
You et al. 2018
You et al. 2018
You might also like
- Humanoid RobotsDocument13 pagesHumanoid RobotsAyush PatelNo ratings yet
- 10 1016@j Ssci 2020 104667Document19 pages10 1016@j Ssci 2020 104667walla'a yusufNo ratings yet
- Safety-Critical Advanced RobotsDocument10 pagesSafety-Critical Advanced RobotsWang JiaweiNo ratings yet
- 9.-Terzioglu PaperDocument4 pages9.-Terzioglu PaperNguyễn Đắc Học UET-No ratings yet
- 1 s2.0 S0169814121001591 MainDocument10 pages1 s2.0 S0169814121001591 MainalexandrosNo ratings yet
- Robotics and Computer-Integrated ManufacturingDocument20 pagesRobotics and Computer-Integrated Manufacturingismail khanz tvNo ratings yet
- Artigo Visão ComputacionalDocument12 pagesArtigo Visão ComputacionalRobson MelchiadesNo ratings yet
- Human-Robot Collaboration and Machine Learning - A Systematic Review of Recent ResearchDocument16 pagesHuman-Robot Collaboration and Machine Learning - A Systematic Review of Recent ResearchPiyumal SamarathungaNo ratings yet
- Safety in Human-Robot Collaborative Manufacturing EnvironmentsDocument12 pagesSafety in Human-Robot Collaborative Manufacturing EnvironmentsAnonymous IXswcnWNo ratings yet
- Sensors 2744699 Peer Review v1Document18 pagesSensors 2744699 Peer Review v1gokek29494No ratings yet
- Robotics and Computer Integrated ManufacturingDocument9 pagesRobotics and Computer Integrated ManufacturingÚrsula RuizNo ratings yet
- An Integrated Mixed Reality System ForDocument19 pagesAn Integrated Mixed Reality System ForKarthik SRSNo ratings yet
- Toward Achieving Formal Guarantees For Human-Aware Controllers in Human-Robot InteractionsDocument7 pagesToward Achieving Formal Guarantees For Human-Aware Controllers in Human-Robot InteractionsLuis SentisNo ratings yet
- MachinesDocument28 pagesMachinesMichieru5No ratings yet
- Sensors 22 06951 v2Document15 pagesSensors 22 06951 v2José Adrián Munguía RiveraNo ratings yet
- 1758 Learning Physical Collaborative Robot Behaviors From Human DemonstrationsDocument14 pages1758 Learning Physical Collaborative Robot Behaviors From Human Demonstrationsdiki athaqNo ratings yet
- Usability Guidelines For The Design of Robot Teleoperation A Taxonomy 2015Document7 pagesUsability Guidelines For The Design of Robot Teleoperation A Taxonomy 2015maría esterNo ratings yet
- Security Lapses and Related Safety Issues in Embedded Systems, RoboticsDocument10 pagesSecurity Lapses and Related Safety Issues in Embedded Systems, RoboticsAnjuman ShahNo ratings yet
- Robot CollisionDocument21 pagesRobot Collisionandrewhow1087No ratings yet
- Human Robot Interaction Research PaperDocument7 pagesHuman Robot Interaction Research Paperwlyxiqrhf100% (1)
- Human Robot CollaborationDocument3 pagesHuman Robot CollaborationSilvia ZhengNo ratings yet
- Full TextDocument20 pagesFull TextPrachit GuptaNo ratings yet
- 1 s2.0 S0007850623000951 MainDocument4 pages1 s2.0 S0007850623000951 Maingudursrinath11No ratings yet
- Metaphors To Drive By: Exploring New Ways To Guide Human - Robot InteractionDocument8 pagesMetaphors To Drive By: Exploring New Ways To Guide Human - Robot InteractionHazu WanNo ratings yet
- 1 s2.0 S2212827122001524 MainDocument6 pages1 s2.0 S2212827122001524 MainAlan AlvaradoNo ratings yet
- Multi Robot User Interface Design Based On HCI PrinciplesDocument10 pagesMulti Robot User Interface Design Based On HCI PrinciplesAI Coordinator - CSC JournalsNo ratings yet
- Sustainability 13 05990 v2Document26 pagesSustainability 13 05990 v2jchikeshNo ratings yet
