Download as pdf or txt
You might also like
- Sellick SD-80 Operators Manual Nov 1998Document100 pagesSellick SD-80 Operators Manual Nov 1998Louis-Simon Chiasson100% (1)
- Systeemboek Hpvs Evs v20mx Engelsv2 Klein InternetDocument157 pagesSysteemboek Hpvs Evs v20mx Engelsv2 Klein Internetdaniel_jorge_10100% (1)
- Ecu Chevrolet Aveo 1.2 L (Sirius d4)Document5 pagesEcu Chevrolet Aveo 1.2 L (Sirius d4)immanemmNo ratings yet
- Electro Pneumatic Positioner MP-600 SeriesDocument8 pagesElectro Pneumatic Positioner MP-600 SeriesaniketNo ratings yet
- YT 2400 PositionerDocument8 pagesYT 2400 PositionerSandi AslanNo ratings yet
- Data Sheet: SpecificationsDocument3 pagesData Sheet: SpecificationsMarcosNo ratings yet
- Standard Specifications: RS080NFE02Document5 pagesStandard Specifications: RS080NFE02AdrielSilvaNo ratings yet
- Belimo AFX24-SR-S N4 Datasheet En-UsDocument5 pagesBelimo AFX24-SR-S N4 Datasheet En-Usraul sajamaNo ratings yet
- Ficha Técnica FlowCon 0.5 - 1.5 inDocument8 pagesFicha Técnica FlowCon 0.5 - 1.5 infaridbarrozo1996No ratings yet
- GEA34856 - LV7 Platform - FS - LV7000-5to9 - EN - 20220126Document8 pagesGEA34856 - LV7 Platform - FS - LV7000-5to9 - EN - 20220126ahmetNo ratings yet
- 140 Failsafe Series Current To Pressure, (I/P) Electronic ConverterDocument3 pages140 Failsafe Series Current To Pressure, (I/P) Electronic ConvertermohamedNo ratings yet
- Baumer Tdp02 Tdpz02 Ds enDocument4 pagesBaumer Tdp02 Tdpz02 Ds enQamar ZiaNo ratings yet
- PICV DN40-DN50 FlowCon Green3 Tech NoteDocument7 pagesPICV DN40-DN50 FlowCon Green3 Tech Notehvacvn1984No ratings yet
- Technical Data Sheet LMX24-SRDocument3 pagesTechnical Data Sheet LMX24-SRMauricio CalzadaNo ratings yet
- Eexw2 - 400 P 115210 enDocument7 pagesEexw2 - 400 P 115210 enadrbimNo ratings yet
- CKD Ev2500 Catalogue en Cb24saDocument4 pagesCKD Ev2500 Catalogue en Cb24saCommunications ShipyardNo ratings yet
- Valvula Proporcional Norgren 140Document2 pagesValvula Proporcional Norgren 140Base SistemasNo ratings yet
- I/P Signal Converter For Standard Signals: TEIP11Document12 pagesI/P Signal Converter For Standard Signals: TEIP11Ramiro RuizNo ratings yet
- Keller LEO2 ManualDocument1 pageKeller LEO2 ManualHumberto LugoNo ratings yet
- 400W True Sine Wave DC-AC Power Inverter: SeriesDocument2 pages400W True Sine Wave DC-AC Power Inverter: SeriesjavadNo ratings yet
- 90101-2358dea Zx165ufe02001Document5 pages90101-2358dea Zx165ufe02001László NémethNo ratings yet
- FlowCon Green Tech Note PDFDocument8 pagesFlowCon Green Tech Note PDFViệt Đặng XuânNo ratings yet
- FY Series Digital PID Controller Operation Manual: Fy400 Fy700 Fy800 Fy900 Fy600Document50 pagesFY Series Digital PID Controller Operation Manual: Fy400 Fy700 Fy800 Fy900 Fy600Jairo Alonso Correa GutierrezNo ratings yet
- Pressure Transducer: Technical DataDocument4 pagesPressure Transducer: Technical Datamas madNo ratings yet
- Norgreen Ip Converter 140Document3 pagesNorgreen Ip Converter 140roxanaNo ratings yet
- MP16424 3S JapanDocument3 pagesMP16424 3S JapanTrong Hung Nguyen50% (2)
- Maplef Green.0 Green.1Green.2Document8 pagesMaplef Green.0 Green.1Green.2Adam SonNo ratings yet
- Technical Data Sheet AMB24-SRDocument3 pagesTechnical Data Sheet AMB24-SRCaio ValérioNo ratings yet
- Accelerometer With VelocityDocument11 pagesAccelerometer With VelocityAS_865025438No ratings yet
- SM Series Users' Manual: Warning DangerDocument10 pagesSM Series Users' Manual: Warning Dangerවිශාන් යූජින්No ratings yet
- Precision Pressure Transmitter: Technical DataDocument4 pagesPrecision Pressure Transmitter: Technical DataGopal HegdeNo ratings yet
- Semi-Rotary Drive DFPD-80-RP-90-RS60-F0507: Data SheetDocument5 pagesSemi-Rotary Drive DFPD-80-RP-90-RS60-F0507: Data SheetŁukasz OlszewskiNo ratings yet
