Download as pdf or txt
You might also like
- 2 KinematicsDocument9 pages2 KinematicsBrigitte ReyesNo ratings yet
- Visual Image Interpretation-TextDocument18 pagesVisual Image Interpretation-TextSaurabh Suman100% (5)
- PHYS 419: Classical Mechanics Lecture Notes: I. Work and EnergyDocument8 pagesPHYS 419: Classical Mechanics Lecture Notes: I. Work and EnergySanu Kaji MaharjanNo ratings yet
- Circular Motion: T 2π r T holdsDocument13 pagesCircular Motion: T 2π r T holdsUti MichaelNo ratings yet
- Classical Mechanics IIT Jam Practice PaperDocument4 pagesClassical Mechanics IIT Jam Practice PapershivanandNo ratings yet
- Energy Requirements of Sprinting: Part IDocument7 pagesEnergy Requirements of Sprinting: Part IShaun BrentnallNo ratings yet
- Notes On The Control of An Aircraft With Throttle OnlyDocument5 pagesNotes On The Control of An Aircraft With Throttle OnlyMd CassimNo ratings yet
- General Relativity 4Document13 pagesGeneral Relativity 4HarshitNo ratings yet
- DE in Rocket PropulsionDocument7 pagesDE in Rocket Propulsionb23cs1037No ratings yet
- Aircraft Pitch Roll DynamicsDocument8 pagesAircraft Pitch Roll Dynamicsxirij47633No ratings yet
- Golf Ball Paper Final DraftDocument18 pagesGolf Ball Paper Final DraftSiva RajNo ratings yet
- Example 1Document22 pagesExample 1Rohan sharmaNo ratings yet
- LandingDocument3 pagesLandingAna AnaNo ratings yet
- Equations of Aircraft Motion PDFDocument7 pagesEquations of Aircraft Motion PDFEva NovitaliaNo ratings yet
- Solutions 1.8-Page 89 Problem 2: e V T V e X T XDocument8 pagesSolutions 1.8-Page 89 Problem 2: e V T V e X T Xukel de guzmanNo ratings yet
- Derivation of Navier Stokes Momentum EquationsDocument2 pagesDerivation of Navier Stokes Momentum EquationsFbgames StefNo ratings yet
- Problem Set 3Document5 pagesProblem Set 3James ConnaughtonNo ratings yet
- AFM Assignment 1 SubmissionDocument7 pagesAFM Assignment 1 SubmissionPrakharNo ratings yet
- Week1-Solutions_handwritten_additionsDocument17 pagesWeek1-Solutions_handwritten_additionsNadaNo ratings yet
- Objective: Figure-1: Rotational Motion of An Object That Moving Through A CircleDocument5 pagesObjective: Figure-1: Rotational Motion of An Object That Moving Through A CircleAbed Alrahman Al SAYYEDNo ratings yet
- Beam BendDocument6 pagesBeam BendELECTRO MECHNo ratings yet
- 2 3 Acceleration Velocity ModelsDocument6 pages2 3 Acceleration Velocity ModelsTuling, Jose Jr., D.No ratings yet
- Tao Xing, Pablo Carrica, and Fred SternDocument11 pagesTao Xing, Pablo Carrica, and Fred Sternalagarg137691No ratings yet
- Uniform Relativistic Acceleration PDFDocument15 pagesUniform Relativistic Acceleration PDFJedwin VillanuevaNo ratings yet
- ENG 233 Lecture Notes 3Document5 pagesENG 233 Lecture Notes 3David Mitry ThomasNo ratings yet
- Extrapolating The Damping Coefficient of Air Resistance For A PendulumDocument3 pagesExtrapolating The Damping Coefficient of Air Resistance For A PendulumbdNo ratings yet
- Ingles Trabajo PDFDocument6 pagesIngles Trabajo PDFJhoa ToledoNo ratings yet
- Relatividad GeneralDocument64 pagesRelatividad GenerallacrimogenoNo ratings yet
- Formula Sheet 1101 CD - FinalDocument2 pagesFormula Sheet 1101 CD - FinalqwaztyprNo ratings yet
- Ejemplo de Performance AnalysisDocument10 pagesEjemplo de Performance Analysisjose aguilarNo ratings yet
- Linear Dynamics of ParticlesDocument9 pagesLinear Dynamics of ParticlesHelloNo ratings yet
- Some Basic Concepts: 1.1 Newtons Law and Inertial FramesDocument16 pagesSome Basic Concepts: 1.1 Newtons Law and Inertial Framestbrackman99No ratings yet
- Homework 3 So LsDocument13 pagesHomework 3 So LsBrad StokesNo ratings yet
