Download as pdf or txt
You might also like
- Lecture 4. Classification of ExcursionsDocument8 pagesLecture 4. Classification of ExcursionsMarcela MonroyNo ratings yet
- Highway Geometric DesignDocument40 pagesHighway Geometric Designharikeerthan84% (19)
- Sample PM ChecklistDocument4 pagesSample PM ChecklistmohsinsafiNo ratings yet
- Vertical Alignment: State Highway Geometric Design Manual Section 5: Vertical Alignment 5 - 1Document16 pagesVertical Alignment: State Highway Geometric Design Manual Section 5: Vertical Alignment 5 - 1Chandrasiri de SilvaNo ratings yet
- Highway Engineering: New Era UniversityDocument17 pagesHighway Engineering: New Era UniversityGuile LizNo ratings yet
- Roadway Geometric Design II - Cross-Sections and Road TypesDocument53 pagesRoadway Geometric Design II - Cross-Sections and Road Typesumedkhan09131No ratings yet
- Mining Haul Roads by Abhishek MishraDocument19 pagesMining Haul Roads by Abhishek MishraAbhishek Mishra100% (1)
- Roadside Features: State Highway Geometric Design Manual Section 7: Roadside Features 7 - 1Document36 pagesRoadside Features: State Highway Geometric Design Manual Section 7: Roadside Features 7 - 1Abdul Rahman HilmiNo ratings yet
- Chapter 3: Geometric Design of Highways: D Ep Artm Ent of Civil Engineering, Ambo UniversityDocument27 pagesChapter 3: Geometric Design of Highways: D Ep Artm Ent of Civil Engineering, Ambo UniversityTarmok Hirpo100% (1)
- ERA Geometric Design Manual With Appendices Final - Chapter 6-12Document89 pagesERA Geometric Design Manual With Appendices Final - Chapter 6-12Yohannes Girma0% (1)
- Super Elevation Iowa Department of Transportation Office of DesignDocument9 pagesSuper Elevation Iowa Department of Transportation Office of DesignDody Widodo100% (1)
- Group 3 DESIGN CRITERIA FOR HIGHWAYS AND RAILWAYSDocument24 pagesGroup 3 DESIGN CRITERIA FOR HIGHWAYS AND RAILWAYScarieNo ratings yet
- Lecturenote - 802493092HW I-Chap-4 - HandoutDocument34 pagesLecturenote - 802493092HW I-Chap-4 - HandoutHaile GuebreMariamNo ratings yet
- Highway Assignments AknDocument6 pagesHighway Assignments AknJOHN KENNETH JIMENONo ratings yet
- 2.2 Design Criteria of HighwaysDocument26 pages2.2 Design Criteria of HighwaysMikealla David100% (1)
- RDMSec5 20150117 PDFDocument45 pagesRDMSec5 20150117 PDFtejaswiniNo ratings yet
- Lecture 2 Cce 2424 Pavement Design and ConstructionDocument17 pagesLecture 2 Cce 2424 Pavement Design and Constructionmotanyadebra11No ratings yet
- Geometric Design Manual 2002, Chapter 6, Cross Section ElementsDocument7 pagesGeometric Design Manual 2002, Chapter 6, Cross Section ElementsHijikata ShiroiNo ratings yet
- V 35119123Document5 pagesV 35119123akash nairNo ratings yet
- What Is Geometric Design of Highway?Document6 pagesWhat Is Geometric Design of Highway?JOHN KENNETH JIMENO100% (1)
- Highway Engineering Chapter TwoDocument17 pagesHighway Engineering Chapter TwoCHANDRAKANT BHUKTARENo ratings yet
- CH-2 Geometric Design HODocument23 pagesCH-2 Geometric Design HOBebi WakaNo ratings yet
- Quiz 3Document5 pagesQuiz 3Jeneveive Mae BalbinNo ratings yet
- Methodology MINI PROJECT TRANSPORTDocument10 pagesMethodology MINI PROJECT TRANSPORTAdib HilmanNo ratings yet
- Side Friction Demand Versus Side Friction Assumed For Curve Design On Two-Lane Rural HighwaysDocument11 pagesSide Friction Demand Versus Side Friction Assumed For Curve Design On Two-Lane Rural HighwaysemraanNo ratings yet
- Haul RoadDocument26 pagesHaul RoadRohit Kumar100% (1)
- Project PDFDocument14 pagesProject PDFYeshiwondim100% (1)
- Roadway Cross-Sections - USDocument54 pagesRoadway Cross-Sections - USSayal SattarNo ratings yet
