Download as pdf or txt
You might also like
- A Project Report On "Modelling of Fact Device For Power Flow Analysis"Document45 pagesA Project Report On "Modelling of Fact Device For Power Flow Analysis"gopalchandramahatoNo ratings yet
- ERAU MATH 112 Online SyllabusDocument6 pagesERAU MATH 112 Online Syllabusturbopimp100% (1)
- Optimal Capacitor Placement Voltage Stability and System SecurityDocument7 pagesOptimal Capacitor Placement Voltage Stability and System SecurityTareq AzizNo ratings yet
- Performance Enhancement of Shunt Active Power Filter Application Using Adaptive Neural NetworkDocument8 pagesPerformance Enhancement of Shunt Active Power Filter Application Using Adaptive Neural NetworkkaoutarNo ratings yet
- Impact of Selection of DC Base Values and DC Link ControlDocument14 pagesImpact of Selection of DC Base Values and DC Link ControlalNo ratings yet
- iEACH Paper v8Document9 pagesiEACH Paper v8malekpour_ahmadNo ratings yet
- An Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsDocument6 pagesAn Integrated Active and Reactive Power Control Scheme For Grid-Connected Photovoltaic Production SystemsKirn ZafarNo ratings yet
- Mingbo PDFDocument11 pagesMingbo PDFelhaffarNo ratings yet
- Load Flow Analysis of 132 / 11 KV Distribution Sub Station Using Static Var Compensator For Voltage Enhancement - A Case StudyDocument5 pagesLoad Flow Analysis of 132 / 11 KV Distribution Sub Station Using Static Var Compensator For Voltage Enhancement - A Case Studyvasu1984No ratings yet
- Development of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG ModelsDocument7 pagesDevelopment of Three-Phase Unbalanced Power Flow Using PV and PQ Models For Distributed Generation and Study of The Impact of DG Modelssrinivasa rathnamNo ratings yet
- SCR IjepesDocument11 pagesSCR IjepeskarthikeyanNo ratings yet
- Load Flow Analysis of 132 11 KV Grid Station Bahawalpur Region Pakistan and Its Voltage ImproveDocument6 pagesLoad Flow Analysis of 132 11 KV Grid Station Bahawalpur Region Pakistan and Its Voltage Improveasfar aliNo ratings yet
- Modified Algorithm of Load Flow Simulation For LosDocument8 pagesModified Algorithm of Load Flow Simulation For Los박정모No ratings yet
- Optimal Placement and Sizing of Static VDocument5 pagesOptimal Placement and Sizing of Static VDa VidNo ratings yet
- Research Article: Assessment of Global Voltage Stability Margin Through Radial Basis Function Neural NetworkDocument12 pagesResearch Article: Assessment of Global Voltage Stability Margin Through Radial Basis Function Neural NetworkKassaye GizawNo ratings yet
- Reactive Power Compensation Technologies: State-of-the-Art ReviewDocument21 pagesReactive Power Compensation Technologies: State-of-the-Art ReviewPaola Lorena Ruge GarciaNo ratings yet
- Understanding of Tuning Techniques of Converter Controllers For VSC-HVDCDocument8 pagesUnderstanding of Tuning Techniques of Converter Controllers For VSC-HVDClalitbickNo ratings yet
- A Hybrid Control Scheme ForDocument12 pagesA Hybrid Control Scheme Forgerson gomesNo ratings yet
- Electrical Power and Energy Systems: Thanatchai KulworawanichpongDocument8 pagesElectrical Power and Energy Systems: Thanatchai Kulworawanichpongcastilho22No ratings yet
- Reactive Power Compensation Technologies, State-of-the-Art ReviewDocument21 pagesReactive Power Compensation Technologies, State-of-the-Art ReviewsharptrNo ratings yet
- Capsa Resserech PaperDocument3 pagesCapsa Resserech PaperAbhishek RanjanNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Large-Signal Stability Analysis of DC DistributionDocument10 pagesLarge-Signal Stability Analysis of DC DistributionkennydingliNo ratings yet
- Reactive Power Dispatch Using Particle Swarm Optimization-Time Varying Acceleration CoefficientsDocument3 pagesReactive Power Dispatch Using Particle Swarm Optimization-Time Varying Acceleration CoefficientsDizky Christian HadiNo ratings yet
- Power System State Estimation With and Without Multiple FACTS Devices-SVCDocument5 pagesPower System State Estimation With and Without Multiple FACTS Devices-SVCerpublicationNo ratings yet
- DSP Control of Power Conditioner For Improving Power QualityDocument6 pagesDSP Control of Power Conditioner For Improving Power Qualityapi-3826450No ratings yet
- Active Power Filter ReviewDocument11 pagesActive Power Filter Reviewwenchen_2010No ratings yet
- Model Predictive Control-Based Real-Time Power System Protection SchemesDocument11 pagesModel Predictive Control-Based Real-Time Power System Protection Schemesjinlei chenNo ratings yet
