Professional Documents
Culture Documents
vi-xu-ly-dieu-khien
vi-xu-ly-dieu-khien
Uploaded by
Cần PhạmCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
vi-xu-ly-dieu-khien
vi-xu-ly-dieu-khien
Uploaded by
Cần PhạmCopyright:
Available Formats
Vi xử lý điều khiển
đồ án cơ sở (Trường Đại học Phenikaa)
Scanne pour ouvrir sur Studocu
Studocu n'est pas sponsorisé ou supporté par une université ou un lycée
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
TRƯỜNG ĐẠI HỌC PHENIKAA
KHOA ĐIỆN - ĐIỆN TỬ
KỸ THUẬT VI XỬ LÝ VÀ VI ĐIỀU KHIỂN
BÀI TIỂU LUẬN
ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG PWM SỬ DỤNG PIC 16F887
VÀ MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN NGOÀI
Nhóm thực hiện: Nhóm 3
Thành viên nhóm: Vũ Quốc Đạt 21010875 K15 ĐK&TĐH1
Lê Hồng Đức 21010876 K15 ĐK&TĐH1
Đặng Quang Minh 21012554 K15 ĐK&TĐH1
Giảng viên hướng dẫn: ThS. Đào Tô Hiệu
Khoa: Điện – Điện tử
Hà Nội, tháng 4 năm 2023
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
TRƯỜNG ĐẠI HỌC PHENIKAA
KHOA ĐIỆN - ĐIỆN TỬ
KỸ THUẬT VI XỬ LÝ VÀ VI ĐIỀU KHIỂN
BÀI TIỂU LUẬN
ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG PWM SỬ DỤNG PIC 16F887
VÀ MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN NGOÀI
Nhóm thực hiện: Vũ Quốc Đạt 21010875 K15 ĐK&TĐH1
Lê Hồng Đức 21010876 K15 ĐK&TĐH1
Đặng Quang Minh 21012554 K15 ĐK&TĐH1
Giảng viên hướng dẫn: ThS. Đào Tô Hiệu
Khoa: Điện – Điện tử
Hà Nội, tháng 4 năm 2023
LỜI CAM ĐOAN
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Chúng tôi xin cam đoan đề tài: “Điều khiển tốc độ động cơ bằng PWM sử
dụng PIC 16F887 và MOSFET/BJT bởi 1 nút nhấn dùng ngắt ngoài ” là một công
trình nghiên cứu độc lập không có sự sao chép, thuê mượn, copy của người khác. Đề
tài là một sản phẩm mà chúng tôi đã nỗ lực nghiên cứu trong quá trình học tập tại
trường. Trong quá trình viết bài có sự tham khảo một số tài liệu có nguồn gốc rõ ràng,
dưới sự hướng dẫn của thầy ThS. Đào Tô Hiệu - Giảng viên Khoa Điện – Điện tử,
Trường Đại học Phenikaa. Chúng tôi xin cam đoan sẽ chịu hoàn toàn trách nhiệm nếu
có vấn đề xảy ra.
Nhóm sinh viên thực hiện
(Ký, ghi rõ họ tên)
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
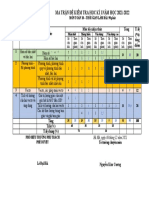
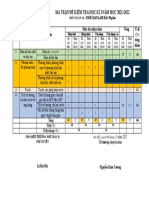
RUBIC BÁO CÁO/TIỂU LUẬN
Mức độ đạt chuẩn quy định
Trọng
Tiêu Điểm Điểm Điểm Điểm Điểm số
chí (0-3.9) (4.0-5.4) (5.5-6.9) (7.0-8.4) (8.5-10)
SV không
đạt tiến độ
về nội
dung thực
SV đạt
hiện được SV đạt SV đạt SV đạt
được từ
giao (dưới được từ được từ được từ
Tiến 85% -
4 điểm tiêu 40% - 54% 55% - 69% 40% - 54%
độ 100% tiến
chí này) . tiến độ về tiến độ về tiến độ về 20%
thực độ về nội
Sinh viên nội dung nội dung nội dung
hiện dung thực
không đạt thực hiện thực hiện thực hiện
hiện được
được tiêu được giao được giao được giao
giao
chí này sẽ
bị 0 điểm
các tiêu chí
còn lại
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Mức độ đạt chuẩn quy định
Trọng
Tiêu Điểm Điểm Điểm Điểm Điểm số
chí (0-3.9) (4.0-5.4) (5.5-6.9) (7.0-8.4) (8.5-10)
Hình Đơn điệu, Đơn điệu, Đơn điệu, trình bày
Đơn điệu,
thức chữ nhỏ, chữ nhỏ, chữ nhỏ, đẹp, lỗi
chữ nhỏ,
quyển nhiều lỗi nhiều lỗi nhiều lỗi chính tả
nhiều lỗi
báo chính tả chính tả từ chính tả từ dưới 10%
chính tả từ
cáo trên 85% 50% đến 10% đến nội dung, 20%
30% đến
và nội dung, dưới 85% dưới 30% tính thẩm
dưới 50%
slide không có nội dung, ít nội dung, mỹ cao và
nội dung, ít
trình tính thẩm có tính có tính bắt mắt
thẩm mỹ
chiếu mỹ thẩm mỹ thẩm mỹ người xem
Trả lời gần
Trả Trả lời Trả lời đúng tất cả
Trả lời Trả lời
lời đúng dưới đúng dưới các câu
đúng 1/2 đúng tất cả 20%
câu 1/2 số câu 2/3 số câu hỏi, có ý
số câu hỏi các câu hỏi
hỏi hỏi hỏi chưa đầy
đủ
Kỹ Không Dưới 50% 75% thành 100% 100% 20%
năng tham gia thành viên viên tham thành viên thành viên
nhóm nhóm và tham gia gia thực đề tham gia tham gia
và thuyết trình thực đề tài tài và thực đề tài thực hiện.
thuyết không và thuyết thuyết trình nhưng hiệu Qua trình
trình thuyết trình kém kém thuyết quả phối thuyết trình
phục, thuyết phục và ít hợp nhóm thể hiện
không giao phục và giao lưu thực sự nói rõ, tự
lưu gười không giao người nghe hiệu quả, tin, thuyết
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Mức độ đạt chuẩn quy định
Trọng
Tiêu Điểm Điểm Điểm Điểm Điểm số
chí (0-3.9) (4.0-5.4) (5.5-6.9) (7.0-8.4) (8.5-10)
khả năng
thuyết trình
phục, giao
còn hạn
lưu người lưu hấp
nghe chế, chưa
nghe dẫn người
thực sự
nghe
thuyết
phục
Chất Đáp ứng Đáp ứng Đáp ứng Đáp ứng Đáp ứng 20%
lượng dưới 50% 50%-60% 60%-70% 70%-80% 80%-100%
sản yêu cầu. yêu cầu. yêu cầu. yêu cầu. yêu cầu.
phẩm Sv/nhóm Đáp ứng Đáp ứng Đáp ứng Đáp ứng
SV phải có dưới 50% dưới 50% dưới 50% dưới 50%
sản phẩm yêu cầu. yêu cầu. yêu cầu. yêu cầu.
theo yêu Sv/nhóm Sv/nhóm Sv/nhóm Sv/nhóm
cầu. Báo SV phải có SV phải có SV phải có SV phải có
cáo, sản sản phẩm sản phẩm sản phẩm sản phẩm
phẩm phải theo yêu theo yêu theo yêu theo yêu
do bản cầu. Báo cầu. Báo cầu. Báo cầu. Báo
thân cáo, sản cáo, sản cáo, sản cáo, sản
sinh phẩm phải phẩm phải phẩm phải phẩm phải
viên/nhóm do bản do bản do bản do bản
sinh viên thân thân thân thân
thực hiện. sinh sinh sinh sinh
Nếu có dấu viên/nhóm viên/nhóm viên/nhóm viên/nhóm
hiệu copy, sinh viên sinh viên sinh viên sinh viên
thuê làm thực hiện. thực hiện. thực hiện. thực hiện.
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Mức độ đạt chuẩn quy định
Trọng
Tiêu Điểm Điểm Điểm Điểm Điểm số
chí (0-3.9) (4.0-5.4) (5.5-6.9) (7.0-8.4) (8.5-10)
Nếu có dấu Nếu có dấu Nếu có dấu Nếu có dấu
hiệu copy, hiệu copy, hiệu copy, hiệu copy,
Đồ án hoặc
thuê làm thuê làm thuê làm thuê làm
đạt được
Đồ án hoặc Đồ án hoặc Đồ án hoặc Đồ án hoặc
sản phẩm
đạt được đạt được đạt được đạt được
nhưng
sản phẩm sản phẩm sản phẩm sản phẩm
không nắm
nhưng nhưng nhưng nhưng
được nội
không nắm không nắm không nắm không nắm
dung cũng
được nội được nội được nội được nội
như
dung cũng dung cũng dung cũng dung cũng
kết
như như như như
quả thì
kết kết kết kết
sinh viên
quả thì quả thì quả thì quả thì
bị 0 điểm.
sinh viên sinh viên sinh viên sinh viên
Mọi tiêu
bị 0 điểm. bị 0 điểm. bị 0 điểm. bị 0 điểm.
chí đánh
Mọi tiêu Mọi tiêu Mọi tiêu Mọi tiêu
giá tiếp
chí đánh chí đánh chí đánh chí đánh
theo chỉ
giá tiếp giá tiếp giá tiếp giá tiếp
được xem
theo chỉ theo chỉ theo chỉ theo chỉ
xét khi
được xem được xem được xem được xem
sinh viên
xét khi xét khi xét khi xét khi
đạt được
sinh viên sinh viên sinh viên sinh viên
tối thiểu 4
đạt được đạt được đạt được đạt được
điểm yêu
tối thiểu 4 tối thiểu 4 tối thiểu 4 tối thiểu 4
cầu này
điểm yêu điểm yêu điểm yêu điểm yêu
cầu này. cầu này. cầu này. cầu này.
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
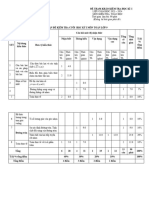
TIẾN ĐỘ THỰC HIỆN
I) Thành viên nhóm
ST
Hình ảnh Thông tin cá nhân
T
- Họ và tên: Vũ Quốc Đạt
- Mã SV: 21010875
- Lớp: K15 ĐK&TĐH1
1
- Trường Đại học Phenikaa.
- SĐT: 0972721164
- Nơi ở: Hà Nội
- Họ và tên: Lê Hồng Đức
- Mã SV: 21010876
- Lớp: K15 ĐK&TĐH1
2
- Trường Đại học Phenikaa.
- SĐT: 0868009475
- Nơi ở: Hà Nội
- Họ và tên: Đặng Quang Minh
- Mã SV: 21012554
- Lớp: K15 ĐK&TĐH1
3
- Trường Đại học Phenikaa.
