Download as pdf or txt
You might also like
- Lab Report Experiment TrussesDocument14 pagesLab Report Experiment TrussesNEWTAN100% (3)
- 9355 30kVA Service Manual - A02Document294 pages9355 30kVA Service Manual - A02Fidel Arroyo69% (13)
- YS-K01 Door Drive ManualDocument46 pagesYS-K01 Door Drive ManualMuhammad Rashid100% (6)
- Siemens Win TDCDocument32 pagesSiemens Win TDCBilal Aslam100% (1)
- Ml200 SeriesDocument64 pagesMl200 Seriesnagnp7040No ratings yet
- vc-02 v1.0.0 SpecificationDocument16 pagesvc-02 v1.0.0 SpecificationMarin MarinovNo ratings yet
- CL57T-V41 ManualDocument14 pagesCL57T-V41 ManualErnesto MoralesNo ratings yet
- DM860T V3.0Document12 pagesDM860T V3.0Rizki PragustomoNo ratings yet
- Vc-02-Kit Specification v1.0.0Document15 pagesVc-02-Kit Specification v1.0.0Marin MarinovNo ratings yet
- Ai-719 Artificial Intelligence Industrial ControllerDocument46 pagesAi-719 Artificial Intelligence Industrial ControllerFabio SilvaNo ratings yet
- DM556S User ManualDocument12 pagesDM556S User ManualJorge James Coronel MendiguriNo ratings yet
- SK200-1W Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Document10 pagesSK200-1W Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Вадим МкртчянNo ratings yet
- DM860S User ManualDocument13 pagesDM860S User ManualAbel ferreira de britoNo ratings yet
- Null PDFDocument48 pagesNull PDFLuiza OcheanaNo ratings yet
- CL57TDocument14 pagesCL57TNassim SADIKOUNo ratings yet
- E28-2G4M27S User Manual: Sx1280 2.4Ghz 27Dbm Spi High Speed Lora ModuleDocument11 pagesE28-2G4M27S User Manual: Sx1280 2.4Ghz 27Dbm Spi High Speed Lora ModuleBao TranNo ratings yet
- TYWE3S Datasheet - Tuya Smart - DocsDocument15 pagesTYWE3S Datasheet - Tuya Smart - DocsHyperPrintNo ratings yet
- HAT520N enDocument17 pagesHAT520N enCris BOlivarNo ratings yet
- Mitsubishi MELSERVO-J2S-S099: For Engineering SampleDocument84 pagesMitsubishi MELSERVO-J2S-S099: For Engineering SampleBrendisNo ratings yet
- Sn74ahc1g04 q1Document24 pagesSn74ahc1g04 q1jpscuroNo ratings yet
- Nautel NX 10Document224 pagesNautel NX 10Juan Guillermo Llano TamayoNo ratings yet
- GRT100C 6F2S0844-1.1Document290 pagesGRT100C 6F2S0844-1.1krishna mohanNo ratings yet
- Distributor: Breaker & Switchgears Overseas Sales DeptDocument58 pagesDistributor: Breaker & Switchgears Overseas Sales DeptLUATNo ratings yet
- 1P Rail-Mount Split-PLC Prepayment Meter User Manual v1.01 (1120)Document14 pages1P Rail-Mount Split-PLC Prepayment Meter User Manual v1.01 (1120)Iyanda Alaba100% (2)
- GRB150D 6F2S0900-3.1Document250 pagesGRB150D 6F2S0900-3.1krishna mohanNo ratings yet
- Bergerlahr Wdp3 01x ManualDocument114 pagesBergerlahr Wdp3 01x ManualAmit SharmaNo ratings yet
- Quick Guide FC360Document52 pagesQuick Guide FC360Minh Nguyễn50% (2)
- Instruction Manual Frequency, Voltage Relay GRF100 - BDocument153 pagesInstruction Manual Frequency, Voltage Relay GRF100 - Bkrishna mohanNo ratings yet
- CL86T V41Document13 pagesCL86T V41Lenin PastranaNo ratings yet
- DM556T_V4.0Document10 pagesDM556T_V4.0حساب 1No ratings yet
- Solid-State Relay Module - PLC-OSC-24DC/ 24DC/ 2/ACT - 2966676Document15 pagesSolid-State Relay Module - PLC-OSC-24DC/ 24DC/ 2/ACT - 2966676Billy Austin FernandoNo ratings yet
- Mediciones DVD'sDocument107 pagesMediciones DVD'sdeimos1No ratings yet