- 6 Human-in-the-Loop - Embodied - Intelligence - With - Interactive - Simulation - Environment - For - Surgical - Robot - LearningDocument8 pages6 Human-in-the-Loop - Embodied - Intelligence - With - Interactive - Simulation - Environment - For - Surgical - Robot - LearningShafiq IslamNo ratings yet
- Efficient Surface Detection For Assisting Collaborative RobotsDocument7 pagesEfficient Surface Detection For Assisting Collaborative RobotsWilson NúñezNo ratings yet
- Gualtieri Et Al. Applied Erg. 2022Document15 pagesGualtieri Et Al. Applied Erg. 2022conicet.ibymeNo ratings yet
- Sensors 21 01571 v3Document29 pagesSensors 21 01571 v3Iván Sánchez BórquezNo ratings yet
- Panchetti, Et Al, 2023 - Cognitive Workload in HRCDocument15 pagesPanchetti, Et Al, 2023 - Cognitive Workload in HRCMuhammad Wasaam AliNo ratings yet
- Collaborative Flexible Robot Manipulators, A SurveyDocument13 pagesCollaborative Flexible Robot Manipulators, A SurveycianyiNo ratings yet
- Robot Operating System Based Autonomous Navigation Platform With Human Robot InteractionDocument9 pagesRobot Operating System Based Autonomous Navigation Platform With Human Robot InteractionTELKOMNIKA100% (1)
- Balancing Collaborative Human-Robot Assembly 1Document38 pagesBalancing Collaborative Human-Robot Assembly 1John Christian AgdamagNo ratings yet
- AI EssayDocument3 pagesAI EssayMuhammad UsamaNo ratings yet
- Paper Cobot 1Document8 pagesPaper Cobot 1Jessica NovitaNo ratings yet
- Haseeb - Final Research ReportDocument11 pagesHaseeb - Final Research Reportkrishnachandu6561No ratings yet
- A Deep Learning-Enhanced Digital Twin Framework For Improving Safety and Reliability in Human-Robot Collaborative ManufacturingDocument15 pagesA Deep Learning-Enhanced Digital Twin Framework For Improving Safety and Reliability in Human-Robot Collaborative ManufacturingNacsa JánosNo ratings yet
- Action Recognition Cogs YsDocument8 pagesAction Recognition Cogs YsHiago BatistaNo ratings yet
- Electronics: Cognitive Interaction Analysis in Human-Robot Collaboration Using An Assembly TaskDocument19 pagesElectronics: Cognitive Interaction Analysis in Human-Robot Collaboration Using An Assembly Taskmahnoor buttNo ratings yet
- Towards Safety in Human Robot InteractionDocument4 pagesTowards Safety in Human Robot Interactiontran the baoNo ratings yet
- Safety For Mobile Robotic Systems A Systematic Mapping Study From A Software Engineering PerspectiveDocument30 pagesSafety For Mobile Robotic Systems A Systematic Mapping Study From A Software Engineering PerspectiveAaqibRNo ratings yet
- Hands-Free Interaction in Immersive Virtual Reality: A Systematic ReviewDocument13 pagesHands-Free Interaction in Immersive Virtual Reality: A Systematic ReviewVIJAY ANANDNo ratings yet
- Paper 01 CoBot Intro and SpecsDocument9 pagesPaper 01 CoBot Intro and SpecsJiggaNo ratings yet
- Autonomous Navigation by Mobile Robots in Human Environments A SurveyDocument6 pagesAutonomous Navigation by Mobile Robots in Human Environments A Surveymarshadakhtar84No ratings yet
- Toichoaeyam 2021Document21 pagesToichoaeyam 2021pipilepew14No ratings yet
- IEEE-Advancing Safety and Efficiency in Human-Robot InteractionDocument8 pagesIEEE-Advancing Safety and Efficiency in Human-Robot Interactionm zubairNo ratings yet
- Real-Time Mixed Reality-Based Visual Warning For Construction Workforce Safety - 2022Document17 pagesReal-Time Mixed Reality-Based Visual Warning For Construction Workforce Safety - 2022yazhini shanmugamNo ratings yet
- Safeguarding and Supporting Future RobotDocument8 pagesSafeguarding and Supporting Future RobotDokajanNo ratings yet