- SĐT: 0967790014
- Nơi ở: Hà Nội
II) Phân công nhiệm vụ
Thành viên Nhiệm vụ được giao Nhóm đánh giá
Lê Hồng Đức Thiết kế mạch nguyên lý và pcb Đạt/không đạt
Đặng Quang Minh Lập trình code Đạt/không đạt
Vũ Quốc Đạt Làm phần cứng Đạt/không đạt
II) Tiến độ thực hiện
Nội dung Thời gian thực hiện Kết quả
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Tìm hiểu về mạch ổn áp LM7805 22/03/2023 Hoàn thành
Vẽ sơ đồ mạch ổn áp LM7805 22/03/2023 Hoàn thành
Tìm hiểu điều khiển động cơ PWM 24/03/2023 Hoàn thành
Tìm hiểu cách sử dụng 25/03/2023 Hoàn thành
MOSFET/BJT
Vẽ sơ đồ điều khiển động cơ bằng 28/03/2023 Hoàn thành
PWM sử dụng MOSFET/BJT
Nhóm sinh viên thực hiện
(Ký, ghi rõ họ tên)
III) Đánh giá tiến độ thực hiện
................................................................................................................................
................................................................................................................................
................................................................................................................................
................................................................................................................................
................................................................................................................................
Điểm chấm tiến độ: ….. Điểm (Dưới 4 điểm là không đạt, các tiêu chí còn lại mặc
định chấm 0 điểm).
GIẢNG VIÊN
(Ký, ghi rõ họ tên)
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
MỤC LỤC
CHƯƠNG I: CƠ SỞ LÝ THUYẾT.............................................................................4
1.1. TỔNG QUAN VI ĐIỀU KHIỂN...........................................................................4
1.2. VI ĐIỀU KHIỂN PIC16F887................................................................................5
1.2.1. Cấu hình chân PIC 16F887....................................................................................6
1.2.2. Sơ đồ khối PIC 16F887.......................................................................................13
1.3 Điều chế xung PWM..............................................................................................14
1.3.1. Khái niệm............................................................................................................14
1.3.2 Nguyên lý hoạt động.............................................................................................15
1.4. Linh kiện và thiết bị sử dụng...............................................................................16
CHƯƠNG II: THIẾT KẾ HỆ THỐNG....................................................................17
2.1. Mô tả hệ thống......................................................................................................17
2.1.1. Giới thiệu.............................................................................................................17
2.1.2. Tính năng.............................................................................................................17
2.1.3. Phạm vi áp dụng..................................................................................................17
2.2. Sơ đồ khối hệ thống..............................................................................................18
2.3. Thiết kế mạch nguyên lý......................................................................................18
2.3.1. Khối nguồn..........................................................................................................19
2.3.2. Khối xử lý trung tâm...........................................................................................20
2.3.3. Khối điều khiển động cơ.....................................................................................21
2.3.4. Khối hiển thị........................................................................................................23
2.3.5. Khối nút bấm.......................................................................................................23
2.3.6. Khối nạp code......................................................................................................24
2.3.7. Sơ đồ toàn mạch..................................................................................................24
2.4. Tính toán sử dụng linh kiện.................................................................................26
2.4.1. MOSFET IRF3205..............................................................................................26
2.4.2. IC LM7805..........................................................................................................27
2.4.3. Opto PC817.........................................................................................................28
2.4.4. Diode 1N5399......................................................................................................29
2.4.5. Diode 1N4007......................................................................................................30
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
2.4.6. LED 7 thanh.........................................................................................................31
2.4.7. Điện trở, tụ điện và đèn Led đơn.........................................................................32
2.5. Chế tạo mạch xử lý...............................................................................................35
Công cụ cần chuẩn bị..................................................................................................35
2.6. Quy trình thực hiện..............................................................................................35
2.7. Lưu đồ thuật toán.................................................................................................39
2.9. Kết luận chương...................................................................................................40
CHƯƠNG III: KẾT QUẢ..........................................................................................41
3.1. Sản phẩm đạt được...............................................................................................41
3.1.1 Quá trình thử nghiệm............................................................................................41
3.1.2 Sản phẩm hoàn thiện.............................................................................................41
3.1.3 Quá trình vận hành...............................................................................................42
3.2. Nhận xét.................................................................................................................43
3.2.1. Ưu điểm...............................................................................................................43
3.2.2. Nhược điểm.........................................................................................................43
3.2.3. Giải pháp khắc phục............................................................................................44
Cách ly RF – RF ISOLATOR....................................................................................44
Cách ly từ tính..............................................................................................................44
3.3. Kết luận.................................................................................................................45
3.4. Hướng phát triển..................................................................................................45
TÀI LIỆU THAM KHẢO...........................................................................................46
PHỤ LỤC.....................................................................................................................47
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
DANH MỤC HÌNH ẢNH
Hình 1.1: Hình dạng thực tế của PIC 16F887.............................................................4
Hình 1.2: Sơ đồ chân PIC 16F887 DIP 40 chân..........................................................5
Hình 1.3: Sơ đồ của package QFN và TQFP................................................................6
Hình 1.4: Hình sơ đồ khối của PIC 16F887
.....................................................................................................................................
13
Hình 1.5: Hình xung PWM
.....................................................................................................................................
14
Hình 2.1: Sơ đồ khối
.....................................................................................................................................
18
Hình 2.2: Sơ đồ nguyên lý mạch
.....................................................................................................................................
19
Hình 2.3: Sơ đồ nguyên lý của khối nguồn
.....................................................................................................................................
20
Hình 2.4: Sơ đồ nguyên lý của khối xử lý trung tâm
.....................................................................................................................................
21
Hình 2.5: Sơ đồ nguyên lý của khối điều khiển động cơ
.....................................................................................................................................
23
Hình 2.6: Sơ đồ nguyên lý của khối hiển thị
.....................................................................................................................................
23
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.7: Sơ đồ nguyên lý của khối nút bấm
.....................................................................................................................................
24
Hình 2.8: Sơ đồ nguyên lý của khối nạp code
.....................................................................................................................................
24
Hình 2.9: Sơ đồ mạch in
.....................................................................................................................................
25
Hình 2.10: Sơ đồ bố trí linh kiện
.....................................................................................................................................
26
Hình 2.11: IRF3205
.....................................................................................................................................
27
Hình 2.12: LM7805
.....................................................................................................................................
28
Hình 2.13: Opto PC817
.....................................................................................................................................
29
Hình 2.14: Diode 1N5399
.....................................................................................................................................
30
Hình 2.15: Diode 1N4007
.....................................................................................................................................
30
Hình 2.16: LED 7 Thanh
.....................................................................................................................................
31
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.17: Điện trở 1K và 330 Ohm
.....................................................................................................................................
32
Hình 2.18: Tụ điện hóa
.....................................................................................................................................
33
Hình 2.19: Tụ gốm
.....................................................................................................................................
34
Hình 2.20: Led đơn 3mm
.....................................................................................................................................
34
Hình 2.21: Lưu đồ thuật toán hệ thống
.....................................................................................................................................
39
Hình 2.22: Giải thích code
.....................................................................................................................................
40
Hình 3.1: Test mạch trên Breadboard
.....................................................................................................................................
41
Hình 3.2: Mặt trước mạch điều khiển sau khi hoàn thiện
.....................................................................................................................................
42
Hình 3.3: Mặt sau mạch điều khiển sau khi hoàn thiện
.....................................................................................................................................
42
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
DANH MỤC BẢNG BIỂU
Bảng 1: Cấu hình chân PIC 16F887
.....................................................................................................................................
12
Bảng 2: Linh kiện sử dụng
.....................................................................................................................................
16
Bảng 3: Bảng mã HEX LED 7 thanh
.....................................................................................................................................
32
Bảng 4: Công cụ chuẩn bị
.....................................................................................................................................
35
Bảng 5: Các bước thực hiện làm mạch cứng
.....................................................................................................................................
38
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
LỜI NÓI ĐẦU
LÝ DO CHỌN ĐỀ TÀI
Ngày nay khoa học công nghệ hiện đại đã có những bước tiến nhanh và xa đi
theo nó là những thành tựu ứng dụng trong các lĩnh vực đời sống, công nghiệp thì hầu
hết mọi người đều sử dụng các công nghệ hiện đại. Và mức sống của con người được
nâng cao thì việc quản lí các thiết bị công nghệ khoa học là hết sức cần thiết. Chính vì
thế việc điều khiển thiết bị lại mang nhiều lợi ích.
• Ứng dụng thực tiễn: Điều khiển động cơ là một ứng dụng rất phổ biến trong các
thiết thị điện tử như xe đạp điện, máy khoan, …
• Tiết kiệm chi phí: Sử dụng PIC 16F887 và MOSFET/BJT điều chế tốc độ động
cơ là giải pháp kinh tế và tiết kiệm chi phí so với việc sử dụng các thiết bị điều
khiển động cơ khác với giá thành đắt đỏ.
• Thúc đẩy kiến thức kỹ thuật: Việc nghiên cứu và thực hiện đề tài này sẽ giúp cho
nhóm em có thêm kiến thức và kĩ năng trong lĩnh vực điện tử và lập trình vi điều
khiển, đồng thời cũng nâng cao khả năng tư duy logic và giải quyết vấn đề kỹ
thuật
• Phù hợp với khả năng nghiên cứu của nhóm thực hiện: Việc sử dụng PIC 16F887
và MOSFET/BJT đều để điều khiển động cơ là một giải pháp đơn giản và phổ
biến. Đồng thời, việc điều khiển tốc độ động cơ bằng PWM và sử dụng nút nhấn
dùng ngắt ngoài cũng là một bài toán thực tế.
Vì vậy, sau một thời gian học tập, tìm hiểu tài liệu với sự giảng dạy của các thầy
cô giáo và nghiên cứu. Cùng với sự dẫn dắt của giáo viên hướng dẫn của thầy/cô: ThS.
Đào Tô Hiệu. Chúng em đã chọn đề tài: “ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG
PWM SỬ DỤNG PIC 16F887 VÀ MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN
NGOÀI” làm bài tiểu luận môn vi xử lý và vi điều khiển của chúng em.
ĐỐI TƯỢNG NGHIÊN CỨU
Ở bài tiểu luận này nội dung nghiên cứu chủ yếu tập trung vào:
• Tìm hiều về vi điều khiển PIC 16F887
• Các tạo ra và điều khiển động cơ bằng PWM
• Áp dụng thành công sử dụng núy nhấn dùng ngắt ngoài
1
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
• Làm mạch mô phỏng và cso sản phẩm hoàn chỉnh
MỤC TIÊU
Mục tiêu khi thực hiện bài tiểu luận này:
• Nghiên cứu về nguyên lý hoạt động của điều khiển động cơ bằng PWM: Tìm
hiểu về các thức hoạt động của vi điều khiển PIC 16F887, MOSFET/BJT, và
PWM để điều khiển tốc độ động cơ.
• Thiết kế mạch điều khiển: Thiết kế mạch điều khiển bằng vi điều khiển PIC
16F887 và MOSFET/BJT để điều khiển tốc độ động cơ bằng PWM.
• Lập trình vi điều khiển: Viết chương trình lập trình cho vi điều khiển PIC
16F887 để điều khiển tốc độ bằng động cơ bằng PWM.
• Thực hiện mô phỏng: Thực hiện mô phỏng mạch điều khiển trên phần mềm
Proteus để kiểm tra tính đúng đắn của mạch.
• Làm mô hình thực tế: Xây dựng mô hình thực thế thông qua việc dựa trên phần
mô phỏng.
NỘI DUNG NGHIÊN CỨU
Đề tài “ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG PWM SỬ DỤNG PIC 16F887 VÀ
MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN NGOÀI” có các nội dung chính
như sau:
• Tìm hiểu các hoạt động của PIC 16F887.
• Tìm hiểu về nguyên lý hoạt động và các điều khiển động cơ bằng PWM.
• Lựa chọn linh kiện phù hợp.
• Thiết kế mạch điều khiển tốc độ bằng động cơ PWM.