- ABB ACS 1000 Tech Catalog RevDDocument161 pagesABB ACS 1000 Tech Catalog RevDElena Koneva50% (2)
- Acs 1000 Technical CatalogDocument106 pagesAcs 1000 Technical CatalogMiguel LaraNo ratings yet
- Coral Accelerator Module DatasheetDocument21 pagesCoral Accelerator Module DatasheetrobnewportsydneyNo ratings yet
- Bachelor of Technology: HP Education ServicesDocument43 pagesBachelor of Technology: HP Education ServicesAbhinav Pratap SinghNo ratings yet
- LSM110ADocument24 pagesLSM110ATerlumun JosephNo ratings yet
- ACS1000 Technical CatalogDocument106 pagesACS1000 Technical CatalogLuis Alejandro Prieto MujicaNo ratings yet
- GRT100D 6F2S0857 5.0 Tosiba PDFDocument337 pagesGRT100D 6F2S0857 5.0 Tosiba PDFputrasejahtraNo ratings yet
- GRD130D 6F2S0904 1.2Document296 pagesGRD130D 6F2S0904 1.2krishna mohanNo ratings yet
- Microstep-Driver R60Document12 pagesMicrostep-Driver R60Yudes LiyanageNo ratings yet
- Voltlogic230 Manual enDocument51 pagesVoltlogic230 Manual enmax riosNo ratings yet
- Data Image: Corporation CTP Module SpecificationDocument42 pagesData Image: Corporation CTP Module SpecificationImadMehdiNo ratings yet
- Service Manual: Martin ME 102 Electrosurgery UnitDocument50 pagesService Manual: Martin ME 102 Electrosurgery UnitPepoNo ratings yet
- Solid-State Relay Module - PLC-OPT-24DC/ 24DC/2 - 2900364: Your AdvantagesDocument14 pagesSolid-State Relay Module - PLC-OPT-24DC/ 24DC/2 - 2900364: Your AdvantagesJesus Alonso Vargas EspejoNo ratings yet
- SK200-100mw Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Document10 pagesSK200-100mw Lora Anti-Interference Wireless Single-Channel Switch Module v1.1Luís RolaNo ratings yet
- 7SJ41 Definite-Time Overcurrent Protection Relay Instruction ManualDocument15 pages7SJ41 Definite-Time Overcurrent Protection Relay Instruction Manualtien taiNo ratings yet
- GRB100B 6F2S0814-1.9Document333 pagesGRB100B 6F2S0814-1.9Christos ApostolopoulosNo ratings yet
- AC W2 PowerDocument46 pagesAC W2 PowerLucas SimiNo ratings yet
- UM - SP Series - 75-1000-0390 - A0Document45 pagesUM - SP Series - 75-1000-0390 - A0林介浩No ratings yet
- DC20DM1Document25 pagesDC20DM1Esteban Valencia100% (1)
- DM542TDocument12 pagesDM542TjpaquetNo ratings yet
- Manual Vamp 265Document220 pagesManual Vamp 265Proteccion MedicionNo ratings yet
- E01C-Ml01D User Manual: Si24R1 2.4Ghz Spi Dip Wireless ModuleDocument9 pagesE01C-Ml01D User Manual: Si24R1 2.4Ghz Spi Dip Wireless Modulegipsyking2010No ratings yet
- WB2L Module Datasheet - Tuya IoT Development Platform - Tuya IoT Development PlatformDocument31 pagesWB2L Module Datasheet - Tuya IoT Development Platform - Tuya IoT Development PlatformMarcelo KrewerNo ratings yet
- E72-2G4M05S1A Usermanual EN v1.1Document12 pagesE72-2G4M05S1A Usermanual EN v1.1Pedro MartinhoNo ratings yet
- VRM 8.3 DC-DC Converter Design Guidelines: Order Number: 243870-004Document15 pagesVRM 8.3 DC-DC Converter Design Guidelines: Order Number: 243870-004draNo ratings yet
- 1136 E01-ML01DP5 Usermanual EN V1.2Document11 pages1136 E01-ML01DP5 Usermanual EN V1.2HectorNo ratings yet
- ACS 1000 Medium Voltage AC Drives: Technical CatalogDocument104 pagesACS 1000 Medium Voltage AC Drives: Technical Catalogjuan bautista vezzosiNo ratings yet
- Chapter2-Hardware Components For Automation and Process ControlDocument62 pagesChapter2-Hardware Components For Automation and Process ControlCao LoiNo ratings yet
