
TG8000 Mainte Checklist
TG8000 Mainte Checklist
You might also like
- TG-8000 ChecklistDocument7 pagesTG-8000 Checklistssecap0% (1)
- TG 8000 GYRO ChecklistDocument3 pagesTG 8000 GYRO ChecklistNishant Pandya0% (1)
- Sif B31.3Document10 pagesSif B31.3Rob Gillespie100% (1)
- Amazon Pestel AnalysisDocument11 pagesAmazon Pestel AnalysisK. Neeraj100% (1)
- TG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Document12 pagesTG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Al NakheelElectronicsNo ratings yet
- Wisco Adventure - Ani GyroDocument2 pagesWisco Adventure - Ani Gyroshaikh junaidNo ratings yet
- TG-8000 Check Sheet (MAINTENANCE)Document3 pagesTG-8000 Check Sheet (MAINTENANCE)REY JESUS HERNANDEZ JIMENEZ100% (1)
- Objective Type Questions: (1 Mark Each)Document5 pagesObjective Type Questions: (1 Mark Each)SIRSHA PATTANAYAKNo ratings yet
- Y +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Document4 pagesY +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Pavan Poreyana BalakrishnaNo ratings yet
- PanelDataNotes 7Document77 pagesPanelDataNotes 7Anonymous ed8Y8fCxkSNo ratings yet
- Report DLD SaDocument18 pagesReport DLD SaHarsh ModiNo ratings yet
- Oscilloscope: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramDocument6 pagesOscilloscope: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramAbdulNo ratings yet
- Ti 89 Titanium Exercise 3Document10 pagesTi 89 Titanium Exercise 3kalimbaloNo ratings yet
- Two-Stage Operational Amplifier Layout Design: in Fulfillment of The Requirements For Ece 135 Cad Tool DesignDocument13 pagesTwo-Stage Operational Amplifier Layout Design: in Fulfillment of The Requirements For Ece 135 Cad Tool DesignMark AbadiesNo ratings yet
- Mat136 IntegrationDocument21 pagesMat136 IntegrationEssa BalochNo ratings yet
- IDF CurveDocument12 pagesIDF CurveArunima Gupta100% (1)
- Shear Building - SeismicDocument13 pagesShear Building - SeismicArut MV100% (1)
- Homework 2Document7 pagesHomework 2yingwuenchanNo ratings yet
- Automizing The Design of Francis Turbine Spiral CaseDocument10 pagesAutomizing The Design of Francis Turbine Spiral CaseGökhan ÇiçekNo ratings yet
- RCourse-Lecture11-Calculations-Built in Functions and Assignments - WatermarkDocument14 pagesRCourse-Lecture11-Calculations-Built in Functions and Assignments - WatermarkkavithanjaliNo ratings yet
- Toshiba RAVDocument44 pagesToshiba RAVДелян ГеоргиевNo ratings yet
- 2017 CompC SVC Rev E PDFDocument2 pages2017 CompC SVC Rev E PDFmiguelNo ratings yet
- Structural Analysis and Design Report ofDocument92 pagesStructural Analysis and Design Report ofchinyhNo ratings yet
- Weight CalculationDocument13 pagesWeight CalculationPankaj BijweNo ratings yet
- Wind Girder Calculations: Appendix 'M' Is Applicable?Document8 pagesWind Girder Calculations: Appendix 'M' Is Applicable?Anonymous LKi1w1uNo ratings yet
- Adobe Scan 9 Sep 2022Document6 pagesAdobe Scan 9 Sep 2022SHYAMNo ratings yet
- C Purlin As Wall Stud DesignDocument7 pagesC Purlin As Wall Stud DesignLane TanNo ratings yet
- Maxima Class Notes: 2.1 Save Time 2.2 Simple UI 2.3 Less RestrictionsDocument10 pagesMaxima Class Notes: 2.1 Save Time 2.2 Simple UI 2.3 Less RestrictionsAkshitNo ratings yet