• Lập trình PIC 16F887.
• Thiết kế mạch nguồn ổn áp.
• Thử nghiệm và kiểm tra độ chính xác.
• Thiết kế và lắp đặt.
• Chỉnh sửa lỗi
• Đánh giá kết quả thực hiện.
• Viết và báo cáo bài tập lớn.
PHƯƠNG PHÁP NGHIÊN CỨU
2
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Do đây là một đồ án sản phẩm, nên chúng em đã áp dụng phương pháp nghiên cứu:
• Tìm hiểu lý thuyết: tìm hiểu lý thuyết liên quan đến điều khiển tốc độ động cơ
PWM, PIC 16F887 và MOSFET/BJT.
• Thiết kế mạch điện và viết chương trình: thiết kế mạch và viết chương trình bảo
đảm sự chính xác và ổn định.
• Chạy thử: đưa ra kết luận và cải thiện chương trình điều khiển tốc độ động cơ
PWM.
GIỚI HẠN
Đề tài “ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG PWM SỬ DỤNG PIC 16F887 VÀ
MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN NGOÀI” có những giới hạn sau:
• Thiết kế mô hình với PIC16F887 để điều khiển tốc độ động cơ PWM
• Nhận biết trạng thái của xung bởi 1 nút nhấn dùng ngắt ngoài
• Sử dụng phần mềm CCS trong việc lập trình điều khiển.
• Sử dụng phần mềm Proteus để thiết kế mạch mô phỏng.
• Viết chương trình kết hợp PIC16F887 trong việc gửi và nhận dữ liệu
Hiện nay, vi điều khiển đã được ứng dụng rộng rãi ở Việt Nam và được ứng
dụng rất nhiều. Trên cơ sở lý thuyết đã học trong môn Kỹ thuật vi xử lý và vi điều
khiển, và trong khuôn khổ của bài tiểu luận chúng tôi đã thực hiện bài tiểu luận có đề
tài là “ĐIỀU KHIỂN TỐC ĐỘ ĐỘNG CƠ BẰNG PWM SỬ DỤNG PIC
16F887 VÀ
MOSFET/BJT BỞI 1 NÚT NHẤN DÙNG NGẮN NGOÀI” dưới sự hướng dẫn của
Th.S Đào Tô Hiệu. Mục tiêu chính của chúng tôi là có thể thiết kế được một mạch
điện có thể điều khiển tốc độ xung PWM bởi 1 nút nhấn.
Bài tiểu luận của chúng tôi còn nhiều thiếu xót do kiến thức và thời gian còn
nhiều hạn chế. Chúng tôi rất mong nhận được sự đóng góp và chỉnh sửa từ giảng viên
để hoàn thiện đề tài này. Chúng tôi xin chân thành cảm ơn Thầy Đào Tô Hiệu đã
hướng dẫn và giúp đỡ chúng tôi trong quá trình làm bài tiểu luận này.
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
CHƯƠNG I: CƠ SỞ LÝ THUYẾT
1.1. TỔNG QUAN VI ĐIỀU KHIỂN
Vi điều khiển là một máy tính được tích hợp trên một chip, nó thường được sử
dụng để điều khiển các thiết bị điện tử. Vi điều khiển, thực chất, là một hệ thống bao
gồm một vi xử lý có hiệu suất đủ dùng và giá thành thấp (khác với các bộ vi xử lý đa
năng dùng trong máy tính) kết hợp với các khối ngoại vi như bộ nhớ, các module
vào/ra, các module biến đổi số sang tương tự và tương tự sang số, … Vi điều khiển
thường được sử dụng để xây dựng các hệ thống nhúng. Nó cũng được sử dụng trong
các thiết bị điện, điện tử như máy giặt, lò vi sóng, điện thoại, đầu đọc DVD, thiết bị đa
phương tiện hay dây chuyền sản xuất tự động…
Vi xử lý có rất nhiều loại bắt đầu, từ 4-bit cho đến 32-bit. Vi xử lý 4-bit hienj nay
không còn dùng nhưng vi xử lý 8-bit thì vẫn còn mặc dù đã có vi xử lý 64-bit. Lý do
tồn tạo của vi xử lý 8-bit là vì phù hợp với một số yêu cầu vi điều khiển trong công
nghiệp. Các vi xử lý 32-bit, 64-bit thường sử dụng cho các máy tính lớn vì khối dữ
liệu của máy tính rất lớn nên cần các vi xử lý càng mạnh càng tốt. (Nhà xuất bản
Thanh Niên, 2018)
• PIC là một họ vi điều khiển RISC được sản xuất bởi công ty Microchip
Technology. Dòng PIC đầu tiên là PIC1650 được phát triển bởi Microelectronics
Division thuộc General Instrument.
• PIC bắt nguồn là chữ viết tắt của "Programmable Intelligent Computer" (Máy
tính khả trình thông minh) là một sản phẩm của hãng General Instrument đặt cho
dòng sản phẩm đầu tiên của họ là PIC1650.
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 1.1: Hình dạng thực tế của PIC 16F887
1.2. VI ĐIỀU KHIỂN PIC16F887
PIC16F887 là một chip vi điều khiển được sản xuất bời hãng Microchip thuộc họ
Pic. Pic16F887 là một bộ vi điều khiển 8-bit dựa trên kiến trúc RISC bộ nhớ chương
trình 8KB ISP flash có thể ghi xóa hàng nghìn lần, 256B EEPROM, một bộ nhớ RAM
vô cùng lớn trong thế giới vi xử lý 8 bit (368B SRAM)
Với 33 chân có thể sử dụng cho các kết nối vào hoặc ra i/O, 32 thanh ghi, 3 bộ
timer/counter có thể lập trình, có các gắt nội và ngoại (2 lệnh trên một vector ngắt),
giao thức truyền thông nối tiếp USART, SPI, I2C. Ngoài ra có thể sử dụng bộ biến đổi
số tương tự 10 bít (ADC/DAC) mở rộng tới 11 kênh, khả năng lập trình được
watchdog timer, hoạt động với 5 chế độ nguồn, có thể sử dụng tới 2 kênh điều chế độ
rộng xung (PWM) …
Hình 1.2: Sơ đồ chân PIC 16F887 DIP 40 chân
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 1.3: Sơ đồ của package QFN và TQFP
1.2.1. Cấu hình chân PIC 16F887
PIC 16F887 có 40 chân I/O, trong đó có 33 chân được sử dụng để kết nối với các
thiết bị ngoại vi như cảm biến, bộ nhớ và các linh kiện điện tử khác.
Các Tên các chân Chức năng
Port
RA0: xuất /nhập số bit thứ 0 của port
A
AN0: ngõ vào tương tự của kênh thứ
RA0/AN0/ULPWU/C12IN0- (2) 0
ULPWU: ngõ vào đánh thức CPU
công suất thấp
C12INO: ngõ vào âm thứ 0 của bộ
so sánh C1 hoặc C2
RA1: xuất /nhập số bit thứ 1 của port
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
A
RA1/AN1/ C12IN1- (3) AN1: ngõ vào tương tự của kênh thứ
1
C12IN1: ngõ vào âm thứ 1 của bộ so
sánh C1 hoặc C2
RA2: xuất /nhập số bit thứ 2 của port
A
Port A AN2: ngõ vào tương tự của kênh thứ
2
RA2/AN2/VREF-/CVREF/C2IN+ VREF-: ngõ vào điện áp chuẩn thấp
(4) của bộ ADC
CVREF: điện áp tham chiếu VREF
ngõ vào bộ so sánh
C2IN+: ngõ vào dương của bộ so
sánh C2
RA3: xuất /nhập số bit thứ 3 của port
A
RA3/AN3/VREF+/C1IN+ (5) AN3: ngõ vào tương tự của kênh thứ
3
VREF+: ngõ vào điện áp chuẩn cao
của bộ ADC
C1IN+: ngõ vào dương của bộ so
sánh C1
RA4: xuất /nhập số bit thứ 4 của port
A
RA4/T0CKI/C1OUT (6) T0CKI: ngõ vào xung clock từ bên
ngoài cho Timer0
C1OUT: ngõ ra bộ so sánh 1
RA5: xuất /nhập số bit thứ 5 của port
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
A
RA5/AN4/SS/C2OUT (7) AN4: ngõ vào tương tự của kênh thứ
4
SS: ngõ vào chọn lựa SPI
C2OUT: ngõ ra bộ so sánh 1
RA6: xuất /nhập số bit thứ 6 của port
A
RA6/OSC2/CLKOUT (14) OSC2: ngõ ra dao động thạch anh.