- Highway AlignmentDocument14 pagesHighway AlignmentSai Ashrith Moturi100% (1)
- Unit 4Document9 pagesUnit 4manoj mlpNo ratings yet
- Cross SectionDocument47 pagesCross SectionDevi PrasadNo ratings yet
- HDM - 04 Cross SectionsDocument50 pagesHDM - 04 Cross Sectionsna naserNo ratings yet
- CE414 02 Design FactorsDocument7 pagesCE414 02 Design FactorsMohamed Imbarek EsekbiNo ratings yet
- Lect No. 13Document27 pagesLect No. 13kamran KhanNo ratings yet
- Design of Flexible Pavemant PDFDocument15 pagesDesign of Flexible Pavemant PDFSayantan ChakrabortyNo ratings yet
- Design and Construction of Mining RoadsDocument51 pagesDesign and Construction of Mining RoadsScribdTranslationsNo ratings yet
- Economics of Haul Road ConstructionDocument8 pagesEconomics of Haul Road Constructionhendri sulistiawan100% (1)
- CH-3 Geometric Design of HighwaysDocument146 pagesCH-3 Geometric Design of HighwaysRmesh jhaNo ratings yet
- TransportationDocument7 pagesTransportationawasarevinayakNo ratings yet
- HIGHWAY ENGINEERING - Branch of CivilDocument12 pagesHIGHWAY ENGINEERING - Branch of CivilJessie ReyesNo ratings yet
- Geometric Design - Vertical AlignmentDocument8 pagesGeometric Design - Vertical Alignmentsydney augustNo ratings yet
- Module 2 1Document142 pagesModule 2 1Pankaj N ReddyNo ratings yet
- Road DesignDocument75 pagesRoad Designjansen100% (1)
- FlowMaster 06 Pavement DrainageDocument39 pagesFlowMaster 06 Pavement Drainagejoseluis789No ratings yet
- Geometric Design of HighwaysDocument27 pagesGeometric Design of HighwaysabdiljemilmuhadinNo ratings yet
- Chapter 3 Geometric DesignDocument44 pagesChapter 3 Geometric DesignMul'ataa Vission AbdiisaaNo ratings yet
- Design of Overlay Flexible PavementDocument17 pagesDesign of Overlay Flexible PavementJoseph MathewNo ratings yet
- 3 Highway MedianDocument64 pages3 Highway MedianLovely Mae Cruza GawinganNo ratings yet
- Intersection DesignDocument60 pagesIntersection Designsareenpriya100% (4)
- KPC Roads Manual - Full VersionDocument104 pagesKPC Roads Manual - Full VersionayubpasombaNo ratings yet
- Cross Slopes and Pavement PeakDocument13 pagesCross Slopes and Pavement PeakNurul Atiqa100% (1)
- Design of Highway Alignment: P. Nimitha, Malik Fahad, Mohammmad Abdul Dastagir Ahmed C. Sindhu, G. MounikaDocument11 pagesDesign of Highway Alignment: P. Nimitha, Malik Fahad, Mohammmad Abdul Dastagir Ahmed C. Sindhu, G. MounikaYyhhNo ratings yet
- Highway-Geometric-Design SolutionDocument54 pagesHighway-Geometric-Design SolutionNajeebullah MandokhailNo ratings yet
- Module - 2Document64 pagesModule - 2Ricky MeyerNo ratings yet
- HIGHWAY ENGINEERING (2marks) PDFDocument10 pagesHIGHWAY ENGINEERING (2marks) PDFGanesh Padmanaban100% (2)
- Design ControlsDocument28 pagesDesign ControlsHarold Taylor100% (1)
- Designing The HighwayDocument44 pagesDesigning The HighwayAl-Fahme Sajiran100% (1)
- Soil Investigation and Foundation DesignFrom EverandSoil Investigation and Foundation DesignRating: 4.5 out of 5 stars4.5/5 (9)
- Guide for Planning, Construction and Maintenance of Forest RoadsFrom EverandGuide for Planning, Construction and Maintenance of Forest RoadsNo ratings yet
- Soil Bioengineering for Infrastructure Development in Cambodia: A Study on Vetiver Grass and Liquid Soil Catalysts for Road ProjectsFrom EverandSoil Bioengineering for Infrastructure Development in Cambodia: A Study on Vetiver Grass and Liquid Soil Catalysts for Road ProjectsNo ratings yet
- Guide to Performance-Based Road Maintenance ContractsFrom EverandGuide to Performance-Based Road Maintenance ContractsNo ratings yet
- Perubahan Harga September 2018Document70 pagesPerubahan Harga September 2018Frank ConnerNo ratings yet