- HLC - TLC - FO - 07 - G061-N18-BC2A Amend-S-Cold-formed C-Section Check - Frame 2178Document6 pagesHLC - TLC - FO - 07 - G061-N18-BC2A Amend-S-Cold-formed C-Section Check - Frame 2178Phú NguyễnNo ratings yet
- Price Schedule (Vol-3)Document3 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- Homework: 4: AnswerDocument9 pagesHomework: 4: AnswerRobel TeweldeNo ratings yet
- Adaptive SharpenDocument4 pagesAdaptive SharpenTanNo ratings yet
- Practice Problems and Solutions 3process Design and Facility LayoutDocument10 pagesPractice Problems and Solutions 3process Design and Facility Layoutbusiness docNo ratings yet
- Altera: Contact Us Now To Book Your DemonstrationDocument2 pagesAltera: Contact Us Now To Book Your DemonstrationJorge OliveiraNo ratings yet
- G CodeDocument9 pagesG CodeArga Rio MugafiNo ratings yet
- Width: R6 - Top ChordDocument6 pagesWidth: R6 - Top ChordJames382No ratings yet
- R6 PDFDocument6 pagesR6 PDFJames382No ratings yet
- Section PropertiesDocument6 pagesSection PropertiesJames382No ratings yet
- Width: R6 - Top ChordDocument6 pagesWidth: R6 - Top ChordJames382No ratings yet
- Experiment No.1: 1) Objective: 2) ApparatusDocument19 pagesExperiment No.1: 1) Objective: 2) ApparatusMuhammad Ali Jan-2 293No ratings yet
- Group ADocument2 pagesGroup ASomnath PalNo ratings yet
- Additional Exam FaurizaDocument7 pagesAdditional Exam FaurizafaurizaNo ratings yet
- A MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsDocument20 pagesA MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsAnonymous REw1YIq4q7No ratings yet
- Meesho IitbhuDocument10 pagesMeesho IitbhuAjeet kumarNo ratings yet
- Mikeio-Dfs2 - Global Forecasting System - Ipynb at Main DHI-mikeio GitHubDocument15 pagesMikeio-Dfs2 - Global Forecasting System - Ipynb at Main DHI-mikeio GitHubRiza IskandarNo ratings yet
- ISO 6346 - How To Find The Cheque Digit NumberDocument11 pagesISO 6346 - How To Find The Cheque Digit Numbersanbin007No ratings yet
- Duplex 3.22 EN DE 2014 06 WebDocument65 pagesDuplex 3.22 EN DE 2014 06 WebjuandelaparraNo ratings yet
- Calc N & K of Glass Slide: Key Functions & SetupDocument4 pagesCalc N & K of Glass Slide: Key Functions & SetupjackmciNo ratings yet
- 3.5.1. ConnectionDocument4 pages3.5.1. ConnectionMuhammad Sigit WahyudiNo ratings yet
- A5-1 Algorithim in CDocument4 pagesA5-1 Algorithim in CMatthew AndersonNo ratings yet
- Robust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlDocument26 pagesRobust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlYolandaNo ratings yet
- Summed Area TablesDocument29 pagesSummed Area TablesDhillonvNo ratings yet
- Калькулятор. ИнструкцияDocument182 pagesКалькулятор. ИнструкцияIvanNo ratings yet
- Foundation Design As Per ACI & BowlesDocument17 pagesFoundation Design As Per ACI & BowlessivakumarNo ratings yet
- Solution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Document6 pagesSolution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Lamberto Bancoro Marcial Jr.No ratings yet
- 9608/43/M/J/15 © Ucles 2015Document22 pages9608/43/M/J/15 © Ucles 2015Oluwatobi FajemiyoNo ratings yet
- Kvaerner E & C Uk LTDDocument3 pagesKvaerner E & C Uk LTDVaniya GoelNo ratings yet