- Design and Analysis On Robotic Arm For Serving Hazard ContainerDocument10 pagesDesign and Analysis On Robotic Arm For Serving Hazard ContainerEmmanuel KutaniNo ratings yet
- A Hybrid Collaborative Operation For Human-Robot Interaction Supported by Machine Learning PDFDocument7 pagesA Hybrid Collaborative Operation For Human-Robot Interaction Supported by Machine Learning PDF林昌樺No ratings yet
- An Integrated Planning and Programming System For HumanRobotCooperationDocument6 pagesAn Integrated Planning and Programming System For HumanRobotCooperationKarthik SRSNo ratings yet
- Intelligent Cobot Systems: Human-Cobot Collaboration in ManufacturingDocument3 pagesIntelligent Cobot Systems: Human-Cobot Collaboration in ManufacturingWilson NúñezNo ratings yet
- A Survey On Deep Reinforcement Learning Algorithms For Robotic ManipulationDocument35 pagesA Survey On Deep Reinforcement Learning Algorithms For Robotic ManipulationHiền XuânNo ratings yet
- Computer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloDocument13 pagesComputer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloSudheer KumarNo ratings yet
- Human-Robot Motion Control Application With ArtifiDocument13 pagesHuman-Robot Motion Control Application With ArtifiEsteban ReyesNo ratings yet
- Int J Industrial Ergonomics Version FinaleDocument16 pagesInt J Industrial Ergonomics Version FinaleThảo DươngNo ratings yet
- Comunication Human-RobotsDocument42 pagesComunication Human-RobotsAndreeaNo ratings yet
- Building Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)From EverandBuilding Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)No ratings yet
- The New Frontier Agile Automation at ScaleDocument5 pagesThe New Frontier Agile Automation at ScaleMarie IriarteNo ratings yet
- Endurance Conductivity Sensors: Model 400 SeriesDocument12 pagesEndurance Conductivity Sensors: Model 400 SeriesMiregnis MoyaNo ratings yet
- Ux Web Build WebsitesDocument376 pagesUx Web Build WebsitesFrederico MoianaNo ratings yet
- Aadhaar Update Form: Aadhaar Enrolment Is Free & VoluntaryDocument4 pagesAadhaar Update Form: Aadhaar Enrolment Is Free & VoluntaryyogeshNo ratings yet
- Voltage Generation: Using Kamias Juice As ElectrolyteDocument32 pagesVoltage Generation: Using Kamias Juice As Electrolytejayson albert escabarte75% (12)
- Manual de Partes de Daytona 350Document66 pagesManual de Partes de Daytona 350Alejandro LucNo ratings yet
- Manual DXH 560 HEMATOLOGIADocument142 pagesManual DXH 560 HEMATOLOGIAcpd100% (2)
- P633 OrderForm - v52 - 112021Document14 pagesP633 OrderForm - v52 - 112021keglobalNo ratings yet
- BUSI23046Document10 pagesBUSI23046Huda Tariq/ELD Facilitator/BCR/SG3No ratings yet
- Faq BessDocument2 pagesFaq Besssarip83No ratings yet
- Command Line Basics - Everything CurlDocument2 pagesCommand Line Basics - Everything Curlnot hereNo ratings yet
- CSCI335 SampleFinalExamDocument7 pagesCSCI335 SampleFinalExamyaacoubsalame85No ratings yet
- Science Technology and Society and The Human Condition Part 2Document8 pagesScience Technology and Society and The Human Condition Part 2CRISTY C. MANALONo ratings yet
- RAW DATA US 2020 Election Interference ItalyDocument39 pagesRAW DATA US 2020 Election Interference ItalyDGB DGB100% (1)
- Cyber Security Module 1 Lesson 3 NotesDocument20 pagesCyber Security Module 1 Lesson 3 NotesAnshpreet SinghNo ratings yet
- Euronorm 186-87Document4 pagesEuronorm 186-87Pedro OliveiraNo ratings yet
