Download as pdf or txt
You might also like
- Renault Clio 2 Wiring Diagram PDFDocument14 pagesRenault Clio 2 Wiring Diagram PDFgustavo elbittar100% (5)
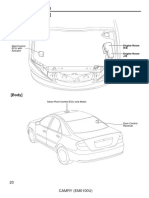
- Toyota Camry 2006 Wiring DiagramsDocument369 pagesToyota Camry 2006 Wiring Diagrams35.Hoàng Xuân TânNo ratings yet
- User/proqrammer Manual: CORY200 DaldossDocument12 pagesUser/proqrammer Manual: CORY200 DaldossDANIEL REYESNo ratings yet
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Jaguar: Electrical Diagnostic ManualDocument176 pagesJaguar: Electrical Diagnostic Manualinfocarsservice.deNo ratings yet
- Ista924 4858Document116 pagesIsta924 4858Anonymous pe2KxeAwNo ratings yet
- ControllerDocument132 pagesControllermohanamarasingheNo ratings yet
- Ist202r02 4858Document68 pagesIst202r02 4858Manuel JuárezNo ratings yet
- Pulse-Width-Modulation Control Circuits Az494A/CDocument13 pagesPulse-Width-Modulation Control Circuits Az494A/CYousri BoughamouraNo ratings yet
- Pulse-Width-Modulation Control Circuits Az494A/CDocument13 pagesPulse-Width-Modulation Control Circuits Az494A/CSebastian CorreaNo ratings yet
- SJ100 QRG NB5821XDDocument24 pagesSJ100 QRG NB5821XDFiq GanuNo ratings yet
- Charging PDFDocument16 pagesCharging PDFred eagle winsNo ratings yet
- Az494a C PDFDocument13 pagesAz494a C PDFJose OpazoNo ratings yet
- Az7500bp - Pulse-Width-Modulation Control CircuitsDocument13 pagesAz7500bp - Pulse-Width-Modulation Control CircuitsArv Juur100% (3)
- User/proqrammer Manual: CORY200 DaldossDocument12 pagesUser/proqrammer Manual: CORY200 DaldossDANIEL REYESNo ratings yet
- Nice ROBO RO 1000Document88 pagesNice ROBO RO 1000duartesilva100No ratings yet
- Pulse-Width-Modulation Control Circuits Az7500CDocument13 pagesPulse-Width-Modulation Control Circuits Az7500CSugeng HariadiNo ratings yet
- Pulse-Width-Modulation Control Circuits Az7500FDocument13 pagesPulse-Width-Modulation Control Circuits Az7500FAkram KareemNo ratings yet
- Unisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitDocument7 pagesUnisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitMantasPuskoriusNo ratings yet
- Pda Mechatro - Handbook 070226Document40 pagesPda Mechatro - Handbook 070226Paul Galvez100% (6)
- A500 Ista500 r1Document72 pagesA500 Ista500 r1Orlando Ossandon G.No ratings yet
- PV PanelDocument17 pagesPV PanelMuhammad RiazNo ratings yet
- AGL 50-OMKAR Controller Parameters - Rev 0Document2 pagesAGL 50-OMKAR Controller Parameters - Rev 0mozhi selvam100% (1)
- FP5452 FeelingTechnologyDocument26 pagesFP5452 FeelingTechnologymartin sembinelliNo ratings yet
- TL494Document7 pagesTL494Share KhNo ratings yet
- BD-201 Roller Driver User ManualDocument9 pagesBD-201 Roller Driver User ManualPhạm BìnhNo ratings yet
- F Relay Locations (Engine Compartment) : 20 Corolla (Em00H0U)Document12 pagesF Relay Locations (Engine Compartment) : 20 Corolla (Em00H0U)Cristiab BurteaNo ratings yet
- Okr t10 Board DatasheetDocument10 pagesOkr t10 Board DatasheetnenjaminzeNo ratings yet
- Light Control Switch Circuit: Wiring DiagramDocument3 pagesLight Control Switch Circuit: Wiring DiagramPhang KumwingNo ratings yet
- Stepper Motor Driver MC3479: ON SemiconductorDocument12 pagesStepper Motor Driver MC3479: ON SemiconductornudufoqiNo ratings yet