- Product SpecificationDocument4 pagesProduct Specificationivo rodriguesNo ratings yet
- 6.003 Homework #13 Solutions: ProblemsDocument9 pages6.003 Homework #13 Solutions: Problemsvaishnavi khilariNo ratings yet
- CBME 102 REviewerDocument17 pagesCBME 102 REviewerEilen Joyce BisnarNo ratings yet
- Feature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDocument2 pagesFeature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDaniel Eduardo RodriguezNo ratings yet
- Reflection #1Document4 pagesReflection #1Jaypee Morgan100% (3)
- शिक्षामनोविज्ञानDocument2 pagesशिक्षामनोविज्ञानlalit sharmaNo ratings yet
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- Ashcroft Dial GaugeDocument1 pageAshcroft Dial GaugeReva Astra DiptaNo ratings yet
- Philosophy of Educationsample Isms With Answersclue KeywordpdfDocument16 pagesPhilosophy of Educationsample Isms With Answersclue KeywordpdfScribdNo ratings yet
- Mina Meid Bypass Panel For Reseller - GSM-ForumDocument2 pagesMina Meid Bypass Panel For Reseller - GSM-ForumYohan RodriguezNo ratings yet
- American Scientific Research Journal For Engineering, Technology, and Sciences (Asrjets), Vol 6, No 1 (2013), Issn (Print) 2313-44106Document2 pagesAmerican Scientific Research Journal For Engineering, Technology, and Sciences (Asrjets), Vol 6, No 1 (2013), Issn (Print) 2313-44106atilaelciNo ratings yet
- DK Selling StrategiesDocument7 pagesDK Selling StrategiesMilan DzigurskiNo ratings yet
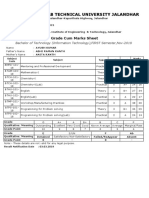
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- Thesis Statement About Business AdministrationDocument4 pagesThesis Statement About Business Administrationokxyghxff100% (2)
- UNIT 1 - Sequence 1.mdiDocument7 pagesUNIT 1 - Sequence 1.mdi,arcisNo ratings yet
- Suppliers Assessment ChecklistDocument3 pagesSuppliers Assessment ChecklistRonnel LeanoNo ratings yet
- A Astronom As EsDocument40 pagesA Astronom As EsareianoarNo ratings yet
- A. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGDocument143 pagesA. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGRyan Togonon100% (1)
- Gilbert Erector Set GuidebookDocument72 pagesGilbert Erector Set Guidebookdomingojs233710No ratings yet
- I Series FuserDocument2 pagesI Series FuserxerotecNo ratings yet
- Le Wagon FullstackDocument23 pagesLe Wagon FullstackClara VaninaNo ratings yet
- Specifications PDFDocument30 pagesSpecifications PDFRivaiNo ratings yet
- B787 MmelDocument215 pagesB787 Mmeljoker hotNo ratings yet
- The Changing Politics of Foreign PolicyDocument3 pagesThe Changing Politics of Foreign PolicyLuís PatriotaNo ratings yet
- Environmental Conservation in Bhutan: Organization and PolicyDocument21 pagesEnvironmental Conservation in Bhutan: Organization and PolicyApriele Rose Gaudicos HermogenesNo ratings yet
- Purchasing & Supply Management: Issues To Be AddressedDocument11 pagesPurchasing & Supply Management: Issues To Be AddressedprashantsrathorNo ratings yet
- Hindustan Lever: Case 15-4Document11 pagesHindustan Lever: Case 15-4anilnair88100% (1)
- Fuel EnergizerDocument29 pagesFuel EnergizeratulsemiloNo ratings yet
























































































Download as xlsx, pdf, or txt
You might also like