Kết nối đến thạch anh hoặc bộ cộng
hưởng
CLKOUT: ở chế độ RC, ngõ ra của
OSC2 bằng ¼ của OSC1
RA7: xuất /nhập số bit thứ 7 của port
A
RA7/OSC1/CLKIN (13) OSC1: ngõ vào dao động thạch anh
hoặc ngõ vào nguồn xung ở bên
ngoài
CLKIN: ngõ vào nguồn xung ở bên
ngoài
RB0: xuất /nhập số bit thứ 0 của port
B
RB0/AN12/INT (33) AN12: ngõ vào tương tự của kênh
thứ 12
INT: ngõ vào nhận tín hiệu ngắt
ngoài
RB1: xuất /nhập số bit thứ 1 của port
RB1/AN10/ C12IN3- (34) B
AN10: ngõ vào tương tự của kênh
thứ 10
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
C12IN3-: ngõ vào âm thứ 3 của bộ
Port B so sánh C1 hoặc C2
RB2: xuất /nhập số bit thứ 2 của port
RB2/AN8 (35) B
AN8: ngõ vào tương tự của kênh thứ
8
RB3: xuất /nhập số bit thứ 3 của port
B
AN9: ngõ vào tương tự của kênh thứ
RB3/AN9/PGM/C12IN2 (36) 9
PGM: chân cho phép lập trình điện
áp thấp ICSP
C12IN1-: ngõ vào âm thứ 2 của bộ
so sánh C1 hoặc C2
RB4: xuất /nhập số bit thứ 4 của port
B
RB4/AN11 (37) AN11: ngõ vào tương tự của kênh
thứ 11
RB5: xuất /nhập số bit thứ 5 của port
B
RB5/AN13/T 1 G (38) AN13: ngõ vào tương tự của kênh
thứ 13
T 1 G: ngõ vào Gate cho phép Timer1
đếm dùng để đếm độ rộng xung
RB6: xuất /nhập số bit thứ 6 của port
RB6/ICSPCLK (39) B
ICSPCLK: dùng clock lập trình nối
tiếp
RB7: xuất /nhập số bit thứ 7 của port
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
RB7ICSPDAT (40) B
ICSPDAT: ngõ xuất nhập dữ liệu lập
trình nối tiếp
RC0: xuất /nhập số bit thứ 0 của port
C
RC0/T1OSO/T1CKI (15) T1OSO: ngõ ra của bộ dao động
Timer1
T1CKI: ngõ vào xung clock từ bên
ngoài Timer1
RC1: xuất /nhập số bit thứ 1 của port
C
RC1/T1OSI/CCP2 (16) T1OSI: ngõ vào của bộ dao động
Timer1
CCP2: ngõ vào Capture2, ngõ ra
compare2, ngõ ra PWM2
Port C RC2: xuất /nhập số bit thứ 2 của port
C
RC2/P1A/CCP1 (17) P1A: ngõ vào PWM
CCP1: ngõ vào Capture1, ngõ ra
comparel, ngõ ra PWM1
RC3: xuất /nhập số bit thứ 3 của port
C
RC3/SCK/SCL (18) SCK: ngõ vào xung clock nối tiếp
đồng bộ/ ngõ ra của chế độ SPI
SCL: ngõ vào xung clock nối tiếp
đồng bộ/ ngõ ra của chế độ I2C
RC4: xuất /nhập số bit thứ 4 của port
C
RC4/SDI/SDA (23) SDI: ngõ vào dữ liệu trong truyền dữ
10
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
liệu kiểu SPI
SDA: xuất/nhập dữ liệu I2C
RC5: xuất /nhập số bit thứ 5 của port
RC5/SDO (24) C
SDO: ngõ xuất dữ liệu trong truyền
dữ liệu kiểu SPI
RC6: xuất /nhập số bit thứ 6 của port
C
RC6/TX/CK (25) TX: ngõ ra phát dữ liệu trong chế độ
truyền bất đồng bộ UART
CK: ngõ ra cấp xung clock trong chế
độ truyền thông UART
RC7: xuất /nhập số bit thứ 7 của port
C
RC7/RX/DT (26) RX: ngõ vào nhận dữ liệu trong chế
độ truyền bất đồng bộ EUSART
DT: ngõ phát và nhận dữ liệu ở chế
độ đồng bộ EUSART
RD0 (19) RD0: xuất /nhập số bit thứ 0 của port
D
RD1 (20) RD1: xuất /nhập số bit thứ 1 của port
D
RD2 (21) RD2: xuất /nhập số bit thứ 2 của port
D
RD3 (22) RD3: xuất /nhập số bit thứ 3 của port
D
Port D RD4 (27) RD4: xuất /nhập số bit thứ 4 của port
D
RD5: xuất /nhập số bit thứ 5 của port
11
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
RD5/P1B (28) D
P1B: ngõ ra PWM
RD6: xuất /nhập số bit thứ 6 của port
RD6/P1C (29) D
P1C: ngõ ra PWM
RD7: xuất /nhập số bit thứ 7 của port
RD7/P1D (30) D
P1D: ngõ ra tăng cường CPP1
RE0/AN5 (8) RE0: xuất /nhập số bit thứ 0 của port
E
AN5: ngõ vào tương tự 5
RE1/AN6 (9) RD1: xuất /nhập số bit thứ 1 của port
E
AN6: ngõ vào tương tự 6
Port E RE2/AN7 (10) RD2: xuất /nhập số bit thứ 2 của port
E
AN7: ngõ vào tương tự 7
RD3: xuất /nhập số bit thứ 3 của port
E
RE3/MCLR/V PP (1) MCLR : ngõ vào reset tích cực mức
thấp
V PP : ngõ vào nhận điện áp khi ghi
dữ liệu vào bộ nhớ nội flash
Chân VDD (11, 32) Nguồn cung cấp dương từ 2 đến 5V
Chân VSS (12, 31) Nguồn cung cấp 0V
Bảng 1: Cấu hình chân PIC 16F887
12
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
1.2.2. Sơ đồ khối PIC 16F887
Hình 1.4: Hình sơ đồ khối của PIC 16F8871
1
https://pdf1.alldatasheet.com/datasheet-pdf/view/197543/MICROCHIP/PIC16F887.html
13
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Sơ đồ khối của PIC 16F887 bao gồm các:
• Bộ điều khiển trung tâm CPU: thực hiện các phép tính và điều khiển các hoạt
động của vi điều khiển
• Bộ nhớ: bao gồm bộ nhớ chính (RAM) và bộ nhớ chỉ đọc (ROM) để lưu trữ các
dữ liệu và chương trình
• Bộ thời gian (Timer): có thể được sử dụng để đếm thời gian
• Bộ chuyển đổi ADC: chuyển đổi tín hiệu analog thành dạng số để xử lý
• Các cổng giao tiếp: Bao gồm các cổng nối tiếp (UART), cổng SPI, cổng I2C,
cổng USB, …
• Bộ tạo xung (Osillator): tạo ra các xung dao động để đồng bộ hóa các hoạt động
của vi điều khiển
• Các chân I/O: dùng để kết nối với các thiết bị ngoại vi
1.3 Điều chế xung PWM
1.3.1. Khái niệm
PWM là một loại tín hiệu có thể được tạo ra từ một vi mạch kỹ thuật số như vi điều
khiển hoặc bộ định thời 555. Do đó, tín hiệu được tạo ra sẽ có một nhóm các xung và
các xung này sẽ ở dạng một sóng vuông. Có nghĩa là, tại bất kỳ thời điểm cụ thể nào,
sóng sẽ cao hoặc sẽ thấp. Để dễ hiểu, chúng ta hãy xem xét tín hiệu 5V PWM, trong
trường hợp này tín hiệu PWM sẽ là 5V (cao) hoặc ở mức 0V (thấp). Khoảng thời gian
mà tín hiệu duy trì ở mức cao được gọi là “thời gian bật” và khoảng thời gian tín hiệu
duy trì ở mức thấp được gọi là “thời gian tắt”.
Hình 1.5: Hình xung PWM
14
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Điều chế độ rộng xung (PWM) là một kỹ thuật điều khiển dòng điện tiện lợi
cho phép kiểm soát tốc độ của động cơ, sản lượng nhiệt của máy sưởi và hơn thế nữa
theo cách tiết kiệm năng lượng (và thường là êm hơn). Các ứng dụng hiện có cho
PWM bao gồm, nhưng không giới hạn:
1. Bộ điều khiển tốc độ quạt
2. Hệ thống truyền động máy nén VRF HVAC.
3. Mạch truyền động động cơ xe hybrid và điện.
4. Bộ điều chỉnh độ sáng LED.
1.3.2 Nguyên lý hoạt động
PWM hoạt động bằng cách tạo xung dòng điện một chiều và thay đổi khoảng thời
gian mà mỗi xung ở trạng thái “bật” để kiểm soát lượng dòng điện chạy đến một thiết
bị chẳng hạn như đèn LED. PWM là kỹ thuật số, có nghĩa là nó có hai trạng thái: bật
và tắt (tương ứng với 1 và 0 trong ngữ cảnh nhị phân, sẽ trở nên phù hợp hơn với bạn
nếu sử dụng bộ vi điều khiển).
Mỗi xung được bật càng lâu, đèn LED sẽ càng sáng. Do khoảng thời gian giữa các
xung quá ngắn nên đèn LED không thực sự tắt. Nói cách khác, nguồn điện của đèn
LED bật và tắt quá nhanh (hàng nghìn lần mỗi giây) đến mức đèn LED thực sự vẫn
sáng mà không nhấp nháy. Điều này được gọi là làm mờ PWM, và mạch như vậy chỉ
được gọi là mạch điều chỉnh độ sáng LED PWM
- Nếu chu kỳ làm việc của bộ nguồn PWM được đặt thành 70%, thì xung sẽ bật
trong 70% thời gian và nó tắt 30% thời gian. Chu kỳ nhiệm vụ đề cập đến lượng thời
gian nó được bật. Ở chu kỳ hoạt động 70%, độ sáng của đèn LED phải gần 70%. Mối
tương quan giữa chu kỳ nhiệm vụ và độ sáng không phải là tuyến tính 100%, vì hiệu
suất của đèn LED thay đổi theo lượng dòng điện được cung cấp.
- Nếu chu kỳ nhiệm vụ là 0%, toàn bộ tín hiệu sẽ bằng phẳng. Chu kỳ nhiệm vụ
PWM là 0% có nghĩa là nguồn bị tắt. Trong trạng thái như vậy, đèn LED sẽ không
hoạt động.
Lý do chính khiến các mạch PWM rất hiệu quả là chúng không cố gắng hạn chế một
phần dòng điện sử dụng điện trở mà chúng bật và tắt hoàn toàn dòng điện.
15
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
1.4. Linh kiện và thiết bị sử dụng
STT Tên Số lượng
1 PIC16F887-IP 1
2 Đế cắm ic 40 chân 1
3 Tụ gốm 20pf 2
4 Tụ hóa 50V 470uf 2
5 Tụ gốm 50V 0.1uf 2
6 Jumper đực 5 chân 1
7 Điện trở 10kΩ 1/4W 3
8 Điện trở 330Ω 1/4W 10
9 Điện trở 1kΩ 1
10 Jack DC cái 5.5mmx2.1mm 1
11 Đèn Led 3mm 1
12 Mosfet IRF3205 1
13 IC ổn áp LM7805 1
14 Diode 1N5399 1
15 Diode 1N4007 1
16 Opto PC817 1
17 Thạch anh 16MHz 1
18 Cầu đấu dây 2
19 Đế tản nhiệt 2
20 Nút nhấn 2 chân 2
Bảng 2: Linh kiện sử dụng
1.5. Kết luận chương
Chương I đã trình bày cơ sở lý thuyết về linh kiện, lý thuyết về PIC 16F887 tiếp
theo chương II sẽ trình bày về thiết kế hệ thống
16
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
CHƯƠNG II: THIẾT KẾ HỆ THỐNG
2.1. Mô tả hệ thống
2.1.1. Giới thiệu
Điều khiển tốc độ cơ bằng PWM (Điều chế độ rộng xung) là một phương pháp
điều khiển tốc độ cơ thông qua việc thay đổi độ rộng xung điện (chu kỳ nhiệm vụ) của
tín hiệu PWM. Trong đó, việc sử dụng PIC 16F887 và MOSFET/BJT giúp chúng ta có
thể điều khiển xung PWM ở mức độ rộng và từ đó điều khiển tốc độ động cơ.
Với sự hỗ trợ của nút nhấn sử dụng rút ngắn bên ngoài, ta có thể thực hiện việc
tăng hoặc giảm tốc độ động cơ chỉ bằng một lần nhấn. Sau đó, PIC 16F887 sẽ gửi
tín hiệu PWM điều khiển MOSFET/BJT để thay đổi tốc độ động cơ.
Điều này yêu cầu sự hiểu biết về ngôn ngữ lập trình C, đặc biệt là việc lập
trình cho PIC 16F887 và các linh kiện điện tử như MOSFET/BJT.
2.1.2. Tính năng
• Điều khiển tốc độ động cơ bằng PWM: hệ thống cho chép điều khiển tốc độ
động cơ bằng cách thay đổi tần số và độ rộng xung PWM. Điều này cho phép
người dùng điều chỉnh tốc độ động cơ linh hoạt hơn.
• Sử dụng PIC 16F887: Vi điều khiển PIC 16F887 là một vi điều khiển 8-bit có
khả năng xử lý cao và nhiều tính năng hỗ trợ cho các ứng dụng điều khiển động
cơ.
• Sử dụng MOSFET/BJT: có khả năng chịu được dòng điện lớn và độ bền cao.
• Sử dụng nút ngắt ngoài: Khi người dùng ấn nút tốc độ động cơ sẽ tăng hoặc
giảm.
• Hệ thống đơn giản dễ sử dụng
2.1.3. Phạm vi áp dụng
• Điều khiển tốc độ quạt: muốn điều khiển tốc độ quạt nhanh hay chậm sử dụng
nút nhấn để thực hiện
• Điều khiển động cơ máy móc: muốn điều chỉnh tốc độ của động cơ máy khoan
thông qua một nút nhấn để điều chỉnh dòng điện cấp vào.
• Điều khiển tốc độ động cơ Robot: trong điều khiển tốc độ động cơ bằng PWM để
điều chỉnh tốc độ của bánh xe hay cánh tay robot thông qua một nút nhấn.
