Download as pdf or txt
You might also like
- Real-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningDocument6 pagesReal-Time Image Processing Algorithms For Object and Distances Identification in Mobile Robot Trajectory PlanningamitsbhatiNo ratings yet
- Research On Collision Detection Algorithm Based On AABB-OBB Bounding VolumeDocument3 pagesResearch On Collision Detection Algorithm Based On AABB-OBB Bounding VolumeSachin GNo ratings yet
- DownloadDocument8 pagesDownloadJuan Camilo ParejaNo ratings yet
- Inteligencia Artificial: (66) (2020), 1-8 Doi: 10.4114/intartf - Vol23iss66pp1-8Document8 pagesInteligencia Artificial: (66) (2020), 1-8 Doi: 10.4114/intartf - Vol23iss66pp1-8Sebastian Vallejo RangelNo ratings yet
- Generalized Hough Transform: Fast Detection For Hybrid Multi-Circle and Multi-RectangleDocument5 pagesGeneralized Hough Transform: Fast Detection For Hybrid Multi-Circle and Multi-Rectanglemsdn12000No ratings yet
- BVH For CDDocument12 pagesBVH For CDSiti Hasnah Mea TanalolNo ratings yet
- 3D Collision Detection Algorithm Based On Composite Balanced Binary Bounding Box TreeDocument6 pages3D Collision Detection Algorithm Based On Composite Balanced Binary Bounding Box TreeJean GrimNo ratings yet
- Region Covariance Based Object Tracking Using Monte Carlo MethodDocument4 pagesRegion Covariance Based Object Tracking Using Monte Carlo MethodVasuhi SamyduraiNo ratings yet
- 2015WimoTriangleTrianglePublished PDFDocument9 pages2015WimoTriangleTrianglePublished PDFAlexgh1993No ratings yet
- Single Camera 3D-Particle Tracking VelocimetryDocument6 pagesSingle Camera 3D-Particle Tracking VelocimetryArcangel Dragon SerpienteNo ratings yet
- Multi-Sub-Swarm PSO Classifier Design and Rule Extraction: Yanwei Chang Guofang YuDocument4 pagesMulti-Sub-Swarm PSO Classifier Design and Rule Extraction: Yanwei Chang Guofang Yumarcio pivelloNo ratings yet
- Curve-Skeleton Applications: Nicu D. Cornea Deborah Silver Patrick MinDocument8 pagesCurve-Skeleton Applications: Nicu D. Cornea Deborah Silver Patrick MinGrace ANo ratings yet
- FRP PDFDocument19 pagesFRP PDFmsl_cspNo ratings yet
- Computer GraphicsDocument14 pagesComputer Graphicsgirum sisayNo ratings yet
- MATS2003 Final Exam 2015 Example Solutions For Students in 2016Document10 pagesMATS2003 Final Exam 2015 Example Solutions For Students in 2016Meena LochniNo ratings yet
- Position, Rotation, and SC Ale-Invariant Recognition OF 2-Dimensional Objects Using A Gradient Coding SchemeDocument6 pagesPosition, Rotation, and SC Ale-Invariant Recognition OF 2-Dimensional Objects Using A Gradient Coding Schemekalahassa123No ratings yet
- Project Report On Contour DetectionDocument10 pagesProject Report On Contour DetectionRaghav GuptaNo ratings yet
- A Recognition System For 3D Embossed Digits On Non-Smooth Metallic SurfaceDocument6 pagesA Recognition System For 3D Embossed Digits On Non-Smooth Metallic SurfaceselimolojiNo ratings yet
- 3D Interaction On The Augmented Reality EnvironmentDocument7 pages3D Interaction On The Augmented Reality Environmentaminudin2008No ratings yet
- Computer Graphics (ECS-504) 2011-12-2Document4 pagesComputer Graphics (ECS-504) 2011-12-2Ajay YadavNo ratings yet
- Mitsyn Ososkov Optical Memory NeurGasDocument11 pagesMitsyn Ososkov Optical Memory NeurGasГеннадий ОсосковNo ratings yet
- Cit371 PQ AnsDocument4 pagesCit371 PQ AnsdaylbelinaNo ratings yet
- Aircraft Recognition in High Resolution Satellite Images: P.C.Hemalatha, Mrs.M.Anitha M.E.Document5 pagesAircraft Recognition in High Resolution Satellite Images: P.C.Hemalatha, Mrs.M.Anitha M.E.theijesNo ratings yet
- 3D Reconstruction of Face: A Comparison of Marching Cube and Improved Marching Cube AlgorithmDocument4 pages3D Reconstruction of Face: A Comparison of Marching Cube and Improved Marching Cube AlgorithmKarthik RNo ratings yet
- BIRCH Cluster For Time SeriesDocument5 pagesBIRCH Cluster For Time SeriesyurimazurNo ratings yet