- TG-8000 ChecklistDocument7 pagesTG-8000 Checklistssecap0% (1)
- TG 8000 GYRO ChecklistDocument3 pagesTG 8000 GYRO ChecklistNishant Pandya0% (1)
- Sif B31.3Document10 pagesSif B31.3Rob Gillespie100% (1)
- Amazon Pestel AnalysisDocument11 pagesAmazon Pestel AnalysisK. Neeraj100% (1)
- TG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Document12 pagesTG 8000 - Mainte CHK (E) (CSA CK2056C - Rev20180622)Al NakheelElectronicsNo ratings yet
- Wisco Adventure - Ani GyroDocument2 pagesWisco Adventure - Ani Gyroshaikh junaidNo ratings yet
- TG-8000 Check Sheet (MAINTENANCE)Document3 pagesTG-8000 Check Sheet (MAINTENANCE)REY JESUS HERNANDEZ JIMENEZ100% (1)
- Objective Type Questions: (1 Mark Each)Document5 pagesObjective Type Questions: (1 Mark Each)SIRSHA PATTANAYAKNo ratings yet
- Y +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Document4 pagesY +ve My 0.8: Cold Formed Thin Gauge Section Design (Bs5950-5:1998)Pavan Poreyana BalakrishnaNo ratings yet
- PanelDataNotes 7Document77 pagesPanelDataNotes 7Anonymous ed8Y8fCxkSNo ratings yet
- Report DLD SaDocument18 pagesReport DLD SaHarsh ModiNo ratings yet
- Oscilloscope: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramDocument6 pagesOscilloscope: College of Arts and Sciences Mathematics, Statistics and Physics Department Physics ProgramAbdulNo ratings yet
- Ti 89 Titanium Exercise 3Document10 pagesTi 89 Titanium Exercise 3kalimbaloNo ratings yet
- Two-Stage Operational Amplifier Layout Design: in Fulfillment of The Requirements For Ece 135 Cad Tool DesignDocument13 pagesTwo-Stage Operational Amplifier Layout Design: in Fulfillment of The Requirements For Ece 135 Cad Tool DesignMark AbadiesNo ratings yet
- Mat136 IntegrationDocument21 pagesMat136 IntegrationEssa BalochNo ratings yet
- IDF CurveDocument12 pagesIDF CurveArunima Gupta100% (1)
- Shear Building - SeismicDocument13 pagesShear Building - SeismicArut MV100% (1)
- Homework 2Document7 pagesHomework 2yingwuenchanNo ratings yet
- Automizing The Design of Francis Turbine Spiral CaseDocument10 pagesAutomizing The Design of Francis Turbine Spiral CaseGökhan ÇiçekNo ratings yet
- RCourse-Lecture11-Calculations-Built in Functions and Assignments - WatermarkDocument14 pagesRCourse-Lecture11-Calculations-Built in Functions and Assignments - WatermarkkavithanjaliNo ratings yet
- Toshiba RAVDocument44 pagesToshiba RAVДелян ГеоргиевNo ratings yet
- 2017 CompC SVC Rev E PDFDocument2 pages2017 CompC SVC Rev E PDFmiguelNo ratings yet
- Structural Analysis and Design Report ofDocument92 pagesStructural Analysis and Design Report ofchinyhNo ratings yet
- Weight CalculationDocument13 pagesWeight CalculationPankaj BijweNo ratings yet
- Wind Girder Calculations: Appendix 'M' Is Applicable?Document8 pagesWind Girder Calculations: Appendix 'M' Is Applicable?Anonymous LKi1w1uNo ratings yet
- Adobe Scan 9 Sep 2022Document6 pagesAdobe Scan 9 Sep 2022SHYAMNo ratings yet
- C Purlin As Wall Stud DesignDocument7 pagesC Purlin As Wall Stud DesignLane TanNo ratings yet
- Maxima Class Notes: 2.1 Save Time 2.2 Simple UI 2.3 Less RestrictionsDocument10 pagesMaxima Class Notes: 2.1 Save Time 2.2 Simple UI 2.3 Less RestrictionsAkshitNo ratings yet