- Lecture # 04, Curvilinear Motion (Rectangular Components)Document22 pagesLecture # 04, Curvilinear Motion (Rectangular Components)Khair Bux MazariNo ratings yet
- Rasheef Maths AssignmantDocument10 pagesRasheef Maths AssignmantMohamed SanoosNo ratings yet
- Development - of - An - Integrated - Fuzzy - Logic BallisticDocument36 pagesDevelopment - of - An - Integrated - Fuzzy - Logic BallisticAnais Pesa MozNo ratings yet
- 13.4.1 SISO Sliding-Mode ControlDocument10 pages13.4.1 SISO Sliding-Mode ControlValery Zegarra RodriguezNo ratings yet
- Aerodynamic Damping in The Design of Support Sturctures For Offshore Wind TurbinesDocument9 pagesAerodynamic Damping in The Design of Support Sturctures For Offshore Wind TurbinesAnkur BhatnagarNo ratings yet
- CorrectionsDocument20 pagesCorrectionsMuhammad JamilNo ratings yet
- Derivation of Rigid Body Equations of MotionDocument10 pagesDerivation of Rigid Body Equations of MotionCrash BandicourtNo ratings yet
- Trajectory Calculation: Lab 2 Lecture NotesDocument4 pagesTrajectory Calculation: Lab 2 Lecture NotesDhillonvNo ratings yet
- Physics12 02Document9 pagesPhysics12 02Random PersonNo ratings yet
- EN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Document5 pagesEN40: Dynamics and Vibrations Homework 3: Solving Equations of Motion For Particles Due Friday Feb 13Thuy LinhNo ratings yet
- The Point Form of The Continutiy EquationDocument4 pagesThe Point Form of The Continutiy EquationDASHRATH SINGHNo ratings yet
- Liénard-Wiechert Potentials Describe The ClassicalDocument11 pagesLiénard-Wiechert Potentials Describe The ClassicalJithin PrasadNo ratings yet
- (AAM 13) TrebuchetDocument16 pages(AAM 13) TrebuchetYuriAsronome100% (1)
- Numerical Wave Tank For Study Seakeeping of Amphibious VehicleDocument4 pagesNumerical Wave Tank For Study Seakeeping of Amphibious VehicleBinod KumarNo ratings yet
- Qualifier Study Guide: Office 221 Department of Physics, Florida State University, Tallahassee, FL 32308Document17 pagesQualifier Study Guide: Office 221 Department of Physics, Florida State University, Tallahassee, FL 32308Hussein AlghoulNo ratings yet
- b2 MechanicsDocument9 pagesb2 MechanicsSifei ZhangNo ratings yet
- Mechanics 1: Projectiles, Constrained Motion & FrictionDocument7 pagesMechanics 1: Projectiles, Constrained Motion & Frictionsoumengoswami10No ratings yet
- Homework Set-I For PHY-305A: Physics of The UniverseDocument4 pagesHomework Set-I For PHY-305A: Physics of The UniverseShankar ReddyNo ratings yet
- Weight and Glide Distance of An AicraftDocument7 pagesWeight and Glide Distance of An AicraftAlumni WONG WING HUNGNo ratings yet
- Talkrenyi 3Document19 pagesTalkrenyi 3Srivatsan BalakrishnanNo ratings yet
- Projectile MotionDocument16 pagesProjectile MotionyagofonNo ratings yet
- Lecture 32-Rocket TheoryDocument16 pagesLecture 32-Rocket Theory06me395No ratings yet
- Frequency Response Analysis: Karl D. Hammond January 2008Document14 pagesFrequency Response Analysis: Karl D. Hammond January 2008Trixie NuylesNo ratings yet
- Physics P2 Cheat SheetDocument33 pagesPhysics P2 Cheat SheetfullnameisitNo ratings yet
- CH 2 SolutionsDocument16 pagesCH 2 Solutions박기범No ratings yet
- Odes: Basic Methods: Phys 416/517 Garcia, Chapter 2Document22 pagesOdes: Basic Methods: Phys 416/517 Garcia, Chapter 2jck23216No ratings yet
- 23a OrbitalDocument7 pages23a Orbitalsosasej838No ratings yet
- Aqu4518r1-Pdf Antena TribandaDocument3 pagesAqu4518r1-Pdf Antena TribandaJonathan Gonzalez.LNo ratings yet
- Screen & Conveyorgad, Data Sheet & Qap - SP-1326Document14 pagesScreen & Conveyorgad, Data Sheet & Qap - SP-1326ankit singlaNo ratings yet
- BMEN 301 F2021 Module 3-The Mechanics of Soft TissueDocument18 pagesBMEN 301 F2021 Module 3-The Mechanics of Soft TissueAyesha ANo ratings yet