- Iv5 - ELIO BOARD ENGLISH MANUAL - V4.0 - B PDFDocument50 pagesIv5 - ELIO BOARD ENGLISH MANUAL - V4.0 - B PDFIsmail100% (2)
- Circuit DescriptionDocument4 pagesCircuit Descriptiongilberto gutierrezNo ratings yet
- Vdocuments - MX 3906 Renault Clio WiringDocument14 pagesVdocuments - MX 3906 Renault Clio WiringJuanito NavarroNo ratings yet
- Pulse-Width-Modulation Control Circuits Az7500EDocument13 pagesPulse-Width-Modulation Control Circuits Az7500EMy shop Cool100% (1)
- NEMA SIMBOLOS (Actualizado, 13-Marzo-2020)Document32 pagesNEMA SIMBOLOS (Actualizado, 13-Marzo-2020)Jose GonzalezNo ratings yet
- 01 MDocument2 pages01 MGuilherme ZoboliNo ratings yet
- CTRL-70 Ui ConDocument20 pagesCTRL-70 Ui Conسکریپ بوائےNo ratings yet
- Terminal Connection Diagramm WiringDocument3 pagesTerminal Connection Diagramm WiringTran Le100% (1)
- Active Phase SelectorDocument3 pagesActive Phase SelectoryashNo ratings yet
- TB6500 PDFDocument18 pagesTB6500 PDFJavier CuraNo ratings yet
- D D D D D D D D D: Description/ordering InformationDocument19 pagesD D D D D D D D D: Description/ordering InformationAlfredo ContrerasNo ratings yet
- D D D D D D D D D: Description/ordering InformationDocument19 pagesD D D D D D D D D: Description/ordering InformationPaul VargasNo ratings yet
- Error Code Manual For ECORAY Generator XR7Document16 pagesError Code Manual For ECORAY Generator XR7Tekniah GlobalNo ratings yet
- Stepping Relay Units: Instruction LeafletDocument4 pagesStepping Relay Units: Instruction LeafletmykedindealNo ratings yet
- 3-A DC Motor Driver TLE 5203: SPT IcDocument18 pages3-A DC Motor Driver TLE 5203: SPT IcJavier CuraNo ratings yet
- Tle5203 Motor Driver PDFDocument18 pagesTle5203 Motor Driver PDFJavier CuraNo ratings yet
- MC74AC14, MC74ACT14 Hex Inverter Schmitt Trigger: High Performance Silicon Gate CMOSDocument8 pagesMC74AC14, MC74ACT14 Hex Inverter Schmitt Trigger: High Performance Silicon Gate CMOSadda chariNo ratings yet
- BL Aisin (30-40lei) at - Full Motores Check PDFDocument112 pagesBL Aisin (30-40lei) at - Full Motores Check PDFJose PoncioNo ratings yet
- Unisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitDocument7 pagesUnisonic Technologies Co., LTD: Voltage Mode PWM Control CircuitManases ChirinosNo ratings yet
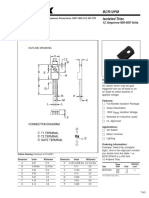
- Bcr12Pm: Outline DrawingDocument6 pagesBcr12Pm: Outline DrawingManuel MartinezNo ratings yet
- DTC 12 Actuator Magnetic Clutch CircuitDocument3 pagesDTC 12 Actuator Magnetic Clutch CircuitIcaro FerreiraNo ratings yet
- KA3525A FairchildSemiconductorDocument7 pagesKA3525A FairchildSemiconductorA.hNo ratings yet
- Schemat Elektryczny SPE125 - 125L - 135S - 160 - 160L - 200 - 200D - 200LDocument20 pagesSchemat Elektryczny SPE125 - 125L - 135S - 160 - 160L - 200 - 200D - 200LMarcin GostołekNo ratings yet
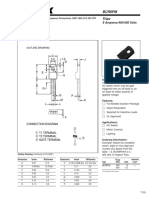
- BCR8PM-12L Datasheet PDFDocument6 pagesBCR8PM-12L Datasheet PDFEdson LiberatoNo ratings yet
- Bcr8Pm: Outline DrawingDocument6 pagesBcr8Pm: Outline DrawingFrank RiosNo ratings yet
- Fan Coil Room Thermostat RDF510, RDF530 : en ZHDocument2 pagesFan Coil Room Thermostat RDF510, RDF530 : en ZHمحمد عليNo ratings yet
- Tu510a enDocument28 pagesTu510a enmenale libayeNo ratings yet
- P643-T2 GregarDocument25 pagesP643-T2 Gregarcj.karthikNo ratings yet