- Tally Project 1Document31 pagesTally Project 1dhruba dasNo ratings yet
- Nukeproof Headset Technical ManualDocument5 pagesNukeproof Headset Technical ManualNicky KiloNo ratings yet
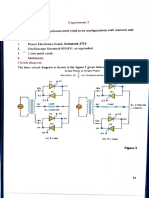
- Objective:: Study Single Phase Cycloconverter Point Configuration)Document4 pagesObjective:: Study Single Phase Cycloconverter Point Configuration)Mukesh Kumar BeheraNo ratings yet
- 01 Paytm BMCDocument3 pages01 Paytm BMCjai katiyarNo ratings yet
- Unitised Facade With AcpDocument3 pagesUnitised Facade With AcpVISHAL - CONQUÉRANTNo ratings yet
- Maximum Anniversary Budget PlanDocument22 pagesMaximum Anniversary Budget PlanClaudya JeannyferNo ratings yet
- Pace LLL: By: Mherle Andriande Capuchino MM-3 A-1Document8 pagesPace LLL: By: Mherle Andriande Capuchino MM-3 A-1Aline Aprille Capuchino MendezNo ratings yet
- VRV Condensing UnitDocument24 pagesVRV Condensing UnitLeo NgNo ratings yet
- Course Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionDocument23 pagesCourse Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionMarjorie MalvedaNo ratings yet
- IBM ILOG CPLEX Optimization Studio Getting Started With CPLEX For MATLABDocument34 pagesIBM ILOG CPLEX Optimization Studio Getting Started With CPLEX For MATLABmudaserNo ratings yet
- ABB Indoor Vacuum Contactors VSCDocument51 pagesABB Indoor Vacuum Contactors VSCadrianoNo ratings yet
- Computer System Servicing 10 w1 2Document43 pagesComputer System Servicing 10 w1 2Catherine IlaganNo ratings yet
- 04 Descriptive AnalysisDocument60 pages04 Descriptive AnalysisDavidVegasDelCastilloNo ratings yet
- Python Quick Guide - TutorialspointDocument199 pagesPython Quick Guide - TutorialspointMayank DeshpandeNo ratings yet
























































































Download as pdf or txt
You might also like
- Humanoid RobotsDocument13 pagesHumanoid RobotsAyush PatelNo ratings yet
- 10 1016@j Ssci 2020 104667Document19 pages10 1016@j Ssci 2020 104667walla'a yusufNo ratings yet
- Safety-Critical Advanced RobotsDocument10 pagesSafety-Critical Advanced RobotsWang JiaweiNo ratings yet
- 9.-Terzioglu PaperDocument4 pages9.-Terzioglu PaperNguyễn Đắc Học UET-No ratings yet
- 1 s2.0 S0169814121001591 MainDocument10 pages1 s2.0 S0169814121001591 MainalexandrosNo ratings yet
- Robotics and Computer-Integrated ManufacturingDocument20 pagesRobotics and Computer-Integrated Manufacturingismail khanz tvNo ratings yet
- Artigo Visão ComputacionalDocument12 pagesArtigo Visão ComputacionalRobson MelchiadesNo ratings yet
- Human-Robot Collaboration and Machine Learning - A Systematic Review of Recent ResearchDocument16 pagesHuman-Robot Collaboration and Machine Learning - A Systematic Review of Recent ResearchPiyumal SamarathungaNo ratings yet
- Safety in Human-Robot Collaborative Manufacturing EnvironmentsDocument12 pagesSafety in Human-Robot Collaborative Manufacturing EnvironmentsAnonymous IXswcnWNo ratings yet
- Sensors 2744699 Peer Review v1Document18 pagesSensors 2744699 Peer Review v1gokek29494No ratings yet
- Robotics and Computer Integrated ManufacturingDocument9 pagesRobotics and Computer Integrated ManufacturingÚrsula RuizNo ratings yet
- An Integrated Mixed Reality System ForDocument19 pagesAn Integrated Mixed Reality System ForKarthik SRSNo ratings yet
- Toward Achieving Formal Guarantees For Human-Aware Controllers in Human-Robot InteractionsDocument7 pagesToward Achieving Formal Guarantees For Human-Aware Controllers in Human-Robot InteractionsLuis SentisNo ratings yet