- HLC - TLC - FO - 07 - G061-N18-BC2A Amend-S-Cold-formed C-Section Check - Frame 2178Document6 pagesHLC - TLC - FO - 07 - G061-N18-BC2A Amend-S-Cold-formed C-Section Check - Frame 2178Phú NguyễnNo ratings yet
- Price Schedule (Vol-3)Document3 pagesPrice Schedule (Vol-3)Anonymous R0s0Nd6yNo ratings yet
- Homework: 4: AnswerDocument9 pagesHomework: 4: AnswerRobel TeweldeNo ratings yet
- Adaptive SharpenDocument4 pagesAdaptive SharpenTanNo ratings yet
- Practice Problems and Solutions 3process Design and Facility LayoutDocument10 pagesPractice Problems and Solutions 3process Design and Facility Layoutbusiness docNo ratings yet
- Altera: Contact Us Now To Book Your DemonstrationDocument2 pagesAltera: Contact Us Now To Book Your DemonstrationJorge OliveiraNo ratings yet
- G CodeDocument9 pagesG CodeArga Rio MugafiNo ratings yet
- Width: R6 - Top ChordDocument6 pagesWidth: R6 - Top ChordJames382No ratings yet
- R6 PDFDocument6 pagesR6 PDFJames382No ratings yet
- Section PropertiesDocument6 pagesSection PropertiesJames382No ratings yet
- Width: R6 - Top ChordDocument6 pagesWidth: R6 - Top ChordJames382No ratings yet
- Experiment No.1: 1) Objective: 2) ApparatusDocument19 pagesExperiment No.1: 1) Objective: 2) ApparatusMuhammad Ali Jan-2 293No ratings yet
- Group ADocument2 pagesGroup ASomnath PalNo ratings yet
- Additional Exam FaurizaDocument7 pagesAdditional Exam FaurizafaurizaNo ratings yet
- A MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsDocument20 pagesA MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsAnonymous REw1YIq4q7No ratings yet
- Meesho IitbhuDocument10 pagesMeesho IitbhuAjeet kumarNo ratings yet
- Mikeio-Dfs2 - Global Forecasting System - Ipynb at Main DHI-mikeio GitHubDocument15 pagesMikeio-Dfs2 - Global Forecasting System - Ipynb at Main DHI-mikeio GitHubRiza IskandarNo ratings yet
- ISO 6346 - How To Find The Cheque Digit NumberDocument11 pagesISO 6346 - How To Find The Cheque Digit Numbersanbin007No ratings yet
- Duplex 3.22 EN DE 2014 06 WebDocument65 pagesDuplex 3.22 EN DE 2014 06 WebjuandelaparraNo ratings yet
- Calc N & K of Glass Slide: Key Functions & SetupDocument4 pagesCalc N & K of Glass Slide: Key Functions & SetupjackmciNo ratings yet
- 3.5.1. ConnectionDocument4 pages3.5.1. ConnectionMuhammad Sigit WahyudiNo ratings yet
- A5-1 Algorithim in CDocument4 pagesA5-1 Algorithim in CMatthew AndersonNo ratings yet
- Robust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlDocument26 pagesRobust Control For Variable-Speed Two-Bladed Horizontal-Axis Wind Turbines Via Chattering ControlYolandaNo ratings yet
- Summed Area TablesDocument29 pagesSummed Area TablesDhillonvNo ratings yet
- Калькулятор. ИнструкцияDocument182 pagesКалькулятор. ИнструкцияIvanNo ratings yet
- Foundation Design As Per ACI & BowlesDocument17 pagesFoundation Design As Per ACI & BowlessivakumarNo ratings yet
- Solution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Document6 pagesSolution: Vertical Section Depth (FT.) Avg. Vel. (FPS)Lamberto Bancoro Marcial Jr.No ratings yet
- 9608/43/M/J/15 © Ucles 2015Document22 pages9608/43/M/J/15 © Ucles 2015Oluwatobi FajemiyoNo ratings yet
- Kvaerner E & C Uk LTDDocument3 pagesKvaerner E & C Uk LTDVaniya GoelNo ratings yet