17
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
2.2. Sơ đồ khối hệ thống
Hình 2.1: Sơ đồ khối
2.3. Thiết kế mạch nguyên lý
Điện áp đầu vào: Mạch sử dụng nguồn DC 5V qua Jack DC sau khi qua khối
nguồn để ổn định điện áp sẽ được sử dụng để dùng cho khối chính
Tín hiệu đầu vào: Mạch điều khiển sử dụng ngõ vào (input) là nút nhấn để lấy
tín hiệu đầu vào về tốc độ động cơ. Tín hiệu đầu vào sẽ được chuyển đổi sang dạng số
và được PIC16F887 đọc và xử lý ở khối chính sau khi đã được nạp chương trình từ
khối nạp code
Tính toán độ rộng xung PWM: Sau khi đọc tín hiệu đầu vào từ nút bấm,
PIC16F887 sẽ tính toán và sản xuất xung PWM với độ rộng và chu kỳ phù hợp. Độ
rộng xung PWM sẽ được tính dựa trên tốc độ động cơ mong muốn và tỷ lệ giữa độ
rộng xung và chu kỳ xung. Độ rộng xung PWM sẽ quyết định tỷ lệ thời gian động cơ
được cấp điện trong mỗi chu kỳ xung.
Kích hoạt MOSFET: Xung PWM được đưa vào mạch điều khiển gồm mạch
cách ly PC817 MOSFET để kích hoạt MOSFET và cho phép dòng điện đi qua
MOSFET, từ đó cung cấp điện áp đến động cơ.
18
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Điều chỉnh tốc độ động cơ: Việc điều chỉnh độ rộng xung PWM bằng nút bấm sẽ
thay đổi tỷ lệ thời gian động cơ được cấp điện trong mỗi chu kỳ xung, do đó điều
chỉnh tốc độ quay của động cơ.
Hình 2.2: Sơ đồ nguyên lý mạch
2.3.1. Khối nguồn
Khối nguồn là khối rất quan trọng vì cung cấp nguồn nuôi cho toàn bộ mạch của
hệ thống. Để cho mạch hoạt động ổn định với điện áp ở mức 5V thì sử dụng IC
LM7805
Khối nguồn được kết nối với các tụ lọc nhiễu để giảm thiểu nhiễu và dao động
trong nguồn điện. Tụ lọc nhiễu được đặt song song với IC 7805, được kết nối giữa
chân đầu vào và chân đất của IC 7805. Tụ lọc này hoạt động như một bộ lọc điện, loại
bỏ các tín hiệu nhiễu trong nguồn điện.
Trong mạch nguồn ổn áp, diode được mắc nối tiếp chân In của IC7805 nhằm bảo
vệ IC khỏi sự phá hủy do điện áp ngược và nhiễu điện từ.Ngoài ra, diode cũng giúp
giảm thiểu nhiễu điện từ bằng cách làm giảm điện áp tạm thời và dao động tại đầu vào
của IC LM7805. Điều này cũng giúp tăng độ ổn định của mạch nguồn ổn áp.
19
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Ngoài ra, đèn LED được sử dụng để báo hiệu nguồn đang hoạt động. Đèn LED
được kết nối song song với IC LM7805 và tụ lọc nhiễu, với chân dương được kết nối
với chân đầu ra của IC 7805 và chân âm được kết nối với chân đất.
Khi nguồn điện được cấp vào mạch nguồn, IC LM7805 sẽ điều chỉnh và giữ cho
điện áp đầu ra ổn định ở mức 5V DC. Các tụ lọc nhiễu sẽ giảm thiểu nhiễu và dao
động trong nguồn điện. Đèn LED sẽ sáng để báo hiệu rằng nguồn đang hoạt động.
Với sự hoạt động ổn định của mạch nguồn và sự hỗ trợ của các tụ lọc nhiễu
và đèn LED, hệ thống có thể hoạt động một cách đáng ổn định và lâu dài. Sơ đồ mạch
như hình
Hình 2.3: Sơ đồ nguyên lý của khối nguồn
2.3.2. Khối xử lý trung tâm
Khối xử lý trung tâm của mạch điều khiển động cơ DC được thực hiện bằng sử
dụng xung PWM từ vi điều khiển như PIC16F887.
Cụ thể, PIC16F887 có thể được sử dụng để tạo ra xung PWM với tần số và chu
kỳ được chỉ định bởi nút bấm thông qua chương trình chính, sử dụng chức năng của
PIC16F887 để cấu hình bộ định thời nội. Sau đó, xung PWM có thể được sử dụng để
điều khiển tốc độ quay của động cơ DC thông qua việc thay đổi tần số xung PWM.
Nếu giá trị độ rộng xung PWM cao hơn, tốc độ động cơ sẽ tăng lên. Ngược lại, nếu
giá trị độ rộng xung PWM thấp hơn, tốc độ động cơ sẽ giảm xuống.
20
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.4: Sơ đồ nguyên lý của khối xử lý trung tâm
2.3.3. Khối điều khiển động cơ
Các thành phần chính của khối điều khiển động cơ gồm:
MOSFET: MOSFET sẽ được kết nối với động cơ DC để điều khiển dòng điện chạy
qua động cơ.
PC817: Mạch cách ly PC817 sẽ được sử dụng để cách ly tín hiệu điều khiển PWM
giữa vi điều khiển và MOSFET tránh trường hợp lỗi xảy ra ở khối điều khiển động cơ
gây ảnh hưởng tới khối điều khiển.
Diode 1N4007: Bảo vệ MOSFET khỏi các tác động xung điện từ động cơ khi
MOSFET ngắt dòng điện
Nguyên lý hoạt động:
• Sử dụng nút nhấn tạo tín hiệu ngắt ngoài đưa vào pic16f887.
• Pic16f887 nhận tín hiệu ngắt ngoài vào chân B0 sau đó tính toán độ rộng xung
điều khiển tốc độ động cơ theo chương trình đã được lập trình. Tính toán xong
xung PWM được xuất ra tại chân CCP1.
• Xung PWM qua điện trở 330ohm giảm dòng điện đưa vào anode PC817 cathode
kết nối với GND. Xung PWM điều khiển bật tắt led quang trong PC817 tạo tín
21
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
hiệu tắt mở tương ứng ở chân Collector và Emitter tương ứng cho phép dòng
điện cung cấp từ domino đi qua.
• Nguồn điện chạy qua điện trở 1K(điện trở đóng vai trò giúp giảm khả năng
transistor bị hư hỏng do quá dòng và giúp kéo dòng điện về mức an toàn) rồi đi
từ chân Collector qua Emitter sau đó đi vào chân Gatecủa IRF3205 khiến Mosfet
mở cho dòng điện chạy qua mortor từ chân S xuống chân D( chân S được kết nói
với dương nguồn, chân D kết nối với âm nguồn). Điện trở 10k kết nối 2 chân G
và D của mosfet được coi là một điện trở kéo là để đảm bảo rằng chân G của
MOSFET được giữ ở mức thấp (logic 0) khi chân G không được kết nối với bất
kỳ tín hiệu điều khiển nào. Điều này giúp tránh tình trạng "nổi", mức điện áp trên
chân G có thể đạt đến mức cao (logic 1) khi không có tín hiệu điều khiển và làm
cho động cơ chạy không đúng.
• Khi độ rộng xung PWM giảm đi, tín hiệu điện từ chân collector của PC817 cũng
sẽ giảm, làm cho MOSFET ngắt dòng điện và động cơ dừng lại. Khi MOSFET
ngắt dòng điện, diode sẽ dẫn xung điện ngược từ động cơ qua nó, bảo vệ
MOSFET khỏi các tác động xung điện ngược và đảm bảo cho mạch hoạt động
bình thường.
Quá trình này được lặp lại nhiều lần mỗi giây để điều khiển tốc độ của động cơ DC.
Việc sử dụng mạch cách ly PC817 giúp tăng độ an toàn và độ tin cậy trong quá trình
điều khiển động cơ, bảo vệ các thành phần khỏi những tác động từ môi trường bên
ngoài.
Hình 2.5: Sơ đồ nguyên lý của khối điều khiển động cơ
22
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
2.3.4. Khối hiển thị
Để hiển thị độ rộng xung hay cấp tốc độ của động cơ thì khối hiển thị sử dụng
Led 7 đoạn với Anot chung. Số hiển thị trên led 7 đoạn tương ứng với số lần bấm nút
từ 0 đến 9 và bắt đầu lại từ 0 nếu đạt đến 9 hoặc reset lại chương trình
Hình 2.6: Sơ đồ nguyên lý của khối hiển thị
2.3.5. Khối nút bấm
Khối nút bấm gồm 2 nút bấm để reset và tăng tốc độ động cơ. Nút reset được nối
với chân VPP của PIC để có thể khởi động lại chương trình trong PIC trở về trạng thái
ban đầu. Nút bấm thứ 2 được nối chân RB0 để thay đổi tốc độ động cơ. Khi bấm nút
mức logic tại chân RB0 của PIC lên mức cao, chương trình trong pic chạy lệnh điều
kiện để tăng độ rộng xung từ đó đưa xung PWM ra khối điều khiển để tăng tốc độ
động cơ
23
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.7: Sơ đồ nguyên lý của khối nút bấm
2.3.6. Khối nạp code
Khối nạp code của PIC gồm 6 jump đơn được nối lần lượt với các chân VPP, VCC,
GND, RB7 và RB6. Khối nạp code cho phép đổi mã nguồn thành mã máy (binary) và
lưu trữ chúng trên bộ nhớ FLASH (ROM) trên PIC16F887 qua phần mềm PICKIT2 .
Việc nối ra jumper cho phép nạp code mà không cần phải tháo linh kiện ra khỏi
mạch tránh việc làm hư hỏng thiết bị và giảm được việc không cần thiết, thuận
tiện hơn cho việc thao tác và vận hành thiết bị.
Hình 2.8: Sơ đồ nguyên lý của khối nạp code
2.3.7. Sơ đồ toàn mạch
Các thông số của mạch
in:
- Kích thước mạch: 90 x 61mm
- Kích thước đường mạch: 91x 62mm
24
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
• Đường dây cho khối nút nhấn, khối điều khiển, khối hiển thị sử dụng kích thước
dây 30th. Do những khối này không sử dụng dòng tải lớn, trong quá trình thiết kế
mạch nhóm em đã lựa chọn và sử dụng kích thước dây này nhằm mục đích dễ vẽ
đường mạch, đáp ứng đủ nhu cầu mà không gây thừa và ảnh hưởng tới đường
mạch tải.
• Đường dây cho khối nguồn và khối điều khiển được sử dụng kích thước 40th.
Khối nguồn cung cấp nguồn cho khối điều khiển cần sự ổn định, cung cấp đủ tải
trong quá trình vận hành điều khiển sử dụng đường dây kích thước 40th đảm bảo
hạn chế nhiễu sau quá trình ổn áp, chịu được tốt dòng tải cung cấp cho khối điều
khiển.
• Khối điều khiển dòng tải cung cấp tải cho động cơ được thiết kế sử dụng nguồn
độc lập tuỳ ý, sử dụng đường dây 50th cho khối đảm bảo hoạt động cho tải công
suất cao
- Khoảng cách giữa các đường mạch là 20th.
- Kích thước chân linh kiện theo chuẩn sản xuất
- Mạch được phủ đồng GND
Hình 2.9: Sơ đồ mạch in
25
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
v Sơ đồ bố trí linh kiện:
Linh kiện được bố trí theo từng khối thuận tiện cho việc đi dây.