- Three-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsDocument5 pagesThree-Phase Voltage Regulator Modeling For Forward/ Backward Sweep-Based Distribution Systems Power Flow AlgorithmsFerry OpilOpNo ratings yet
- Energies: AC Transmission Emulation Control Strategies For The BTB VSC HVDC System in The Metropolitan Area of SeoulDocument15 pagesEnergies: AC Transmission Emulation Control Strategies For The BTB VSC HVDC System in The Metropolitan Area of Seoulnikon reddyNo ratings yet
- Newton Raphson MethodDocument30 pagesNewton Raphson MethodDinesh Kumar100% (1)
- Reactive Power Compensation Technologies PDFDocument21 pagesReactive Power Compensation Technologies PDFTovar ArmandoNo ratings yet
- Voltage Stability Analysis V-Q Power Flow Simulation Versus Dynamic SimulationDocument6 pagesVoltage Stability Analysis V-Q Power Flow Simulation Versus Dynamic SimulationxuanthamdhqnNo ratings yet
- Multi-Step Predictive Current Control For NPC GridDocument10 pagesMulti-Step Predictive Current Control For NPC GridthinhNo ratings yet
- State Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsDocument7 pagesState Estimation For Electric Power Distribution Systems in Quasi Real-Time ConditionsVarikunta Saikrishna ee22d032No ratings yet
- Hierarchical Hybrid Architecture For Volt Var Control of Power Distribution GridsDocument8 pagesHierarchical Hybrid Architecture For Volt Var Control of Power Distribution Gridsmalekpour_ahmadNo ratings yet
- Sruthirajp2015Document6 pagesSruthirajp2015NikeshManandharNo ratings yet
- Modeling and Simulation of Three Phase D-SVC For Load CompensationDocument11 pagesModeling and Simulation of Three Phase D-SVC For Load CompensationSELEMANI CHEMCHEMNo ratings yet
- Cascade-Free Model Predictive Control For Single-Phase Grid-Connected Power ConvertersDocument9 pagesCascade-Free Model Predictive Control For Single-Phase Grid-Connected Power ConvertersAnonymous FPU4iW89VYNo ratings yet
- Effects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksDocument4 pagesEffects of Tap Changing Transformer and Shunt Capacitor On Voltage Stability Enhancement of Transmission NetworksbogdanNo ratings yet
- Power 53: of TheDocument8 pagesPower 53: of TheTrương Xuân QuýNo ratings yet
- Power System EquivalentsDocument6 pagesPower System Equivalentsdallisrinivas14No ratings yet
- Optimal Placement and Sizing of Static Var Compensators in Power Systems Using Improved Harmony Search AlgorithmDocument5 pagesOptimal Placement and Sizing of Static Var Compensators in Power Systems Using Improved Harmony Search AlgorithmcuamiNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysissalagasimNo ratings yet
- Control of Voltage Stability Using Sensitmty AnalysisDocument10 pagesControl of Voltage Stability Using Sensitmty AnalysisJuan Alex Arequipa ChecaNo ratings yet
- HVDC Control Multitask PDFDocument7 pagesHVDC Control Multitask PDFBHARADWAJ CHIVUKULANo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Document9 pagesMathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Shiv TripathiNo ratings yet
- (IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikDocument6 pages(IJETA-V8I5P8) :simiran Kuwera, Sunil Agarwal, Rajkumar KaushikIJETA - EighthSenseGroup100% (1)
- Performance Analysis of Some FACTS Devices Using Newton Raphson Load Flow AlgorithmDocument6 pagesPerformance Analysis of Some FACTS Devices Using Newton Raphson Load Flow Algorithmadel djariNo ratings yet
- 13 Ijaest Volume No 3 Issue No 2 Transmission Line Stability Improvement Using TCSC 165 173Document9 pages13 Ijaest Volume No 3 Issue No 2 Transmission Line Stability Improvement Using TCSC 165 173iserpNo ratings yet
- Improved Generator Voltage Control in Power Flow SolutionsDocument6 pagesImproved Generator Voltage Control in Power Flow Solutions陆华林No ratings yet
- Voltage Stability Analysis BY Simulated Annealing AlgorithmDocument7 pagesVoltage Stability Analysis BY Simulated Annealing AlgorithmInternational Journal of Engineering and TechniquesNo ratings yet
- Perpendicular System: Utilising HVDC OscillationsDocument8 pagesPerpendicular System: Utilising HVDC OscillationsFelix GamarraNo ratings yet
- Mai H. Nguyen 2010 A Comparative Study of Voltage Stability For Long Distance HVAC and HVDC InterconnectionsDocument8 pagesMai H. Nguyen 2010 A Comparative Study of Voltage Stability For Long Distance HVAC and HVDC InterconnectionsFelix GamarraNo ratings yet