- Belimo AFRX24-MFT N4 Datasheet En-UsDocument3 pagesBelimo AFRX24-MFT N4 Datasheet En-UsEdmond AndresNo ratings yet
- Tachogenerators: Solid Shaft With EURO Flange B10 or Housing Foot B3 With Own BearingsDocument4 pagesTachogenerators: Solid Shaft With EURO Flange B10 or Housing Foot B3 With Own BearingsauteNo ratings yet
- Triac We SeriesDocument16 pagesTriac We SeriesjohnfranksNo ratings yet
- VS-6556 and VS 6577 Technical Data SheetDocument3 pagesVS-6556 and VS 6577 Technical Data SheetKien Nguyen TrungNo ratings yet
- Actuator - Data SheetDocument40 pagesActuator - Data SheetŁukasz OlszewskiNo ratings yet
- Lua Chon Cong Tac Hanh Trinh Hanyoung HY L800 SeriesDocument5 pagesLua Chon Cong Tac Hanh Trinh Hanyoung HY L800 SeriesThai Phan Tan HoangNo ratings yet
- Dokumen - Tips SMP 7000hDocument8 pagesDokumen - Tips SMP 7000hSAILING BLUESNo ratings yet
- Brochure Optyma ControllerDocument4 pagesBrochure Optyma Controlleryamen.hNo ratings yet
- Surge Protection - EATONDocument39 pagesSurge Protection - EATONxyzNo ratings yet
- Technical Data Sheet SY4U230-MF-TDocument6 pagesTechnical Data Sheet SY4U230-MF-TKyle LanNo ratings yet
- Operation ManualDocument50 pagesOperation ManualSombat MahamadNo ratings yet
- Type 2 Surge Arrester - VAL-MS 800/30 VF/FM - 2805402: Key Commercial DataDocument10 pagesType 2 Surge Arrester - VAL-MS 800/30 VF/FM - 2805402: Key Commercial Datapriyanka236No ratings yet
- 1049 tc544cDocument6 pages1049 tc544cThủy NguyễnNo ratings yet
- MC 5x38 CatalogDocument10 pagesMC 5x38 CatalogJose Rolong CNo ratings yet
- MC-5 Series Micro Processor Temperature Controller: ApplicationDocument10 pagesMC-5 Series Micro Processor Temperature Controller: ApplicationJuan David MontoyaNo ratings yet
- DFPD 300 RP 90 RS60 F0710Document2 pagesDFPD 300 RP 90 RS60 F0710Łukasz OlszewskiNo ratings yet
- Epr 1000 Triac PositionerDocument4 pagesEpr 1000 Triac PositionerAnderson SiqueiraNo ratings yet
- Specifications Robots Collaborative-Robots Duaro Duaro1 en 01 2021Document5 pagesSpecifications Robots Collaborative-Robots Duaro Duaro1 en 01 2021black jackNo ratings yet
- Tokyo Keiki - Radar Level GaugeDocument41 pagesTokyo Keiki - Radar Level GaugeFerry YusufNo ratings yet
- Epl Positioner ManualDocument6 pagesEpl Positioner ManualFlo MarineNo ratings yet
- Transformer Protections: Prepared By, S.BalamuruganDocument32 pagesTransformer Protections: Prepared By, S.BalamuruganBalamurugan SelvarajNo ratings yet
- Datasheet Yonos PARA ST 7 0 iPWM2 - August 2015Document9 pagesDatasheet Yonos PARA ST 7 0 iPWM2 - August 2015Eberg NlnoNo ratings yet
- t400s Sumitomo Splicing MachineDocument2 pagest400s Sumitomo Splicing MachineVrujesh BhattNo ratings yet
- Nf24a SRDocument3 pagesNf24a SRTrunghieu LeNo ratings yet
- SVP3000 Alphaplus: Smart Valve Positioner With HART Communication Protocol Model AVP302Document8 pagesSVP3000 Alphaplus: Smart Valve Positioner With HART Communication Protocol Model AVP302鄭元豪No ratings yet
- Manual AT-3200D Kit Entrenamiento de Antenas PDFDocument135 pagesManual AT-3200D Kit Entrenamiento de Antenas PDFAndrea SanchezNo ratings yet
- Service Manual: Color LCD Fish FinderDocument26 pagesService Manual: Color LCD Fish FinderHenry AlvaxNo ratings yet
- Technical Data Sheet BFGT230Document3 pagesTechnical Data Sheet BFGT230mojtabaNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Control Valves For Cargo PumpsDocument14 pagesControl Valves For Cargo Pumpsjuan saezNo ratings yet
- STC Cleaning ProcedureDocument1 pageSTC Cleaning Procedurejuan saezNo ratings yet
- Alphatronic3000 Pi - 5510 0141 01 - LowDocument42 pagesAlphatronic3000 Pi - 5510 0141 01 - Lowjuan saezNo ratings yet
- sl2016 633 PDFDocument8 pagessl2016 633 PDFjuan saezNo ratings yet
- Turbocharger NAS and NAT Turbine Gas-Admission Casing and Nozzle Ring Cus196e (2003 07)Document2 pagesTurbocharger NAS and NAT Turbine Gas-Admission Casing and Nozzle Ring Cus196e (2003 07)juan saezNo ratings yet