- Features General Description: N-Channel Enhancement Mode Power MOSFETDocument6 pagesFeatures General Description: N-Channel Enhancement Mode Power MOSFETJean GaroniNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Lab Manual ECE 1Document15 pagesLab Manual ECE 1Macky Malupangue100% (1)
- Protection Against Earth Leakage: Lexic RcdsDocument6 pagesProtection Against Earth Leakage: Lexic RcdsLOKMANNo ratings yet
- 100 ManualDocument18 pages100 ManualMilos992No ratings yet
- Disclosure To Promote The Right To InformationDocument20 pagesDisclosure To Promote The Right To InformationSreeram PanigrahiNo ratings yet
- DatasheetDocument2 pagesDatasheetMatthewNo ratings yet
- Determine If The Light Bulb Will deDocument4 pagesDetermine If The Light Bulb Will deSridharan DhanapalNo ratings yet
- Requirements For 69kV Transmission Line LatestDocument1 pageRequirements For 69kV Transmission Line LatestCatrina FedericoNo ratings yet
- Cmos PDFDocument5 pagesCmos PDFSushanth reddyNo ratings yet
- VSD & Swicthboard Flow ChartDocument1 pageVSD & Swicthboard Flow ChartDavide KunNo ratings yet
- Notifier FZM 1 Interface ModuleDocument2 pagesNotifier FZM 1 Interface Modulenastyn-1No ratings yet
- Elk-3 420 1HC0029799 Aj21 enDocument20 pagesElk-3 420 1HC0029799 Aj21 enaalbaki1No ratings yet
- Fast-Front OvervoltagesDocument49 pagesFast-Front Overvoltagessorry2qazNo ratings yet
- Mock Bxe-Unit2Document20 pagesMock Bxe-Unit2kadaNo ratings yet
- Swichies and ConnectorDocument6 pagesSwichies and Connectorkaran007_mNo ratings yet
- Vacuum Circuit Breakers: For Out-Door Use Upto 36KvDocument4 pagesVacuum Circuit Breakers: For Out-Door Use Upto 36KvtoogooodNo ratings yet
- Fiche Technique-Zms CableDocument3 pagesFiche Technique-Zms CableSalim DoumbiaNo ratings yet
- Data Sheet: HSMP-389x Series, HSMP-489x SeriesDocument13 pagesData Sheet: HSMP-389x Series, HSMP-489x SeriesDimitris DimitriadisNo ratings yet
- PRODUCT DATA - AccuRay D5 (Floor Type)Document6 pagesPRODUCT DATA - AccuRay D5 (Floor Type)Nguyen Tien TrinhNo ratings yet
- User's Manual: 6 Channel Mixing ConsoleDocument18 pagesUser's Manual: 6 Channel Mixing ConsoleFrancisco J Rojas GNo ratings yet
- FM-203 Instruction Manual 2019.12.05Document28 pagesFM-203 Instruction Manual 2019.12.05Luis SBNo ratings yet
- POLIM-K enDocument5 pagesPOLIM-K enDejanTomasevicNo ratings yet
- Mitsubishi Gas Insulated SubstationsDocument2 pagesMitsubishi Gas Insulated SubstationsAjit BorseNo ratings yet
- EDC Question BankDocument13 pagesEDC Question BankvenzkrishNo ratings yet
- PSCAD Essential Tutorials - Getting Started and Basic FeaturesDocument5 pagesPSCAD Essential Tutorials - Getting Started and Basic FeaturesGabriel Vinicios Moreira FernandesNo ratings yet
- Power Electronic Capacitors Ver 6Document49 pagesPower Electronic Capacitors Ver 6Калин КалиновNo ratings yet
- D10D632 Electrical Schematic diagram-ENDocument31 pagesD10D632 Electrical Schematic diagram-ENPrakashNo ratings yet
- Acrich 2 Application NoteDocument16 pagesAcrich 2 Application NoteDavis Cap JuniorNo ratings yet
- Upstation GXT 6kva Maintenance Bypass: Ower RotectionDocument20 pagesUpstation GXT 6kva Maintenance Bypass: Ower RotectionSebastian FloresNo ratings yet
- Data Sheet: Genset Controller, GC-1FDocument20 pagesData Sheet: Genset Controller, GC-1FoscarafonsoNo ratings yet
- F4a PDMDR 15M N1Document6 pagesF4a PDMDR 15M N1sts1983No ratings yet