Download as pdf or txt
You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Esquematico Elec. 320lc7 HyundaiDocument16 pagesEsquematico Elec. 320lc7 HyundaiLuisAntonioVegaParangueo100% (1)
- Blakley Calculator V2.1a - 0Document19 pagesBlakley Calculator V2.1a - 0PauloRicardoNo ratings yet
- Experiment # 7 Load Test of A Three Phase Induction MotorDocument22 pagesExperiment # 7 Load Test of A Three Phase Induction MotorKumar shantanu BasakNo ratings yet
- Electrical SectionDocument3 pagesElectrical SectionVivek BhatnagarNo ratings yet
- Double Cage RotorsDocument17 pagesDouble Cage RotorsweirdwolfvortexNo ratings yet
- Em 2 Chapter 3Document51 pagesEm 2 Chapter 3Sudhanshu SinghNo ratings yet
- Unit I Synchronous Reluctance MotorsDocument10 pagesUnit I Synchronous Reluctance MotorsLaxmikant BagaleNo ratings yet
- Analysis of Induction MachinesDocument70 pagesAnalysis of Induction MachinesKyambi MutiaNo ratings yet
- Induction Motor: From Wikipedia, The Free EncyclopediaDocument7 pagesInduction Motor: From Wikipedia, The Free Encyclopediaadhikari_pradeepNo ratings yet
- Chapter 1 - Introduction To AC MotorDocument13 pagesChapter 1 - Introduction To AC MotorJiachyi YeohNo ratings yet
- Variable Reluctance MotorDocument19 pagesVariable Reluctance MotorSumathra KNo ratings yet
- 3 Phase Induction Motor Construction (Autosaved)Document17 pages3 Phase Induction Motor Construction (Autosaved)ZUBAIRNo ratings yet
- Induction MotorDocument46 pagesInduction MotorSyed Muhammad Munavvar Hussain100% (6)
- Introduction To Induction Motor: Experiment 11Document4 pagesIntroduction To Induction Motor: Experiment 11Apna VeerNo ratings yet
- Reluctance MotorDocument8 pagesReluctance MotorBindu vNo ratings yet
- Prepared by Ap/EeeDocument11 pagesPrepared by Ap/EeeVidhya M PNo ratings yet
- Synchronous MachineDocument9 pagesSynchronous MachineAnonymous rUufA9BUNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- DC Motor ControlDocument10 pagesDC Motor ControlIbrahim KhleifatNo ratings yet
- Notes For Power System 5th SemDocument28 pagesNotes For Power System 5th SemSidhant SharmaNo ratings yet
- Induction MotorDocument4 pagesInduction MotorSenjuti DeNo ratings yet
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- AC MotorDocument22 pagesAC MotorRavindar_Singh0% (1)
- Principles of DC MotorsDocument14 pagesPrinciples of DC MotorsAravind Raj PandianNo ratings yet
- Induction Motor BalaDocument8 pagesInduction Motor Baladinesh11rNo ratings yet
- Electric MotorsDocument11 pagesElectric MotorsAllan Gilbert Manalo JainNo ratings yet
- AC MotorDocument22 pagesAC MotorMoise CristinaNo ratings yet
- History: Electric Motor Alternating Current Stator RotorDocument14 pagesHistory: Electric Motor Alternating Current Stator RotorManas NagNo ratings yet
- Ac Motors: An AC Motor Is An Driven by AnDocument18 pagesAc Motors: An AC Motor Is An Driven by AnBalamuni PsaNo ratings yet
- Unit - IvDocument24 pagesUnit - Ivdurairajgeetha318No ratings yet
- Ee2403-Special Electrical Machines Unit I - Synchronous Reluctance Motor Synchronous Reluctance Motor ConstructionDocument8 pagesEe2403-Special Electrical Machines Unit I - Synchronous Reluctance Motor Synchronous Reluctance Motor ConstructionVijaya KumarNo ratings yet
- Chapter-3 Induction Machines: I E M & P SDocument112 pagesChapter-3 Induction Machines: I E M & P SLim Kai XuanNo ratings yet
- Electrical Machines - Ii E 602Document15 pagesElectrical Machines - Ii E 602sukhendu_debbarma100% (1)
- Three Phase Induction Motor ADocument2 pagesThree Phase Induction Motor AKantharaj ChinnappaNo ratings yet
- A.C. MachineDocument32 pagesA.C. MachinehayikNo ratings yet
- History: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionDocument8 pagesHistory: AC Motor Electromagnetic Induction Slip Rings Commutators Slip-Ring AC Motors Polyphase FrictionegyptonNo ratings yet
- Three-Phase Induction Motor - LongDocument63 pagesThree-Phase Induction Motor - LongTuhin techNo ratings yet
- AC Motor WikipediaDocument10 pagesAC Motor WikipediasmeenaNo ratings yet
- Electrical Machines Lecture 7Document24 pagesElectrical Machines Lecture 7maximelus243No ratings yet
- Induction Motor: This Article Does NotDocument24 pagesInduction Motor: This Article Does Notyashraj786100% (1)
- Induction MotorDocument43 pagesInduction MotorAshvani ShuklaNo ratings yet
- MachinesDocument10 pagesMachinessanjeevani rawatNo ratings yet
- Practical-3 Aim: To study basic principle and construction of 3-ϕ induction motorDocument14 pagesPractical-3 Aim: To study basic principle and construction of 3-ϕ induction motorJay SathvaraNo ratings yet
- Practical-4 Aim: To study basic principle and construction of 3-ϕ induction motorDocument14 pagesPractical-4 Aim: To study basic principle and construction of 3-ϕ induction motorJay SathvaraNo ratings yet