Hình 2.10: Sơ đồ bố trí linh kiện
2.4. Tính toán sử dụng linh kiện
Sử dụng thạch anh dao động tần số 16MHz theo công thức tính toán điều chế
PWM có chu kỳ 900us tương ứng với tần số 1111Hz.
Từ cơ sở đó lựa chọn các linh kiện:
2.4.1. MOSFET IRF3205
IRF3205 là một loại MOSFET nguồn nằm trong gói TO-220AB. Con chip
này được sử dụng chủ yếu trong các ứng dụng toàn cầu trong mạch điện.
IRF3205 có khả năng điều khiển tải lên đến 110A với điện áp tối đa lên đến
55V. Transistor này có thể được dùng cho cả mục đích khuếch đại hoặc làm công tắc.
Với khả năng chuyển mạch tốc độ cao, IRF3205 còn được sử dụng trong các ứng dụng
cần tốc độ cao chuyển tải từ nguồn đầu vào này sang đầu vào khác. Điện áp tối thiểu
yêu cầu cho độ bão hòa đó là từ 2 – 4V. Ở chế độ xung, IRF3205 có thể điều khiển tải
lên đến 390A. Trong trường hợp đóng vai trò là bộ khuếch đại, nó có thể cung cấp tối
26
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
đa 200W nên đây là một transistor lý tưởng để lắp đặt trong các bộ khuếch đại âm
thanh công suất cao.
IRF3205 có khả năng chịu được dòng điện cao và có thể chịu được điện áp tới
55V nên phù hợp để sử dụng trong mạch điều khiển tốc độ động cơ (die231)
Sơ đồ chân: Hướng IRF3205 phía trước mặt thì sơ đồ chân theo thứ tự từ trái qua
phải lần lượt là: chân 1 (chân cổng G), chân 2 (chân máng D), chân 3 (chân nguồn S)
Hình 2.11: IRF32052
Thông số kĩ thuật:
• Điện áp đánh thủng là 55V.
• Điện áp VGS = +/-20V
• ID = 110A khi VGS = 10V
• Thời gian bật tắt: 101ns
• MOSFET loại N
• Kiểu chân: TO-220.
2.4.2. IC LM7805
LM7805 hay 7805 là IC điều chỉnh điện áp dương đầu ra 5V. Nó là IC của dòng ổn
áp dương LM78xx, được sản xuất trong gói TO-220 và các gói khác. IC này được sử
dụng rộng rãi trong các thiết bị thương mại và giáo dục. Nó cũng được sử dụng bởi
nhiều người đam mê điện tử và thợ mày mò do giá r 攃ऀ, dễ sử dụng và không cần nhiều
linh kiêṇ bên ngoài. IC có nhiều tính năng tích hợp lý tưởng để sử dụng trong nhiều
2
https://components101.com/mosfets/irf3205-pinout-datasheet
27
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
ứng dụng điện tử như dòng điện đầu ra 1.5A, chức năng bảo vệ quá tải, bảo vệ quá
nhiệt, dòng điện tĩnh thấp, v.v.
Hình 2.12: LM78053
Thông số kĩ thuật:
• Điện áp đầu vào 7 - 25VDC.
• Điện áp đầu ra: +5VDC
• Dòng điện đầu ra tối đa: 1.5A
• Tự ngắt khi quá nhiệt và bị ngắn mạch
• Kiểu chân: TO-220.
2.4.3. Opto PC817
PC817 là một opto được sử dụng rất phổ biến, nó chứa một LED hồng ngoại và
một transistor quang trong một gói. Opto hay còn được gọi là cách ly quang là những
linh kiện dạng IC có từ 4 chân đến nhiều chân, chủ yếu được sử dụng để cách ly hai
mạch với nhau.
Hoạt động của nó rất đơn giản, khi một điện áp được đặt vào LED hồng ngoại
được nối trên chân 1 và 2, LED sẽ được kích hoạt và ánh sáng được nhận bởi transistor
3
https://components101.com/ics/7805-voltage-regulator-ic-pinout-datasheet
28
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
quang bên trong làm cho nó ở trạng thái bão hòa từ đó nối chân 3 và 4 với nhau.
PC817 là một opto được sử dụng rộng rãi và hoạt động trong mạch điện tử chỉ với
nhiệm vụ cách ly. Nếu bạn cần nhiều tác vụ cách ly hơn cùng lúc thì bạn cũng có thể
sử dụng các opto khác có chứa vài LED hồng ngoại và transistor quang trong một gói
duy nhất.
Hình 2.13: Opto PC8174
Thông số kĩ thuật:
• Điện áp đầu vào chân A- C tối thiểu: 1.25V.
• VCE max: 80V
• IC tối đa: 50mA
• Loại transistor: NPN
• Nhiệt độ hoạt động: -30 đến +100 độ C
• Thời gian bật tắt: 18us
• Loại đóng gói: DIP4
2.4.4. Diode 1N5399
Diode 1N5399 là một loại diode chuyển mục đích (rectifier diode) được sử dụng
rộng rãi trong các mạch điện tử. Nó có thể chịu được dòng điện tối đa là 1.5A và điện
áp tối đa là 1000V.
4
https://components101.com/ics/pc817-ic-pinout-equivalent-datasheet
29
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.14: Diode 1N53995
Thông số kĩ thuật:
• Điện áp tối đa: 1000V
• Dòng điện tối đa: 1.5A
• Loại gói: DO-45
2.4.5. Diode 1N4007
Diode 1N4007 là một loại diode chuyển mục đích (rectifier diode) được sử dụng
rộng rãi trong các mạch điện tử. Nó có thể chịu được dòng điện tối đa là 1A và điện áp
tối đa là 1000V.
Hình 2.15: Diode 1N4007
Thông số kĩ thuật:
5
https://robocon.vn/detail/do46-diode-chinh-luu-1n5399.html
30
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
• Điện áp tối đa: 1000V
• Dòng điện tối đa: 1A
• Loại gói: DO-45
2.4.6. LED 7 thanh
LED 7 thanh (7-segmant Display) là thiết bị điện tử được thiết kế để hiển thị số
và kí tự khác. Nó bao gồm 7 đoạn LED được xếp lại song song với nhau thành hình
chữ nhật. Mỗi đoạn LED được đánh dấu từ A tới G, riêng đoạn LED ở ngoài cùng ký
hiệu là DP được sử dung để hiển thị số không phải là nguyên giống như dấu”,”. LED 7
thanh được chia làm 2 loại là:
• Loại dương chung: nếu cực dương của tất cả LED được nối với nhau ở mức logic
cao và các cực âm đứng riêng l 攃ऀ sẽ phát sáng bằng cách áp dụng mức logic thấy
thông qua điện trở giới hạn dòng.
• Loại âm chung: nếu cực âm của tất cả LED được nối với nhau ở mức logic thấp
và các cực dương đứng riêng l 攃ऀ được nối với mức logic cao thông qua điện trở
giới hạn dòng. (die23)
Tuy nhiên ở trong bài báo cáo lần này nhóm em sử dụng LED 7 thanh loại dương
nguồn để thực hiện.
Hình 2.16: LED 7 Thanh6
Dưới đây là bảng mã HEX để hiển thị số trên LED 7 thanh:
Số nhị phân
6
https://dammedientu.vn/bai-4-led-7-thanh-don-id5-html
31
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Số 7 6 5 4 3 2 1 0 HEX
dp g f e d c b a
0 1 1 0 0 0 0 0 0 C0
1 1 1 1 1 1 0 0 1 F9
2 1 0 1 0 0 1 0 0 A4
3 1 0 1 1 0 0 0 0 B0
4 1 0 0 1 1 0 0 1 99
5 1 0 0 1 0 0 1 0 92
6 1 0 0 0 0 0 1 0 82
7 1 1 1 1 1 0 0 0 8F
8 1 0 0 0 0 0 0 0 80
9 1 0 0 1 0 0 0 0 90
Bảng 3: Bảng mã HEX LED 7 thanh
2.4.7. Điện trở, tụ điện và đèn Led đơn
A) Điện trở
Điện trở là một loại linh kiện phổ biến nó là một thành phần điện thụ động gồm 2
tiếp điểm kết nối thường được dùng để hạn chế cường độ dòng điện chảy trong mạch.
Tác dụng của điện trở thường được sử dụng để giới hạn dòng điện trong mạch.
Hình 2.17: Điện trở 1K và 330 Ohm
B) Tụ điện
Tụ điện là một linh kiện điện tử thụ động cấu tạo từ hai bản cực đặt song song
được ngăn cách bởi lớp điện môi, tụ điện có tính chất cách điện 1 chiều nhưng cho
dòng điện xoay chiều đi qua nhờ nguyên lý phóng nạp. Khi xảy ra sự chênh lệch điện
thế tại hai điểm bề mặt, các bề mặt sẽ xuất hiện điện tích cùng điện lượng nhưng trái
32
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
dấu. Ký hiệu của tụ điện là “C” là từ viết hoa của Capacitior. Tụ điện được sử dụng
trong rất nhiều thiết bị điện tử như trong các mạch lọc tín hiệu, mạch nguồn, mạch
khuếch đại tín hiệu. (oto23)
Hình 2.18: Tụ điện hóa
Tụ gốm có chất điện môi được làm từ các vật liệu như titanium acid barium. Nó là
một loại tụ điện hóa và dùng cực phổ biến trên thị trường hiện nay. Tụ điện gốm có giá
trị điện dung của nó cao từ 1pF đến vài microfarad, nhưng lại không có giá trị điện
dung cao như tụ hóa. Hiện nay, tụ gốm được chế tạo và sản xuất có một khoảng khá
rộng đối với dung sai và giá trị điện áp hoạt động.
Ưu điểm của tụ điện này là bên trong không chế tạo thành cuộn như tụ nhôm, điều
này khiến độ tự cảm thấp, chính vì vậy mà nó có thể dùng thích hợp cho các ứng dụng
có tần số cao. Nó được đưa vào ứng dụng rộng rãi với nhiều mục đích và ghép thử
cùng dùng loại tụ gốm. (uni23)
33
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.19: Tụ gốm
C) Led đơn
Led là một biến thể trên diode cơ bản. Diode là một thành phần điện tử chỉ dẫn
điện theo một hướng. Nó xác định độ chênh lệch điện ấp nhỏ nhất giữa cực dương và
cực âm. Led là cơ bản giống như một diode, sự khác biệt ở đây là nó tạo ra ánh sáng
khi có dòng đi qua. (den23)
Mỗi đèn Led có một mức điện áp đầu vào nhất định để tạo ra ánh sáng. Nếu cung
cấp ít hơn mức này, nó sẽ không phát sáng. Điện áp hoạt động khoảng từ 2V đến 3V
Dòng điện cũng là trị số quan trọng hàng đầu cần quan tâm. Nếu bạn cung cấp
một dòng điện vượt qua ngưỡng cho phép, tương đương với việc làm gia tăng nhiệt độ
và làm đèn nhanh chóng bị hỏng. Dòng điện phù hợp với LED thường ở mức 10mA,
tối đa có thể tới 30mA. Chúng ta có thể kiểm soát dòng điện bằng cách đặt một điện
trở nối tiếp với đèn Led. Giúp dòng điện cấp cho đèn luôn ở mức cho phép.