- MachinesDocument28 pagesMachinesMichieru5No ratings yet
- Sensors 22 06951 v2Document15 pagesSensors 22 06951 v2José Adrián Munguía RiveraNo ratings yet
- 1758 Learning Physical Collaborative Robot Behaviors From Human DemonstrationsDocument14 pages1758 Learning Physical Collaborative Robot Behaviors From Human Demonstrationsdiki athaqNo ratings yet
- Usability Guidelines For The Design of Robot Teleoperation A Taxonomy 2015Document7 pagesUsability Guidelines For The Design of Robot Teleoperation A Taxonomy 2015maría esterNo ratings yet
- Security Lapses and Related Safety Issues in Embedded Systems, RoboticsDocument10 pagesSecurity Lapses and Related Safety Issues in Embedded Systems, RoboticsAnjuman ShahNo ratings yet
- Robot CollisionDocument21 pagesRobot Collisionandrewhow1087No ratings yet
- Human Robot Interaction Research PaperDocument7 pagesHuman Robot Interaction Research Paperwlyxiqrhf100% (1)
- Human Robot CollaborationDocument3 pagesHuman Robot CollaborationSilvia ZhengNo ratings yet
- Full TextDocument20 pagesFull TextPrachit GuptaNo ratings yet
- 1 s2.0 S0007850623000951 MainDocument4 pages1 s2.0 S0007850623000951 Maingudursrinath11No ratings yet
- Metaphors To Drive By: Exploring New Ways To Guide Human - Robot InteractionDocument8 pagesMetaphors To Drive By: Exploring New Ways To Guide Human - Robot InteractionHazu WanNo ratings yet
- 1 s2.0 S2212827122001524 MainDocument6 pages1 s2.0 S2212827122001524 MainAlan AlvaradoNo ratings yet
- Multi Robot User Interface Design Based On HCI PrinciplesDocument10 pagesMulti Robot User Interface Design Based On HCI PrinciplesAI Coordinator - CSC JournalsNo ratings yet
- Sustainability 13 05990 v2Document26 pagesSustainability 13 05990 v2jchikeshNo ratings yet
- 6 Human-in-the-Loop - Embodied - Intelligence - With - Interactive - Simulation - Environment - For - Surgical - Robot - LearningDocument8 pages6 Human-in-the-Loop - Embodied - Intelligence - With - Interactive - Simulation - Environment - For - Surgical - Robot - LearningShafiq IslamNo ratings yet
- Efficient Surface Detection For Assisting Collaborative RobotsDocument7 pagesEfficient Surface Detection For Assisting Collaborative RobotsWilson NúñezNo ratings yet
- Gualtieri Et Al. Applied Erg. 2022Document15 pagesGualtieri Et Al. Applied Erg. 2022conicet.ibymeNo ratings yet
- Sensors 21 01571 v3Document29 pagesSensors 21 01571 v3Iván Sánchez BórquezNo ratings yet
- Panchetti, Et Al, 2023 - Cognitive Workload in HRCDocument15 pagesPanchetti, Et Al, 2023 - Cognitive Workload in HRCMuhammad Wasaam AliNo ratings yet
- Collaborative Flexible Robot Manipulators, A SurveyDocument13 pagesCollaborative Flexible Robot Manipulators, A SurveycianyiNo ratings yet
- Robot Operating System Based Autonomous Navigation Platform With Human Robot InteractionDocument9 pagesRobot Operating System Based Autonomous Navigation Platform With Human Robot InteractionTELKOMNIKA100% (1)
- Balancing Collaborative Human-Robot Assembly 1Document38 pagesBalancing Collaborative Human-Robot Assembly 1John Christian AgdamagNo ratings yet
- AI EssayDocument3 pagesAI EssayMuhammad UsamaNo ratings yet
- Paper Cobot 1Document8 pagesPaper Cobot 1Jessica NovitaNo ratings yet
- Haseeb - Final Research ReportDocument11 pagesHaseeb - Final Research Reportkrishnachandu6561No ratings yet
- A Deep Learning-Enhanced Digital Twin Framework For Improving Safety and Reliability in Human-Robot Collaborative ManufacturingDocument15 pagesA Deep Learning-Enhanced Digital Twin Framework For Improving Safety and Reliability in Human-Robot Collaborative ManufacturingNacsa JánosNo ratings yet