- Master Notice BETM - ENDocument60 pagesMaster Notice BETM - ENBerat DeğirmenciNo ratings yet
- Machine Model GENPWTwoAxisDocument1 pageMachine Model GENPWTwoAxisManuelNo ratings yet
- AUTOMATIC BACK AND FORTH For AC Powered Trains - Requires 3 Position "E" UNITDocument3 pagesAUTOMATIC BACK AND FORTH For AC Powered Trains - Requires 3 Position "E" UNITLance Montgomery BoyleNo ratings yet
- CM1Document16 pagesCM1WASHIPONG LONGKUMER 2147327No ratings yet
- Question Bank: Prist UniversityDocument12 pagesQuestion Bank: Prist Universityphillipe baillyNo ratings yet
- Ticle Testing - Vegastelmail - Vegastel.lt Index - PHP Faziniu-Gardeliu-SistemaDocument2 pagesTicle Testing - Vegastelmail - Vegastel.lt Index - PHP Faziniu-Gardeliu-SistemaSanket KareNo ratings yet
- Experiment No. 7 Induction Furnace Melting Practice: Aim - TheoryDocument6 pagesExperiment No. 7 Induction Furnace Melting Practice: Aim - TheoryDhananjay ShimpiNo ratings yet
- T1 Relaxation: Exchange Between Parallel and Anti-Parallel SpinsDocument25 pagesT1 Relaxation: Exchange Between Parallel and Anti-Parallel Spinskajal rajNo ratings yet
- Carbide GradesDocument51 pagesCarbide GradesRicardo BravoNo ratings yet
- Ultrasonic Examination Procedure For Asme CodeDocument23 pagesUltrasonic Examination Procedure For Asme CodeEdAlmNo ratings yet
- Electronics Module G10 Q4 Week 1 2Document26 pagesElectronics Module G10 Q4 Week 1 2Florence FernandezNo ratings yet
- ZIGZAG Transformer and Resistance GroundingDocument2 pagesZIGZAG Transformer and Resistance GroundingMichael Camit EsoNo ratings yet
- Medilux 300 MaDocument6 pagesMedilux 300 MaVivek SrivastavaNo ratings yet
- Toyota Celica GT L4 1.8L 1ZZ FEDocument21 pagesToyota Celica GT L4 1.8L 1ZZ FEWolfgang WilliamsNo ratings yet
- Unit 1 Mechanical Engineering and Force VectorDocument32 pagesUnit 1 Mechanical Engineering and Force VectorNÏALNo ratings yet
- SLICE 141 Offical Manual S 716133Document50 pagesSLICE 141 Offical Manual S 716133joseguadalupe19canoNo ratings yet
- The Laplace TransformDocument22 pagesThe Laplace Transformindrayadi2009No ratings yet
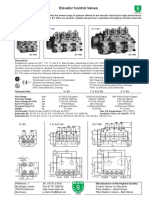
- Elevator Control Valves: EN ISO 9001Document6 pagesElevator Control Valves: EN ISO 9001Jibjab7No ratings yet
- Studies On LightDocument8 pagesStudies On LightLora Angel MartinNo ratings yet
- Comparative Performance Analysis of Lead-Free PeroDocument24 pagesComparative Performance Analysis of Lead-Free PeroMuhammad ShoaibNo ratings yet
- Barad - Agential Cut - 3 - Rouse - Agential Cuts - The Conceptual and Ethical Normativity of Intra-Active PhenomenaDocument12 pagesBarad - Agential Cut - 3 - Rouse - Agential Cuts - The Conceptual and Ethical Normativity of Intra-Active PhenomenaRogerio Duarte Do Pateo Guarani KaiowáNo ratings yet
- 2024 Stoichiometry and SolutionsDocument32 pages2024 Stoichiometry and Solutionsphamgiakhanh112No ratings yet
- Fluid: 2.1 Relative Density (Or Specific Gravity) 3.1 Thrust 3.2 Pressure 3.3 Atmospheric PressureDocument34 pagesFluid: 2.1 Relative Density (Or Specific Gravity) 3.1 Thrust 3.2 Pressure 3.3 Atmospheric PressureArun PravinNo ratings yet
- Department of M Echanical and Industrial Engineering M I 205: Fluid M Echanics Tutorial 5Document1 pageDepartment of M Echanical and Industrial Engineering M I 205: Fluid M Echanics Tutorial 5Ashutosh SinghNo ratings yet
- NITK Surathkal About The FDP RegistrationDocument1 pageNITK Surathkal About The FDP RegistrationKumar ReddyNo ratings yet
- 5.materials of Pharmaceutical Plant ConstructionDocument36 pages5.materials of Pharmaceutical Plant ConstructionJaneNo ratings yet