Hình 2.20: Led đơn 3mm
34
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
2.5. Chế tạo mạch xử lý
Công cụ cần chuẩn bị
STT Tên Số lượng Đơn vị
1 Board đồng 1 mặt 10x10cm 1 Tấm
2 Dung dịch Axetol 500 ml
3 Giấy nhám 600 1 Tấm
4 Máy hàn 1 Chiếc
5 Thiếc hàn 1 Cuộn
6 Mỡ hàn 1 Hộp
7 Khoan cầm tay 1 Chiếc
8 Lưỡi cắt cho khoan mini 1 Chiếc
9 Mũi khoan 0.6mm 2 Chiếc
11 Mũi khoan 0.8mm 2 Chiếc
12 Găng tay cao su 1 Đôi
14 Hộp nhựa 1 Chiếc
15 Dung dịch FeCl3 500 Gam
16 Bàn là 1 Chiếc
17 Keo phủ mạch 1 Chai
Bảng 4: Công cụ chuẩn bị
2.6. Quy trình thực hiện
Các bước Nội dung thực hiện Hình ảnh quá trình làm mạch
1 In file mạch in đã thiết
kế lên giấy
Cưa mạch theo kích
thước đã chọn
*Lưu ý: sử dụng giấy in
loại mặt bóng
35
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
2 Cắt board đồng theo
kích thước mạch in
3 Dùng giấy nhám 600 đánh
thật sạch bề mặt board
đồng đã cắt
* Lưu ý: Đây là bước bắt
buộc, nếu bề mặt board
đồng không sạch mực in
sẽ không bám vào board
Ủi mạch
Mặt bóng của giấy áp vào
board đồng sau đó gấp gọn
4 các cạnh giấy.
Nhiệt độ bàn ủi để vừa vừa
để tránh làm rỗ Board
đồng hoặc cháy xém, ủi
đều tay
Ủi đến khi nào thấy lớp
mực in nó in toàn bộ
xuống lớp đồng như thế là
được.
36
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
5 Ăn mòn mạch bằng dung
dịch FeCl3.
Bỏ board mạch in vừa rồi
vào lắc đều tay. Lắc
khoảng 10-15 phút, trong
quá trình lắc nhấc mạch ra
khiển tra. Nếu thấy phần
mạch cần ăn mòn đã sạch
thì lấy board ra.
6 Dùng giấy nhám chà sạch
lại lớp mực dính.
Sau đó rửa sạch lại bằng
nước hoặc dung dịch
axetol để bề mặt board
đồng được bóng.
7 Khoan mạch trong khi làm
mạch thủ công:
Chọn mũi khoan phù hợp
với lỗ chân cắm không nên
chọn mũi to quá mất hết
phần bao của của lỗ.
*Lưu ý: mũi khoan và lỗ
khoan bé nên cần khoan
cẩn thận tránh gãy mũi,
hỏng lỗ khoan.
37
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
8 Hàn mạch
Chuẩn bị nhựa thông, mỏ
hàn, thiếc. Để nhiệt độ hàn
450°C, trước khi hàn cần
vệ sinh mỏ hàn.
Gắn linh kiện vào và hàn
theo từng loại.
*Lưu ý: thời gian hàn
không quá lâu tránh gây
bong đường mạch. Hàn
cẩn thận tránh dính thiếc
giữa các đường mạch
9 Phủ keo bảo vệ mạch tránh
mạch bị oxi hoá trong thời
gian sử dụng
Bảng 5: Các bước thực hiện làm mạch cứng
2.7. Lưu đồ thuật toán
Thuật toán này mô tả cách điều khiển tốc độ động cơ DC bằng xung PWM dùng
PIC16F887. Ban đầu cấu hình các chân I/O của PIC16F887 để điều khiển động cơ DC
và tạo xung PWM, thiết lập giá trị tần số PWM và chu kỳ PWM cho chân CCP1 và
gán speed, i=0. Tiếp theo kiểm tra điều kiện “nút bấm được nhấn”. Nếu đúng thì thực
hiện tăng tốc độ lên 100 và cấp tốc độ+1. Nếu sai thì tốc độ và cấp tốc độ không đổi và
giữ nguyên xung PWM trước đó. Sau đó kiểm tra điều kiện “Speed>900”. Nếu sai thì
sẽ quay lại điều kiện nút bấm trước đó để tăng tốc độ và cấp tốc độ, nếu đúng thì gán
lại speed và i=0. Chương trình hoạt động liên tục đến khi ngắt nguồn ra khỏi mạch
38
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.21: Lưu đồ thuật toán hệ thống
2.8 Chương trình
Công thức tính toán setup timer2 cho điều chế PWM
TPWM
TCK∗ prescaler ≤ 256(timer 2 : 8 bit )
Ở đây ta chia làm 9 cấp độ nên chu kỳ xung sẽ là 900us
Sử dụng thạch anh 16MHz qua bộ chia 4 đầu vào 1
T = =0.25(us)
CK
4 ×106
Thế vào công thức trên prescaler ≥14.06. Ta chọn bộ chia 16
Từ đó tính được value=225=≫ period =( value−1)=224
39
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 2.22: Giải thích code
2.9. Kết luận chương
Chương II đã trình bày về nội dung Thiết kế hệ thống. Tiếp theo chương III sẽ
trình bày về Kết quả
40
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
CHƯƠNG III: KẾT QUẢ
3.1. Sản phẩm đạt được
3.1.1 Quá trình thử nghiệm
Thử nghiệm cắm mạch trên board test để chọn các linh kiện phù hợp với yêu cầu.
Kiểm tra các thông số, chức năng của mạch .
Kiểm tra tính ổn định của mạch, độ bền bỉ trong quá trình hoạt động.
Hình 3.1: Test mạch trên Breadboard
3.1.2 Sản phẩm hoàn thiện
Mạch sau khi hoàn thiện được kiểm tra đầy đủ:
• Kiểm tra trạng thái các linh kiện
• Đo các thông số hoạt động so với kết quả thí nghiệm
• Ký hiệu các chức năng tương ứng cho các phần tử trên
mạch Tính thẩm mỹ
• Linh kiện được sắp xếp đều nhau, thẳng hàng, độ cao tiêu chuẩn với mạch.
• Mạch được phủ keo bóng chống oxi hoá
41
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Hình 3.2: Mặt trước mạch điều khiển sau khi hoàn thiện
Hình 3.3: Mặt sau mạch điều khiển sau khi hoàn thiện
3.1.3 Quá trình vận hành
• Mạch cần cấp nguồn cho khối điều khiển qua jack DC.
• Cấp nguồn cho động cơ theo công suất động cơ cần điều khiển vào cổng In.
42
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
• Kết nối động cơ với cổng Out. Trên mạch có ký hiệu dương (+) và âm (-), có
thể kết nối để chọn chiều thuận nghịch của động cơ theo ý muốn
Hình 3.4: Chạy phần cứng
3.2. Nhận xét
3.2.1. Ưu điểm
• Điều khiển tốc độ động cơ chính xác: PWM cho phép chỉnh tốc độ động cơ bằng
tay thay đổi chu kỳ xung và thời gian tín hiệu đầu ra trong một chu kì
• Điều khiển bằng nút ấn đơn giản: Sử dụng một nút ấn để điều khiển tốc độ động
cơ đơn giản và dễ dàng
• Chi phí thấp: Sử dụng PIC 16F887 và MOSFET/BJT giúp giảm chi phí sản xuất
và bảo trì hệ thống điều khiển tốc độ động cơ.
• Linh hoạt: Mạch sử dụng nguồn cách ly với nguồn khối điều khiển có thể linh
hoạt điều khiển các loại động cơ khác nhau hoặc mở rộng hơn là điều khiển cho
các thiết bị đèn.
3.2.2. Nhược điểm
• Độ chính xác: Phương pháp này không đảm bảo độ chính xác tuyệt đối trong
việc điều khiển tốc độ động cơ. Điều này có thể dẫn đến sự khác biệt trong tốc độ
giữa các động cơ khi được điều khiển
• Tiêu thụ năng lượng: Cách làm này tiêu phụ năng lương rất cao vì nó sử dụng
phương pháp giảm tốc độ bằng cách cắt đứt cung PWM.
• Độ trễ: Cách làm này có thể có độ trễ khi điều khiển tốc độ động cơ vì thế nó sẽ
giảm độ chính xác và tính ổn định trong việc điều khiển động cơ.
43
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
• Do sử dụng opto cách ly nên tần số xung không thể quá cao dẫn tới xung chưa
được mịn.
• Độ phức tạp: Điều khiển tốc độ bằng PWM sử dụng PIC 16F887 và
MOSFET/BJT dùng nút nhấn là cách đơn giản nhưng cần nhiều kiến thức và kỹ
năng lập trình điện tử để nâng cao trình độ
3.2.3. Giải pháp khắc phục
Có thể thay thế phương pháp cách ly opto bằng các phương pháp cách ly mới
không gây ảnh hưởng nhiều tới tần số
Cách ly RF – RF ISOLATOR
Công nghệ mới cho phép RF isolator truyền dữ liệu với tốc độ cao, điện áp cách
ly lớn, tiết kiệm điện, dòng ra tương đối. Và điều thú vị nhất, họ IC sử dụng RF
ISOLATOR có đầu vào và đầu ra ở dạng cổng logic tiêu chuẩn, bởi vậy chúng ta có
thể tiết kiệm được linh kiện và diện tích PCB so với Opto.
Cách ly từ tính
Analog divice sử dụng khớp nối từ tính để khắc phục hạn chế của Opto. Công
nghệ Coupler kết hợp các máy biến áp nhỏ với mạch điều khiển để truyền tín hiệu
bằng từ trường.
44
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
Cấu trúc cách ly của Analog Devices
Trên đây là 2 giải pháp chính, hiệu quả, tối ưu hơn phương pháp cách ly sử dụng opto.
(htt23)
3.3. Kết luận
Sau quá trình thử nghiệm, làm mạch, kiểm tra để thu được mạch thực tế: Mạch
hoạt động ổn định, vận hành tốt, đảm bảo được các chức năng theo yêu cầu thiết kế,
chương trình thuật toán hoạt động tốt.
3.4. Hướng phát triển
• Nâng cao tính ổn định và độ chính xác của hệ thống điều khiển để đạt được điều
này thì cần sử dụng cảm biến tốc độ và điều chỉnh tốc độ động cơ thông qua các
tín hiệu điều khiển phản hồi.
• Tích hợp hệ thống điều khiển với các hệ thống khác chẳng hạn như hệ thống đo
lường hoặc hệ thống kiểm soát tự động
• Tối ưu hóa mạch điện, tăng tính ổn định có thể sử dụng các công nghệ mới để tối
ưu hóa mạch điện và tăng tính ổn định của hệ thống.
45
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
TÀI LIỆU THAM KHẢO
1.
2. denledsang.vn. [Online] [Cited: 4 22, 2023.] https://denledsang.vn/kien-thuc-
tong-quan-ve-den-led-5mm-led-dip.htm.
3. dientusangtaovn. [Online] [Cited: 4 20, 2023.] https://dientusangtaovn.com/led-
7-thanh-la-gi/.
4. dientusangtaovn.com. [Online] [Cited: 4 22, 2023.]
https://dientusangtaovn.com/irf3205/.
5. https://obitvn.wordpress.com/. [Online] [Cited: 4 23, 2023.]
https://obitvn.wordpress.com/2018/07/16/thay-the-opto-chung-ta-co-gi/.
6. Nhà xuất bản Thanh Niên. 2018. Giáo trình vi điều khiển PIC Lý thuyết -
Thực hành. TP.HCM : không biết tác giả, 2018.