- Action Recognition Cogs YsDocument8 pagesAction Recognition Cogs YsHiago BatistaNo ratings yet
- Electronics: Cognitive Interaction Analysis in Human-Robot Collaboration Using An Assembly TaskDocument19 pagesElectronics: Cognitive Interaction Analysis in Human-Robot Collaboration Using An Assembly Taskmahnoor buttNo ratings yet
- Towards Safety in Human Robot InteractionDocument4 pagesTowards Safety in Human Robot Interactiontran the baoNo ratings yet
- Safety For Mobile Robotic Systems A Systematic Mapping Study From A Software Engineering PerspectiveDocument30 pagesSafety For Mobile Robotic Systems A Systematic Mapping Study From A Software Engineering PerspectiveAaqibRNo ratings yet
- Hands-Free Interaction in Immersive Virtual Reality: A Systematic ReviewDocument13 pagesHands-Free Interaction in Immersive Virtual Reality: A Systematic ReviewVIJAY ANANDNo ratings yet
- Paper 01 CoBot Intro and SpecsDocument9 pagesPaper 01 CoBot Intro and SpecsJiggaNo ratings yet
- Autonomous Navigation by Mobile Robots in Human Environments A SurveyDocument6 pagesAutonomous Navigation by Mobile Robots in Human Environments A Surveymarshadakhtar84No ratings yet
- Toichoaeyam 2021Document21 pagesToichoaeyam 2021pipilepew14No ratings yet
- IEEE-Advancing Safety and Efficiency in Human-Robot InteractionDocument8 pagesIEEE-Advancing Safety and Efficiency in Human-Robot Interactionm zubairNo ratings yet
- Real-Time Mixed Reality-Based Visual Warning For Construction Workforce Safety - 2022Document17 pagesReal-Time Mixed Reality-Based Visual Warning For Construction Workforce Safety - 2022yazhini shanmugamNo ratings yet
- Safeguarding and Supporting Future RobotDocument8 pagesSafeguarding and Supporting Future RobotDokajanNo ratings yet
- Design and Analysis On Robotic Arm For Serving Hazard ContainerDocument10 pagesDesign and Analysis On Robotic Arm For Serving Hazard ContainerEmmanuel KutaniNo ratings yet
- A Hybrid Collaborative Operation For Human-Robot Interaction Supported by Machine Learning PDFDocument7 pagesA Hybrid Collaborative Operation For Human-Robot Interaction Supported by Machine Learning PDF林昌樺No ratings yet
- An Integrated Planning and Programming System For HumanRobotCooperationDocument6 pagesAn Integrated Planning and Programming System For HumanRobotCooperationKarthik SRSNo ratings yet
- Intelligent Cobot Systems: Human-Cobot Collaboration in ManufacturingDocument3 pagesIntelligent Cobot Systems: Human-Cobot Collaboration in ManufacturingWilson NúñezNo ratings yet
- A Survey On Deep Reinforcement Learning Algorithms For Robotic ManipulationDocument35 pagesA Survey On Deep Reinforcement Learning Algorithms For Robotic ManipulationHiền XuânNo ratings yet
- Computer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloDocument13 pagesComputer Vision and Image Understanding: Gerard Canal, Sergio Escalera, Cecilio AnguloSudheer KumarNo ratings yet
- Human-Robot Motion Control Application With ArtifiDocument13 pagesHuman-Robot Motion Control Application With ArtifiEsteban ReyesNo ratings yet
- Int J Industrial Ergonomics Version FinaleDocument16 pagesInt J Industrial Ergonomics Version FinaleThảo DươngNo ratings yet
- Comunication Human-RobotsDocument42 pagesComunication Human-RobotsAndreeaNo ratings yet
- Building Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)From EverandBuilding Smart Robots Using ROS: Design, Build, Simulate, Prototype and Control Smart Robots Using ROS, Machine Learning and React Native Platform (English Edition)No ratings yet