- Improved Sensitivities in MW Dispatch For Control of VoltageDocument7 pagesImproved Sensitivities in MW Dispatch For Control of VoltageVitthal PatnechaNo ratings yet
- A Generalized Power Flow Analysis For Distribution Systems With High Penetration of Distributed GenerationDocument8 pagesA Generalized Power Flow Analysis For Distribution Systems With High Penetration of Distributed GenerationcodeboyjimmyNo ratings yet
- Influence of Large-Scale PV On Voltage Stability of Sub-Transmission SystemDocument14 pagesInfluence of Large-Scale PV On Voltage Stability of Sub-Transmission SystemokasinskiNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- An Intuitive Guide To Numerical Methods HeinoldDocument100 pagesAn Intuitive Guide To Numerical Methods HeinoldSharad Kumar Kaushal100% (1)
- Zero DeterminantsDocument4 pagesZero DeterminantsMiliyon TilahunNo ratings yet
- System Simulation: Dr. DessoukyDocument183 pagesSystem Simulation: Dr. DessoukyParimal BhambareNo ratings yet
- DAA Mid Term Assessment (Spring-2020, Semester) : Muhammad Arif Bahria University Lahore CampusDocument4 pagesDAA Mid Term Assessment (Spring-2020, Semester) : Muhammad Arif Bahria University Lahore CampusHamza Phanoti0% (1)
- Lecture Notes SincDocument5 pagesLecture Notes SincSarbagya BuddhacharyaNo ratings yet
- State Space Description of A Dynamic System: 1. Linear CaseDocument8 pagesState Space Description of A Dynamic System: 1. Linear CaseAnonymous N2c1CpNo ratings yet
- The Brocard - Ramanujan Diophantine Equation N! + 1 M 2Document2 pagesThe Brocard - Ramanujan Diophantine Equation N! + 1 M 2api-26401608No ratings yet
- Dirac Delta FunctionDocument3 pagesDirac Delta FunctionrehanNo ratings yet
- UP CIRCUIT Academic Affairs Division: 1. Lim 2. Lim 3. Lim ( ) 4. Lim LimDocument1 pageUP CIRCUIT Academic Affairs Division: 1. Lim 2. Lim 3. Lim ( ) 4. Lim LimJan Adrian Galang FranciscoNo ratings yet
- 574 - ReviewHandoutDocument4 pages574 - ReviewHandoutarghya_bi108No ratings yet
- Top Ten Summation Formulas: N N N K KDocument2 pagesTop Ten Summation Formulas: N N N K KMike WaniNo ratings yet
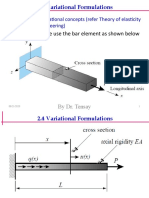
- 2.4 Variational Formulations: - For Illustration, We Use The Bar Element As Shown BelowDocument31 pages2.4 Variational Formulations: - For Illustration, We Use The Bar Element As Shown BelowAwashNo ratings yet
- Formula For SOA MFEDocument4 pagesFormula For SOA MFEferferNo ratings yet
- Algebra of Expressions (46) 3ppDocument3 pagesAlgebra of Expressions (46) 3ppDumitru D. DRAGHIANo ratings yet
- Assignment 1Document3 pagesAssignment 1asif MehmoodNo ratings yet
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 pagesLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNo ratings yet
- Necessary and Sufficient Conditions For Riemann and Riemann-Stieltjes IntegrabilityDocument10 pagesNecessary and Sufficient Conditions For Riemann and Riemann-Stieltjes IntegrabilityAloyana Couto da SilvaNo ratings yet
- A Brief Introduction To Stochastic Calculus: 1 Martingales, Brownian Motion and Quadratic VariationDocument7 pagesA Brief Introduction To Stochastic Calculus: 1 Martingales, Brownian Motion and Quadratic VariationyygorakindyyNo ratings yet
- Mathematics A: Paper 3HR Higher TierDocument20 pagesMathematics A: Paper 3HR Higher TierabhayNo ratings yet
- Differential GeometryDocument9 pagesDifferential GeometrySaba AsgharNo ratings yet
- Homework On Dynamics of StrucutresDocument2 pagesHomework On Dynamics of StrucutresShahidul Islam ShahariarNo ratings yet
- Pier Element Internal ForcesDocument2 pagesPier Element Internal ForceszulbahriNo ratings yet
- ASKARI Co-Learning SpaceDocument5 pagesASKARI Co-Learning SpaceZeeshan MahdiNo ratings yet
- Physica A: J.-C. Walter, G.T. BarkemaDocument10 pagesPhysica A: J.-C. Walter, G.T. BarkemaDANIELGONFANo ratings yet
- Elementary Mechanics of Fluids: Ce 319 F Daene MckinneyDocument14 pagesElementary Mechanics of Fluids: Ce 319 F Daene MckinneyRospita Afriyanti JuntakNo ratings yet
- Mathematics (Algebra) : Engineering Review CenterDocument19 pagesMathematics (Algebra) : Engineering Review CenterNoel dela CernaNo ratings yet
- Chapter 4. Continuous Random Variables: September 27, 2021Document31 pagesChapter 4. Continuous Random Variables: September 27, 2021Ly Duc Hung (K15 HL)No ratings yet
- Konversi Geografis Dan UTM (Formula Redfearn)Document5 pagesKonversi Geografis Dan UTM (Formula Redfearn)Sofyan NemoNo ratings yet
- Velocity Kinematics PDFDocument24 pagesVelocity Kinematics PDFfayyaz khanNo ratings yet