7. oto.edu.vn. [Online] [Cited: 4 21, 2023.] https://oto.edu.vn/tu-dien-la-gi/.
8. Tùng, Nhật. PIC16F887, Vi điều khiển. dientunhattung.com. [Online] [Cited: 4
20, 2023.] https://dientunhattung.com/product/pic16f887-vi-dieu-khien/.
9. uniduc.com. [Online] [Cited: 21 4, 2023.] https://uniduc.com/vi/blog/tu-dien.
46
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
PHỤ LỤC
1. Video kết quả thực nghiệm
https://www.youtube.com/watch?v=nBR6GJYJPns
2. Video thuyết trình bài báo cáo
https://www.youtube.com/watch?v=QOaJbelIhZE
47
Téléchargé par C?n Ph?m (phamcan211103@gmail.com)
You might also like
- 1680001368_732__templateDocument29 pages1680001368_732__templatePhuc Nguyen VanNo ratings yet
- Nhóm 2 gửi điểm phản biệnDocument4 pagesNhóm 2 gửi điểm phản biệnTrúc MaiNo ratings yet
- 4b. Vi Du de Thi Giua Ky Va Cuoi KyDocument5 pages4b. Vi Du de Thi Giua Ky Va Cuoi KyNguyen Thi Thuy TrangNo ratings yet
- FInal-project-FPGADocument14 pagesFInal-project-FPGAPhuc Nguyen VanNo ratings yet
- Bao Cao TKM Tadl1 k12Document3 pagesBao Cao TKM Tadl1 k12Thoa VũNo ratings yet
- Dự Án Cuối Kỳ HK1 - 2023-2024 - 2 - Bảng Chấm Bình DuyệtDocument2 pagesDự Án Cuối Kỳ HK1 - 2023-2024 - 2 - Bảng Chấm Bình Duyệt22126121No ratings yet
- De cuong chi tiet HP - Dung sai lap ghep va do luong ky thuat (3TC)Document7 pagesDe cuong chi tiet HP - Dung sai lap ghep va do luong ky thuat (3TC)Văn TâmNo ratings yet
- QTCL Chuong 1Document42 pagesQTCL Chuong 1Công NguyễnNo ratings yet
- 71HRMN40073 - QUẢN LÝ HIỆU QUẢ - 01,02,04,05,06,07,08 - TIEUL - de 1Document4 pages71HRMN40073 - QUẢN LÝ HIỆU QUẢ - 01,02,04,05,06,07,08 - TIEUL - de 1wicdvid2024No ratings yet
- Ngu Van - Ma Tran Cuoi Ky 1Document18 pagesNgu Van - Ma Tran Cuoi Ky 1NGUYỄN QUỐC TOÀNNo ratings yet
- De Cuong Chi Tiet HP - Dung Sai Lap Ghep Va Do Luong Ky Thuat (3TC) - 64KTCK, 64CTMDocument7 pagesDe Cuong Chi Tiet HP - Dung Sai Lap Ghep Va Do Luong Ky Thuat (3TC) - 64KTCK, 64CTMvantam3346No ratings yet
- NHÓM 2 - Bài Tập Lớn - Kỹ Xảo Phim - CNVH - TH.04 2Document37 pagesNHÓM 2 - Bài Tập Lớn - Kỹ Xảo Phim - CNVH - TH.04 2dangkhoa992003No ratings yet
- Bảng Chấm Bình DuyệtDocument2 pagesBảng Chấm Bình Duyệt22126121No ratings yet
- Báo Cáo Đ Án 1Document40 pagesBáo Cáo Đ Án 1Lê Công ThànhNo ratings yet
- đề cương học phần 1.5Document7 pagesđề cương học phần 1.5Dat DangNo ratings yet
- Ma Tran Dac Ta de Minh Hoa - Mon Toan Lop 10 - Giua Hki - NH 2023 2024Document8 pagesMa Tran Dac Ta de Minh Hoa - Mon Toan Lop 10 - Giua Hki - NH 2023 2024Diễm HằngNo ratings yet
- ĐCHP Kinh tế vĩ mô - CTĐT chuẩn - 3TC - HK2 2022-2023Document10 pagesĐCHP Kinh tế vĩ mô - CTĐT chuẩn - 3TC - HK2 2022-2023Ngân TrươngNo ratings yet
- Ma Trận - Đề Minh HọaDocument7 pagesMa Trận - Đề Minh HọaNguyễn HưngNo ratings yet
- KPI Phó Phòng Cung NGDocument5 pagesKPI Phó Phòng Cung NGIsland RockyNo ratings yet
- HD Trinh Bay Tieu LuanDocument8 pagesHD Trinh Bay Tieu LuanĐức MạnhNo ratings yet
- Bao Cao TKM Tadl1 2017-2018Document6 pagesBao Cao TKM Tadl1 2017-2018Thoa VũNo ratings yet
- TRƯỜNG ĐẠI HỌC VĂN LANGDocument4 pagesTRƯỜNG ĐẠI HỌC VĂN LANGLinh ThuyNo ratings yet
- 2005201239danh GiaDocument2 pages2005201239danh GiaMặc BăngNo ratings yet
- Nhóm 3 - 45K01.4 - Tài Chính Công Ty 1Document45 pagesNhóm 3 - 45K01.4 - Tài Chính Công Ty 1Dung LêNo ratings yet
- 07. Đề cương Kinh tế vĩ môDocument9 pages07. Đề cương Kinh tế vĩ môPhương NguyễnNo ratings yet
- Bản sao Bản sao Tiểu luận cuối kỳ NTLĐ 4ADocument37 pagesBản sao Bản sao Tiểu luận cuối kỳ NTLĐ 4ANguyễn Lê Trang TuyềnNo ratings yet
- RubricDocument11 pagesRubricGiang LêNo ratings yet
- Tiểu Luận VSATTP.3Document55 pagesTiểu Luận VSATTP.3Tuyen PhamNo ratings yet
- De Thi Giua Ki 1 Lop 7 Mon Vat Ly Truong Thcs Thang Loi Quang NinhDocument5 pagesDe Thi Giua Ki 1 Lop 7 Mon Vat Ly Truong Thcs Thang Loi Quang Ninhminh thy bui hoangNo ratings yet
- Hóa Học - Ma Trận Đề KT Giữa Kỳ I Năm 23-24Document4 pagesHóa Học - Ma Trận Đề KT Giữa Kỳ I Năm 23-24Lê Anh MịnhNo ratings yet
- Ma Trận Đề Kiểm Tra Học Kì I Năm Học 2021-2022Document1 pageMa Trận Đề Kiểm Tra Học Kì I Năm Học 2021-2022Tớ Là DươngNo ratings yet
- De Thi Hoc Ki 2Document5 pagesDe Thi Hoc Ki 2Tuyet HaNo ratings yet
- 2. Ma Tran de 10 Cơ BảnDocument2 pages2. Ma Tran de 10 Cơ BảnHải anh ĐàmNo ratings yet
- KIỂM TRA HỌC KÌ 2Document3 pagesKIỂM TRA HỌC KÌ 210 WindowsNo ratings yet
- 1.giang Vien2020Document8 pages1.giang Vien2020Hưng Nông NguyễnNo ratings yet
- Ma Trận Đề Kiểm Tra Học Kì I Năm Học 2021-2022Document1 pageMa Trận Đề Kiểm Tra Học Kì I Năm Học 2021-2022Tớ Là DươngNo ratings yet
- De Thi Giua Hoc Ki 2 Mon Toan 7 KNTT de 1Document13 pagesDe Thi Giua Hoc Ki 2 Mon Toan 7 KNTT de 1bonghoctienganhNo ratings yet
- RUBRIC Thuc Tap Dia CoDocument2 pagesRUBRIC Thuc Tap Dia CoNguyễn Lê Phúc Phượng HoàngNo ratings yet
- Rubric Quá Trình-603063 TN DT 2024Document2 pagesRubric Quá Trình-603063 TN DT 2024an.lethanhhNo ratings yet
- Rubric BCTT Cap Nhat t82023Document5 pagesRubric BCTT Cap Nhat t82023nhiemnguyen8369No ratings yet
- DR Hằng Và Dr Nam Tổng Hợp Bài GiảngDocument465 pagesDR Hằng Và Dr Nam Tổng Hợp Bài GiảngNguyễn ThuNo ratings yet
- De KT Giua Ki I KHTN 7 Day Song SongDocument9 pagesDe KT Giua Ki I KHTN 7 Day Song SongHang NguyenNo ratings yet
- Bo de Thi Giua Ki 1 Hoa Hoc Lop 10 Chan Troi Sang TaoDocument41 pagesBo de Thi Giua Ki 1 Hoa Hoc Lop 10 Chan Troi Sang Taothuy đinhNo ratings yet
- Rubric mon VHAT - 24111511007301 - Đỗ Ngọc MaiDocument3 pagesRubric mon VHAT - 24111511007301 - Đỗ Ngọc MaiNgọc MaiNo ratings yet
- ACC101 - Baocao - Hoatdong - Nhom 4 - BA1805Document10 pagesACC101 - Baocao - Hoatdong - Nhom 4 - BA1805Phát AnhNo ratings yet
- Ktgkii Anh Van 7 (22-23)Document10 pagesKtgkii Anh Van 7 (22-23)Trần Thị LoanNo ratings yet
- YÊU CẦU CỦA DỰ ÁN MÔN THỐNG KÊ 2Document3 pagesYÊU CẦU CỦA DỰ ÁN MÔN THỐNG KÊ 2HIEN HOANG LE MINHNo ratings yet
- Phân tích thống kê mô tảDocument13 pagesPhân tích thống kê mô tảthuyvan16062004No ratings yet
- Lớp 04CLC-Nhóm số 09-Bài tập nhóm MISDocument37 pagesLớp 04CLC-Nhóm số 09-Bài tập nhóm MIS28042003tienNo ratings yet
- 18 de - de Xuat Thi Vao 10Document107 pages18 de - de Xuat Thi Vao 10Minh ĐặngNo ratings yet
- đề cương học phần 1.6Document7 pagesđề cương học phần 1.6Dat DangNo ratings yet
- VEE703026 - Automotive Testing and RegistrationDocument4 pagesVEE703026 - Automotive Testing and RegistrationVyx LapNo ratings yet
- Rubric TLKNGTDK 23211511002202Document3 pagesRubric TLKNGTDK 23211511002202dangq0310No ratings yet
- Cao Thanh Trư NGDocument29 pagesCao Thanh Trư NGNguyen LoanNo ratings yet
- 23-24. Ma Tran Dac Ta - Hoa-Lop 10,11,12Document110 pages23-24. Ma Tran Dac Ta - Hoa-Lop 10,11,12HOÀNG TỬ PHÚNo ratings yet
- TTH - KTCK1 Toán 9 - 2324Document16 pagesTTH - KTCK1 Toán 9 - 2324congchuaminhha.princessNo ratings yet
- Mau-1-Rubric-Project Mon HocDocument1 pageMau-1-Rubric-Project Mon Hoc20110477No ratings yet
- Thống Kê Chi Tiêu Sinh Viên Ở Trọ Năm Nhất UFM - Nhóm 2Document26 pagesThống Kê Chi Tiêu Sinh Viên Ở Trọ Năm Nhất UFM - Nhóm 25p9sj765k4No ratings yet
- Huong dan TKMH SCMDocument5 pagesHuong dan TKMH SCMmhau6787No ratings yet