- ACS 1000 TechCatalog 3BHS125029 RevCDocument106 pagesACS 1000 TechCatalog 3BHS125029 RevCluis enrique granados mendozaNo ratings yet
- Scentroid SS400-Operation Manual-V2.0Document21 pagesScentroid SS400-Operation Manual-V2.0delboni delboniNo ratings yet
- Astronomy NotesDocument2 pagesAstronomy Notessherlyn rose v. binay-anNo ratings yet
- Time Value of Money-PowerpointDocument83 pagesTime Value of Money-Powerpointhaljordan313No ratings yet
- Fmi 9Document2 pagesFmi 9Fracisco TorresNo ratings yet
- 02 ExplorationDocument50 pages02 ExplorationYernar TiyntayevNo ratings yet
- On January 2Document2 pagesOn January 2Chris Tian FlorendoNo ratings yet
- El Ácido ClorogénicoDocument10 pagesEl Ácido ClorogénicoJonatan VelezNo ratings yet
- Revision Grade 7Document10 pagesRevision Grade 7Yousaf SaleemNo ratings yet
- Retina: Product CatalogDocument60 pagesRetina: Product CatalogMohamed GamalNo ratings yet
- Liang Chapter 2Document62 pagesLiang Chapter 2THEO DOMINIC REQUERME SILVOSANo ratings yet
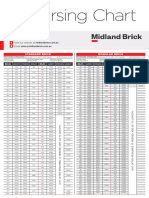
- Midland Brick Coursing ChartDocument2 pagesMidland Brick Coursing ChartMichael Slater100% (1)
- Solucion Ejercicios Impares Ed NagleDocument748 pagesSolucion Ejercicios Impares Ed NagleDavid García100% (1)
- Amal Jyothi College of Engineering: BTMA2019-23-S4: MAT202-Probability, Statistics and Numerical Methods-Series IIDocument2 pagesAmal Jyothi College of Engineering: BTMA2019-23-S4: MAT202-Probability, Statistics and Numerical Methods-Series IIAshish K BennyNo ratings yet
- Ethernet: A Direct Link Network With Media Access ControlDocument14 pagesEthernet: A Direct Link Network With Media Access ControlJuani PollaviniNo ratings yet
- Experiment 9Document5 pagesExperiment 9Rohit BiswasNo ratings yet
- Kitab TayarDocument50 pagesKitab TayarAhmad Adzha100% (1)
- Prose: 5 The Summit Within: I Never Dreamed I Would Encounter A Snake in My BackyardDocument28 pagesProse: 5 The Summit Within: I Never Dreamed I Would Encounter A Snake in My BackyardSmiley CrochetNo ratings yet
- BET Assignment 2 - QuestionsDocument3 pagesBET Assignment 2 - QuestionsKalkien CtNo ratings yet
- Grade 7 Lesson PlanDocument5 pagesGrade 7 Lesson PlanCorazon YcotNo ratings yet
- Magic Quadrant For Data Integration Tools 2007Document16 pagesMagic Quadrant For Data Integration Tools 2007Sagardeep RoyNo ratings yet
- INSTOCK IPAS EDI InstructionDocument27 pagesINSTOCK IPAS EDI InstructionFei XueNo ratings yet
- Superposition TheoremDocument18 pagesSuperposition TheoremShoubhik SahaNo ratings yet
- Weight of CalculationDocument5 pagesWeight of Calculationlitaanggita fordesignNo ratings yet
- Chapter 16: Semiconductor Devices: Maharashtra State BoardDocument18 pagesChapter 16: Semiconductor Devices: Maharashtra State BoardAmish ShahNo ratings yet
- Lorentz Pump ManualDocument16 pagesLorentz Pump ManualGirish OniyilNo ratings yet
- Use of Near-Infrared Spectroscopy For Qualitative and Quantitative Analyses of Grains and Cereal ProductsDocument169 pagesUse of Near-Infrared Spectroscopy For Qualitative and Quantitative Analyses of Grains and Cereal ProductsK_NEMONo ratings yet
- New PSC I GirderDocument64 pagesNew PSC I Girderrahul sumanNo ratings yet
- AWRDocument32 pagesAWRSANJAY BALA100% (4)