- The New Frontier Agile Automation at ScaleDocument5 pagesThe New Frontier Agile Automation at ScaleMarie IriarteNo ratings yet
- Endurance Conductivity Sensors: Model 400 SeriesDocument12 pagesEndurance Conductivity Sensors: Model 400 SeriesMiregnis MoyaNo ratings yet
- Ux Web Build WebsitesDocument376 pagesUx Web Build WebsitesFrederico MoianaNo ratings yet
- Aadhaar Update Form: Aadhaar Enrolment Is Free & VoluntaryDocument4 pagesAadhaar Update Form: Aadhaar Enrolment Is Free & VoluntaryyogeshNo ratings yet
- Voltage Generation: Using Kamias Juice As ElectrolyteDocument32 pagesVoltage Generation: Using Kamias Juice As Electrolytejayson albert escabarte75% (12)
- Manual de Partes de Daytona 350Document66 pagesManual de Partes de Daytona 350Alejandro LucNo ratings yet
- Manual DXH 560 HEMATOLOGIADocument142 pagesManual DXH 560 HEMATOLOGIAcpd100% (2)
- P633 OrderForm - v52 - 112021Document14 pagesP633 OrderForm - v52 - 112021keglobalNo ratings yet
- BUSI23046Document10 pagesBUSI23046Huda Tariq/ELD Facilitator/BCR/SG3No ratings yet
- Faq BessDocument2 pagesFaq Besssarip83No ratings yet
- Command Line Basics - Everything CurlDocument2 pagesCommand Line Basics - Everything Curlnot hereNo ratings yet
- CSCI335 SampleFinalExamDocument7 pagesCSCI335 SampleFinalExamyaacoubsalame85No ratings yet
- Science Technology and Society and The Human Condition Part 2Document8 pagesScience Technology and Society and The Human Condition Part 2CRISTY C. MANALONo ratings yet
- RAW DATA US 2020 Election Interference ItalyDocument39 pagesRAW DATA US 2020 Election Interference ItalyDGB DGB100% (1)
- Cyber Security Module 1 Lesson 3 NotesDocument20 pagesCyber Security Module 1 Lesson 3 NotesAnshpreet SinghNo ratings yet
- Euronorm 186-87Document4 pagesEuronorm 186-87Pedro OliveiraNo ratings yet
- Tally Project 1Document31 pagesTally Project 1dhruba dasNo ratings yet
- Nukeproof Headset Technical ManualDocument5 pagesNukeproof Headset Technical ManualNicky KiloNo ratings yet
- Objective:: Study Single Phase Cycloconverter Point Configuration)Document4 pagesObjective:: Study Single Phase Cycloconverter Point Configuration)Mukesh Kumar BeheraNo ratings yet
- 01 Paytm BMCDocument3 pages01 Paytm BMCjai katiyarNo ratings yet
- Unitised Facade With AcpDocument3 pagesUnitised Facade With AcpVISHAL - CONQUÉRANTNo ratings yet
- Maximum Anniversary Budget PlanDocument22 pagesMaximum Anniversary Budget PlanClaudya JeannyferNo ratings yet
- Pace LLL: By: Mherle Andriande Capuchino MM-3 A-1Document8 pagesPace LLL: By: Mherle Andriande Capuchino MM-3 A-1Aline Aprille Capuchino MendezNo ratings yet
- VRV Condensing UnitDocument24 pagesVRV Condensing UnitLeo NgNo ratings yet
- Course Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionDocument23 pagesCourse Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionMarjorie MalvedaNo ratings yet
- IBM ILOG CPLEX Optimization Studio Getting Started With CPLEX For MATLABDocument34 pagesIBM ILOG CPLEX Optimization Studio Getting Started With CPLEX For MATLABmudaserNo ratings yet
- ABB Indoor Vacuum Contactors VSCDocument51 pagesABB Indoor Vacuum Contactors VSCadrianoNo ratings yet
- Computer System Servicing 10 w1 2Document43 pagesComputer System Servicing 10 w1 2Catherine IlaganNo ratings yet
- 04 Descriptive AnalysisDocument60 pages04 Descriptive AnalysisDavidVegasDelCastilloNo ratings yet
- Python Quick Guide - TutorialspointDocument199 pagesPython Quick Guide - TutorialspointMayank DeshpandeNo ratings yet