- Product SpecificationDocument4 pagesProduct Specificationivo rodriguesNo ratings yet
- 6.003 Homework #13 Solutions: ProblemsDocument9 pages6.003 Homework #13 Solutions: Problemsvaishnavi khilariNo ratings yet
- CBME 102 REviewerDocument17 pagesCBME 102 REviewerEilen Joyce BisnarNo ratings yet
- Feature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDocument2 pagesFeature: SFP Optical Module 1 .25G Double Optical Fiber 20kmDaniel Eduardo RodriguezNo ratings yet
- Reflection #1Document4 pagesReflection #1Jaypee Morgan100% (3)
- शिक्षामनोविज्ञानDocument2 pagesशिक्षामनोविज्ञानlalit sharmaNo ratings yet
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- Cambridge IGCSE: Information and Communication Technology 0417/31Document8 pagesCambridge IGCSE: Information and Communication Technology 0417/31Erdoğan ŞahinNo ratings yet
- Ashcroft Dial GaugeDocument1 pageAshcroft Dial GaugeReva Astra DiptaNo ratings yet
- Philosophy of Educationsample Isms With Answersclue KeywordpdfDocument16 pagesPhilosophy of Educationsample Isms With Answersclue KeywordpdfScribdNo ratings yet
- Mina Meid Bypass Panel For Reseller - GSM-ForumDocument2 pagesMina Meid Bypass Panel For Reseller - GSM-ForumYohan RodriguezNo ratings yet
- American Scientific Research Journal For Engineering, Technology, and Sciences (Asrjets), Vol 6, No 1 (2013), Issn (Print) 2313-44106Document2 pagesAmerican Scientific Research Journal For Engineering, Technology, and Sciences (Asrjets), Vol 6, No 1 (2013), Issn (Print) 2313-44106atilaelciNo ratings yet
- DK Selling StrategiesDocument7 pagesDK Selling StrategiesMilan DzigurskiNo ratings yet
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- Thesis Statement About Business AdministrationDocument4 pagesThesis Statement About Business Administrationokxyghxff100% (2)
- UNIT 1 - Sequence 1.mdiDocument7 pagesUNIT 1 - Sequence 1.mdi,arcisNo ratings yet
- Suppliers Assessment ChecklistDocument3 pagesSuppliers Assessment ChecklistRonnel LeanoNo ratings yet
- A Astronom As EsDocument40 pagesA Astronom As EsareianoarNo ratings yet
- A. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGDocument143 pagesA. B. 0.99 M /KG 0.79 M /KG 0.89 M /KG 0.69m /KGRyan Togonon100% (1)
- Gilbert Erector Set GuidebookDocument72 pagesGilbert Erector Set Guidebookdomingojs233710No ratings yet
- I Series FuserDocument2 pagesI Series FuserxerotecNo ratings yet
- Le Wagon FullstackDocument23 pagesLe Wagon FullstackClara VaninaNo ratings yet
- Specifications PDFDocument30 pagesSpecifications PDFRivaiNo ratings yet
- B787 MmelDocument215 pagesB787 Mmeljoker hotNo ratings yet
- The Changing Politics of Foreign PolicyDocument3 pagesThe Changing Politics of Foreign PolicyLuís PatriotaNo ratings yet
- Environmental Conservation in Bhutan: Organization and PolicyDocument21 pagesEnvironmental Conservation in Bhutan: Organization and PolicyApriele Rose Gaudicos HermogenesNo ratings yet
- Purchasing & Supply Management: Issues To Be AddressedDocument11 pagesPurchasing & Supply Management: Issues To Be AddressedprashantsrathorNo ratings yet
- Hindustan Lever: Case 15-4Document11 pagesHindustan Lever: Case 15-4anilnair88100% (1)
- Fuel EnergizerDocument29 pagesFuel EnergizeratulsemiloNo ratings yet