- The Daily Grind - Cat Fines and Engine Wear, Part 2Document6 pagesThe Daily Grind - Cat Fines and Engine Wear, Part 2juan saezNo ratings yet
- Marine Essentials 2018Document187 pagesMarine Essentials 2018juan saezNo ratings yet
- Alfa Laval Flow Optimization White PaperDocument3 pagesAlfa Laval Flow Optimization White Paperjuan saezNo ratings yet
- The Alfa Laval Adaptive Fuel Line Bluebook: Technical Reference Booklet - 2018 EditionDocument38 pagesThe Alfa Laval Adaptive Fuel Line Bluebook: Technical Reference Booklet - 2018 Editionjuan saezNo ratings yet
- Hapag-Lloyd Presentation IMO2020 For Greener ShippingDocument22 pagesHapag-Lloyd Presentation IMO2020 For Greener Shippingjuan saezNo ratings yet
- Tensores Poly VDocument8 pagesTensores Poly VmaxipolattoNo ratings yet
- PD200Document5 pagesPD200onur tezmanNo ratings yet
- Airfix Magazine - Volume 8 7Document47 pagesAirfix Magazine - Volume 8 7Cem AvciNo ratings yet
- Caterpillar Cat Forklifts Spec F744ceDocument16 pagesCaterpillar Cat Forklifts Spec F744ceRojasNo ratings yet
- ABB Motors ManualsDocument146 pagesABB Motors ManualsRama Samy100% (2)
- Lube Gard AtfDocument249 pagesLube Gard Atfjuan garcia guerra100% (1)
- Mws83fc & Mws83fd BreakdownDocument1 pageMws83fc & Mws83fd BreakdownCristhian MataNo ratings yet
- Cub Cadet Parts Manual For Model 2130 Tractor SN 239001 326005Document7 pagesCub Cadet Parts Manual For Model 2130 Tractor SN 239001 326005chandra100% (34)
- F23 Q3 - RLP Policy - 02-11-2022 - 03-05-35Document2 pagesF23 Q3 - RLP Policy - 02-11-2022 - 03-05-35huzaifa ShakirNo ratings yet
- Contribution of Aluminium To The Multi-Material Light-Weight BIW Design of SLCDocument12 pagesContribution of Aluminium To The Multi-Material Light-Weight BIW Design of SLCKivanc SengozNo ratings yet
- PAI Industries, Inc. - Catalog Tambor de FrenoDocument2 pagesPAI Industries, Inc. - Catalog Tambor de FrenoAlexis ValleNo ratings yet
- kl701 ManualDocument120 pageskl701 ManualDragoljub DjordjevicNo ratings yet
- Bobcat Online Parts Catalog - Drive Train - S530 - 8-21-2023 4 - 15 - 06 PMDocument3 pagesBobcat Online Parts Catalog - Drive Train - S530 - 8-21-2023 4 - 15 - 06 PMKevin John AmbidaNo ratings yet
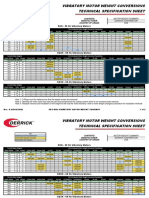
- PE-S-088 - Vibratory Motor Weight SummaryDocument2 pagesPE-S-088 - Vibratory Motor Weight SummaryVictor Barrios RiosNo ratings yet
- Mechanical Dept IndentDocument27 pagesMechanical Dept IndentPankaj PandeyNo ratings yet
- M3 - Rear Damper Mount UpperDocument29 pagesM3 - Rear Damper Mount UpperDongTaNo ratings yet
- Wa0090.Document166 pagesWa0090.nader sabbahNo ratings yet
- Repair Instruction For Engine Repair Manual: PrecautionDocument3 pagesRepair Instruction For Engine Repair Manual: PrecautionHenry SilvaNo ratings yet
- Reimagining Enterprise Innovation Through Crowdsourcing: ManufacturingDocument19 pagesReimagining Enterprise Innovation Through Crowdsourcing: ManufacturingcpkakopeNo ratings yet
- Circuit DiagramsDocument110 pagesCircuit Diagramsslam9No ratings yet
- VIN Model Series/model Designation Ordernumber License PlateDocument3 pagesVIN Model Series/model Designation Ordernumber License PlateMuhammad AlwiNo ratings yet
- Outline - Car Baby SeatsDocument2 pagesOutline - Car Baby SeatsPetre BalitonNo ratings yet
- 2020 Cadillac ct5 Owners Manual PDFDocument359 pages2020 Cadillac ct5 Owners Manual PDFRAIN QINo ratings yet
- Cylinder Filling Pumps For Co2 Leaflet Al1442Document4 pagesCylinder Filling Pumps For Co2 Leaflet Al1442mithun kotianNo ratings yet
- Universal Testing MachineDocument14 pagesUniversal Testing MachineMoreno, Leanne B.100% (1)
- Moin - Vehicle PerformanceDocument16 pagesMoin - Vehicle PerformanceMOIN SHAIKHNo ratings yet