- Principle of Operation of Synchronous Generator - Saravanan T YDocument21 pagesPrinciple of Operation of Synchronous Generator - Saravanan T YStephanie Pena100% (6)
- Induction Motor: by WiresDocument3 pagesInduction Motor: by Wireswajeeh shahNo ratings yet
- Generator: Electromagnetic InductionDocument33 pagesGenerator: Electromagnetic InductionAlvinNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- EE2403 SEM 2 Marks PDFDocument15 pagesEE2403 SEM 2 Marks PDFkesavantNo ratings yet
- Working Principle of An AlternatorDocument31 pagesWorking Principle of An AlternatorDerrick Reyes50% (2)
- Induction Machine TrainerDocument29 pagesInduction Machine TrainerBabyNo ratings yet
- 185 - EE8005, EE6703 Special Electrical Machines - Question BankDocument15 pages185 - EE8005, EE6703 Special Electrical Machines - Question BankNiteshNarukaNo ratings yet
- The Construction of An Alternator Consists of Field Poles Placed On The Rotating Fixture of The MachineDocument5 pagesThe Construction of An Alternator Consists of Field Poles Placed On The Rotating Fixture of The Machinebaralprafulla3100% (1)
- 3 Phase Induction MotorsDocument18 pages3 Phase Induction Motorsdallisrinivas14No ratings yet
- Basics of AC Electric Motors and PartsDocument3 pagesBasics of AC Electric Motors and PartsPankaj Kumar SinghNo ratings yet
- AC Synchronous GeneratorDocument8 pagesAC Synchronous Generatoraswardi8756No ratings yet
- Three Phase Induction MotorDocument3 pagesThree Phase Induction Motor780ANAY GUPTANo ratings yet
- Synchronous MotorDocument16 pagesSynchronous MotorAnand Raman100% (1)
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsFrom EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Brochure SummaryDocument8 pagesBrochure Summaryaleloc2000No ratings yet
- 7SA522 - Distance & DEF Relay-ADocument30 pages7SA522 - Distance & DEF Relay-Am khNo ratings yet
- Unit 2 Converters (Dual Converter)Document12 pagesUnit 2 Converters (Dual Converter)Tenzin JamtshoNo ratings yet
- Front SAM 03-05Document2 pagesFront SAM 03-05Asem AttiaNo ratings yet
- Drivetrain Topologies in Hybrid Electric VehiclesDocument30 pagesDrivetrain Topologies in Hybrid Electric VehiclesPrasanth J M100% (3)
- Reliability Assessment For Traction Transformer Considering Load Characteristics of High-Speed RailwayDocument15 pagesReliability Assessment For Traction Transformer Considering Load Characteristics of High-Speed RailwayAmmar Lateef GakharNo ratings yet
- 2017 GRND BND Part 1Document81 pages2017 GRND BND Part 1Lucio Loyloy Sanchez100% (1)
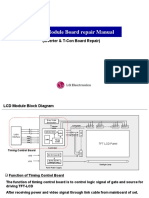
- LCD Module Board Repair ManualDocument21 pagesLCD Module Board Repair ManualCadwill94% (18)
- BA6137Document4 pagesBA6137valbuscapeNo ratings yet
- Tec 1267418Document3 pagesTec 1267418NemkoNo ratings yet
- Gas Insulated SwitchgearDocument31 pagesGas Insulated Switchgearpradip55No ratings yet
- 431MD140A01Document18 pages431MD140A01Atiq_2909No ratings yet
- Railway Axle Power GenerationDocument6 pagesRailway Axle Power GenerationPooja BanNo ratings yet
- XT IEC Power Control: DescriptionDocument188 pagesXT IEC Power Control: DescriptionJuanNo ratings yet
- Ground Bond and Ground Continuity TestingDocument3 pagesGround Bond and Ground Continuity TestingJCLEDJUANNo ratings yet
- Wiring Diagram-Split System Air ConditionerDocument1 pageWiring Diagram-Split System Air ConditionerSohail Ejaz Mirza85% (13)
- NB 65B19 PDFDocument113 pagesNB 65B19 PDFalexNo ratings yet
- Chapter 11: AC Steady State Power: ExercisesDocument11 pagesChapter 11: AC Steady State Power: ExercisesAlejo PtNo ratings yet
- Chapter 11 Wiring/Circuit DiagramsDocument29 pagesChapter 11 Wiring/Circuit Diagramsminoltaep4050No ratings yet
- Day2 Solar1 Developing Engineering Procurement Fendi LimDocument27 pagesDay2 Solar1 Developing Engineering Procurement Fendi LimMuammar ZainuddinNo ratings yet
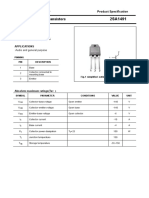
- 2 Sa 1491Document4 pages2 Sa 1491isaiasvaNo ratings yet
- Excel800 enDocument92 pagesExcel800 en刘砚耕No ratings yet
- Operating Instructions: Output ModesDocument2 pagesOperating Instructions: Output ModesreinpolyNo ratings yet
- Annual Report 2010 2011 EnglishDocument76 pagesAnnual Report 2010 2011 EnglishveeruduNo ratings yet
- GIS City Faisalabad Testing ReportDocument76 pagesGIS City Faisalabad Testing Reportsyed waheedNo ratings yet
- 3 Phase Inverter ProposalDocument4 pages3 Phase Inverter ProposalAlan Walker100% (1)
- CBIP Guidelines On Protection: Auto-ReclosingDocument7 pagesCBIP Guidelines On Protection: Auto-Reclosingss_chinniNo ratings yet
- Timer Specifications Intermatic Grasslin FM1D50Document2 pagesTimer Specifications Intermatic Grasslin FM1D50MikeNo ratings yet