- Novel Design of Quantum Circuits For RepresentatioDocument8 pagesNovel Design of Quantum Circuits For Representatiovivek vermaNo ratings yet
- Solving The Pose Ambiguity Via A Simple Concentric Circle ConstraintDocument11 pagesSolving The Pose Ambiguity Via A Simple Concentric Circle ConstraintIJEMR JournalNo ratings yet
- Cornernet: Detecting Objects As Paired KeypointsDocument17 pagesCornernet: Detecting Objects As Paired KeypointsCongyao ZhengNo ratings yet
- Review Article: Review and Comparison of High-Dynamic Range Three-Dimensional Shape Measurement TechniquesDocument12 pagesReview Article: Review and Comparison of High-Dynamic Range Three-Dimensional Shape Measurement TechniquesShadi AtriNo ratings yet
- Automatic Detection of Welding Defects Using Deep PDFDocument11 pagesAutomatic Detection of Welding Defects Using Deep PDFahmadNo ratings yet
- ANA Projects ListDocument44 pagesANA Projects ListRaul GarciaNo ratings yet
- Cubical Homology in Digital ImagesDocument10 pagesCubical Homology in Digital ImagesSEP-PublisherNo ratings yet
- BurmesterRivestShamir Geometric - PsDocument7 pagesBurmesterRivestShamir Geometric - PsAbxNo ratings yet
- Adrian Sabin Popescu - Knot Based Large Scale Structure CodeDocument5 pagesAdrian Sabin Popescu - Knot Based Large Scale Structure CodePogz1995No ratings yet
- Magnetic Eye TrackingDocument7 pagesMagnetic Eye Trackinghub23No ratings yet
- FY BTech - AS - Engineering Physics - SEM-I - Apr 2023Document4 pagesFY BTech - AS - Engineering Physics - SEM-I - Apr 2023kumbhalkarvalay8No ratings yet
- Elliptical TrajectoryDocument3 pagesElliptical TrajectoryMostafaKamelNo ratings yet
- Hierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingDocument5 pagesHierarchical Vertebral Body Segmentation Using Graph Cuts and Statistical Shape ModellingijtetjournalNo ratings yet
- Detection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsDocument6 pagesDetection and Tracking of The Vanishing Point On A Horizon For Automotive ApplicationsMounir El MaghraouiNo ratings yet
- A Vertex Chain Code Approach For Image RecognitionDocument8 pagesA Vertex Chain Code Approach For Image Recognitionatchyutakiran428No ratings yet
- Cos340june11 Paper MemoDocument12 pagesCos340june11 Paper MemoNeli MkhatshwaNo ratings yet
- Mikulski Stanislaw Laser 11Document7 pagesMikulski Stanislaw Laser 11NuegatteNo ratings yet
- A Vertex Chain Code Approach For Image Recognition: ICGST-GVIP Journal, Volume 5, Issue3, March 2005Document8 pagesA Vertex Chain Code Approach For Image Recognition: ICGST-GVIP Journal, Volume 5, Issue3, March 2005Marguerite FlowerNo ratings yet
- Recognition Using Curvature Scale Space and Artificial Neural NetworksDocument6 pagesRecognition Using Curvature Scale Space and Artificial Neural NetworksMuthu Vijay DeepakNo ratings yet
- 10.1.1.464.3408 VoronoiDocument32 pages10.1.1.464.3408 Voronoisoumya mondalNo ratings yet
- Presentation Title: Subheading Goes HereDocument54 pagesPresentation Title: Subheading Goes HereAhmed HwaidiNo ratings yet
- A Novel 3D Skeleton Algorithm Based On Neutrosophic Cost FunctionDocument8 pagesA Novel 3D Skeleton Algorithm Based On Neutrosophic Cost FunctionMia AmaliaNo ratings yet
- An Electromagnetic Compatibility Problem Via UnscentedDocument8 pagesAn Electromagnetic Compatibility Problem Via Unscentedxenaman17No ratings yet
- Efficient Spatio-Temporal Data Association Using Multidimensional Assignment For Multi-Camera Multi-Target TrackingDocument12 pagesEfficient Spatio-Temporal Data Association Using Multidimensional Assignment For Multi-Camera Multi-Target TrackingMaik ShefferNo ratings yet
- Tam 1998Document11 pagesTam 1998marito’No ratings yet
- Single-View Geometry of A Rectangle With Application To Whiteboard Image RectificationDocument7 pagesSingle-View Geometry of A Rectangle With Application To Whiteboard Image RectificationRazvan PistoleaNo ratings yet