- Document 3Document3 pagesDocument 3Mae BalmaterNo ratings yet
- Aisin Atf&Amp CVTF Catalogue 2016Document70 pagesAisin Atf&Amp CVTF Catalogue 2016nataoreiro1985No ratings yet
- A Study On Operation and Claim Procedure of Motor Vehicle InsuranceDocument94 pagesA Study On Operation and Claim Procedure of Motor Vehicle InsuranceRushikesh SonawaneNo ratings yet
- Multicultural Diversity in Workplace For Tourism and Hospitality ProfessionalsDocument13 pagesMulticultural Diversity in Workplace For Tourism and Hospitality ProfessionalsTrisha R. MedallonNo ratings yet
- Notification AIATSL Various Vacncy PostsDocument21 pagesNotification AIATSL Various Vacncy PostsRAZNo ratings yet
- SB 694Document3 pagesSB 694Yarisa VangeNo ratings yet
- Hire Purchase Auto Finance CentresDocument6 pagesHire Purchase Auto Finance CentresHariz ShaharizuanNo ratings yet
- 4.5 Rating Power Systems For Earthquake Safety: 4.5.1 General PrinciplesDocument14 pages4.5 Rating Power Systems For Earthquake Safety: 4.5.1 General PrinciplesNur FajarNo ratings yet
- Irctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Document1 pageIrctcs E-Ticketing Service Electronic Reservation Slip (Personal User)Amarjeet KrishhnanNo ratings yet
- TES-P-122-07-R1-Transmission Structure SpottingDocument18 pagesTES-P-122-07-R1-Transmission Structure SpottingMozammil AkhtarNo ratings yet
- 120 GB/S 1/10 Gigabit Ethernet Stratadnx® Qumran-Ux Ethernet Switch SeriesDocument1 page120 GB/S 1/10 Gigabit Ethernet Stratadnx® Qumran-Ux Ethernet Switch SeriesMarcos TokunagaNo ratings yet
- Liebherr T274Document28 pagesLiebherr T274NatasyaNo ratings yet
- Home Automatic Washers: Refer To Page 3 For Model NumbersDocument26 pagesHome Automatic Washers: Refer To Page 3 For Model NumbersCruz Alberto MartinezNo ratings yet
- Department of Transportation Federal Aviation AdministrationDocument20 pagesDepartment of Transportation Federal Aviation AdministrationIgor MedeirosNo ratings yet
- Oil Grades and CapacitiesDocument1 pageOil Grades and CapacitiesFelix VioletaNo ratings yet
- JP Double Dcker Executive Class (EC) : Electronic Reserva On Slip (ERS)Document2 pagesJP Double Dcker Executive Class (EC) : Electronic Reserva On Slip (ERS)asdfjkNo ratings yet
- CodesDocument12 pagesCodesCham ArevaloNo ratings yet
- Tractor Maintenance Manual: Submitted By: Wilfredo B. AlgonesDocument21 pagesTractor Maintenance Manual: Submitted By: Wilfredo B. AlgonesWil AlgonesNo ratings yet
- Cambridge O Level: STATISTICS 4040/22Document16 pagesCambridge O Level: STATISTICS 4040/22Bhavya ReddyNo ratings yet
- (Gửi SV) 2024. AV2 (LIFE A2-B1) - Ôn tập (không đáp án)Document70 pages(Gửi SV) 2024. AV2 (LIFE A2-B1) - Ôn tập (không đáp án)Hoài ThươngNo ratings yet
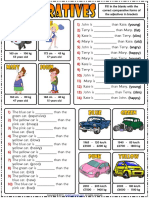
- Comparative Forms of Adjectives Esl Grammar Gap Fill Exercises WorksheetDocument2 pagesComparative Forms of Adjectives Esl Grammar Gap Fill Exercises WorksheetMons. Juan Carlos OrtizNo ratings yet
- MR MUHAMAD AMSANI TiketDocument2 pagesMR MUHAMAD AMSANI TiketMuhamad AmsaniNo ratings yet
- Mass & Balance: Bem Measurements Frequency of MeasurementDocument3 pagesMass & Balance: Bem Measurements Frequency of MeasurementMoslem Grimaldi100% (2)
- DepartDocument3 pagesDepartadum turnipNo ratings yet
- Technical Seminar Report (Zohaib)Document31 pagesTechnical Seminar Report (Zohaib)Zohaib Umair100% (3)
- AFS Convention - Ban On Cybutryne in Hull Coatings-2023Document4 pagesAFS Convention - Ban On Cybutryne in Hull Coatings-2023S DNo ratings yet
- 08n Safety Action PlanDocument103 pages08n Safety Action PlanMohammed MinhajNo ratings yet