8 pagesEaton Vacuum Interruption (EVI) Technology - BR - 03 - 2013Venna Karthik ReddyNo ratings yet
- Table of Relay Outputs With tYPE 1-2-3-4-13 (Variable Speed Control)Document2 pagesTable of Relay Outputs With tYPE 1-2-3-4-13 (Variable Speed Control)راجيرحمةربهNo ratings yet
- OM-2075 90C24 Con PlanosDocument236 pagesOM-2075 90C24 Con PlanosLider TallerNo ratings yet