- Huang 2019 Spatiotemp NetsDocument9 pagesHuang 2019 Spatiotemp NetsKatelinmortNo ratings yet
- Article 5 2023Document12 pagesArticle 5 2023Morshed Bin shirajNo ratings yet
- Sphericity and Roundness Computation For ParticlesDocument13 pagesSphericity and Roundness Computation For Particlesdeena adleenaNo ratings yet
- 2018-Efficient GPU-based Monte-Carlo Simulation of Diffusion in Real Astrocytes Reconstructed From Confocal MicrosDocument12 pages2018-Efficient GPU-based Monte-Carlo Simulation of Diffusion in Real Astrocytes Reconstructed From Confocal MicrosnvkhieuNo ratings yet
- Object Detection and Classification Using Yolov3 IJERTV10IS020078Document6 pagesObject Detection and Classification Using Yolov3 IJERTV10IS020078ikhwancules46No ratings yet
- 669Document12 pages669Will CorleoneNo ratings yet
- Chaotic Scan - Dogaru2010Document5 pagesChaotic Scan - Dogaru2010phongdv107No ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- Bounding Volume: Exploring Spatial Representation in Computer VisionFrom EverandBounding Volume: Exploring Spatial Representation in Computer VisionNo ratings yet
- Digital Logic Circuits Objective Questions PDFDocument9 pagesDigital Logic Circuits Objective Questions PDFNoor AhmedNo ratings yet
- Lonely RunnerDocument8 pagesLonely RunnerchakarriNo ratings yet
- CAPE Physics MCQ - Answer KeyDocument54 pagesCAPE Physics MCQ - Answer KeyShafiqueDeshongNo ratings yet
- Myers O ND DiferenceDocument16 pagesMyers O ND DiferenceObelix1789No ratings yet
- BS Physics PDFDocument28 pagesBS Physics PDFNasir khanNo ratings yet
- Mathematical SymbolsDocument21 pagesMathematical SymbolsShah AlamNo ratings yet
- Cours Acide-Base en English PDFDocument22 pagesCours Acide-Base en English PDFالغزيزال الحسن EL GHZIZAL HassaneNo ratings yet
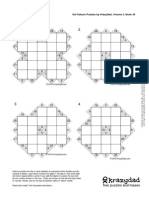
- KD Kakuro 5x5 v3 s2 b045Document3 pagesKD Kakuro 5x5 v3 s2 b045RADU GABINo ratings yet
- Unit 4 - Order of OperationDocument1 pageUnit 4 - Order of OperationEmz GelogoNo ratings yet
- Hybrid Numerical-Asymptotic Modeling of Electrically Large EM StructuresDocument4 pagesHybrid Numerical-Asymptotic Modeling of Electrically Large EM StructuresTháiCựcKiếmNo ratings yet
- Aqa 8403 Es Jun13Document4 pagesAqa 8403 Es Jun13dadajee420No ratings yet
- Pyton ExercisesDocument41 pagesPyton ExerciseskosacarNo ratings yet
- Problem Set 3 New SolutionsDocument5 pagesProblem Set 3 New Solutionsapi-235832666No ratings yet
- Refraction at Plane Surfaces Report To FinalDocument13 pagesRefraction at Plane Surfaces Report To FinalProy DC100% (1)
- CBC Monitor: Inter-Laboratory Comparison ProgramDocument10 pagesCBC Monitor: Inter-Laboratory Comparison ProgramgeohhhNo ratings yet
- Surprises TestDocument7 pagesSurprises TestneoisonlyoneNo ratings yet
- Law of InertiaDocument1 pageLaw of InertiaRho Dz100% (1)
- Higher Eng Maths 9th Ed 2021 Solutions ChapterDocument17 pagesHigher Eng Maths 9th Ed 2021 Solutions ChapterAubrey JosephNo ratings yet
- Vortex EnergyDocument15 pagesVortex Energysensorseeker100% (1)
- Course PlanDocument1 pageCourse Planparivesh16No ratings yet
- 2.HCF &LCM2Document22 pages2.HCF &LCM2Arunachalam NarayananNo ratings yet
- HL Paper1Document15 pagesHL Paper1Soham MishraNo ratings yet
- C++ Code For Classic Algorithms: Dijkstra's AlgoDocument4 pagesC++ Code For Classic Algorithms: Dijkstra's AlgoPraveen MishraNo ratings yet
- DDD Star HomDocument5 pagesDDD Star HomDumitru D. DRAGHIANo ratings yet
- 7232 24911 1 SM PDFDocument8 pages7232 24911 1 SM PDFYaselaNo ratings yet
- Normal Probability Table: Z 3.50, The Probability Is Greater Than or Equal To 0.9998Document1 pageNormal Probability Table: Z 3.50, The Probability Is Greater Than or Equal To 0.9998Kalyani GogoiNo ratings yet
- AerodynamicsDocument42 pagesAerodynamicsFreda FungNo ratings yet
- Lectures On Electrical MeasurementsDocument87 pagesLectures On Electrical MeasurementsAsdf FdsaNo ratings yet