Professional Documents
Culture Documents
Lab Manual
Lab Manual
Uploaded by
chawara779Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Lab Manual
Lab Manual
Uploaded by
chawara779Copyright:
Available Formats
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 16-Oct-2023
Experiment No. 1a
Title
Transmission ratio of the Transformer Board.
Objective
To determine the transmission ratio of the transformer built-in in the Transformer Board.
Apparatus
Transformer board
Connecting wires
Voltmeter
Experimental Setup
1 | Page Electrical Machines-II LAB (EE-352)
Procedure
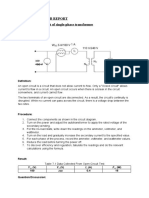
Firstly, I set up the circuit as shown.
Then I measured the winding voltages U1 and U2. Then entered the measured values in
table.
I repeated the above steps for measurements of circuit (b).
Using formulas, I calculated the transmission ratio once from the measured voltage values
and once from the number of windings.
Lastly, I entered these values in the table.
Primary side: N1=1978 Secondary side: N2=N3=1110
Observation and Measurements
Transmission ration
Transmission ratio
Circuit U1 U2 determined from number of
determined from voltages
turns
a) 248V 276V 1.11 1.12
b) 248V 138V 0.56 0.56
Conclusion
After executing this experiment, I concluded that the of transmission ratio obtained from
voltages is similar to its value obtained from number of turns.
Evaluation
What do you discover when you relate the transmission ratio calculated from the
voltages with the transmission ratio calculated from the number of windings?
After observing the turn ratio from both of the methods, it can easily be concluded that both
of their values are almost same, rather the values obtained from voltage ratio was more
precise.
Why transmission ratio not exactly ‘1’ in a transformer having similar primary and
secondary voltage?
The turn ratio can possible to be ‘1’only and only if it is an ideal transformer but in real life it
does not exist so that is why it cannot be exactly ‘1’.
2 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 16-Oct-2023
Experiment No. 1b
Title
Current and voltage ratios on load of transformer.
Objective
To measure the load current IL and the secondary voltage VL on different types of loads
(resistive, inductive and capacitive load).
Apparatus
Transformer board
Voltmeter
Ammeter
Theory
The ratio of primary current to the secondary current is called Current Ratio of transformer.
The ratio of the number of turns in the secondary winding to the number of turns in the
primary winding is called Transformation Ratio. The ratio of primary voltage to the
secondary voltage is known as the Voltage Ratio. Load on transformer is the measure of
power that flows through the transformer. Though, the transformer load can also be a
regulator to adjust the output. The adjustments can be in the form of power obtained by the
appliances or the modified voltage flow to the receiving equipment.
Experimental Setup
Primary Side
Primary side remains same in all circuit connections
Secondary Side
3 | Page Electrical Machines-II LAB (EE-352)
Procedure
Firstly, I checked the components for working.
I set up the circuit as shown.
Then, I measure IL and U2 first in no-load condition and entered the measured values in
table.
I repeated the measurements for resistive, inductive and capacitive load.
I recorded all the valued in Table.
I plotted graph of U2 against IL.
Observations and Measurements
Load U2 IL
(a) 276V 30µA
(b) 262V 60mA
(c) 270V 103mA
(d) 281V 67mA
Load Characteristics of Transformer
285
Load Voltage VL (V)
280
275
270
265
260
255
250
0 20 40 60 80 100 120
Load Current IL (mA)
Conclusion
By this experiment I concluded that if primary voltage is fixed, then for different types of
loads, the value of output current will vary. Current is near zero for no load. When load is
applied to the transformer the current increases steadily. The values of current vary for
different types of loads but output voltage will remain the same.
Evaluation
How does the transformer behave on different loads?
4 | Page Electrical Machines-II LAB (EE-352)
If primary voltage is kept constant, then for different types of loads, output current will vary.
The value of current is near zero for no-load. For inductive load, current increased w.r.t
resistive load and for capacitive load it was a bit lower than that of resistive load.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 23-Oct-2023
Experiment No. 2a
Title
No load characteristics of transformers.
Objective
The aim of this experiment is to measure and record the no-load characteristic of transformer.
Apparatus
Transformer board
Voltmeter
Ammeter
Theory
The ratio of primary current to the secondary current is called Current Ratio of transformer.
The ratio of the number of turns in the secondary winding to the number of turns in the
primary winding is called Transformation Ratio. The ratio of primary voltage to the
secondary voltage is known as the Voltage Ratio. Load on transformer is the measure of
power that flows through the transformer. Though, the transformer load can also be a
regulator to adjust the output. The adjustments can be in the form of power obtained by the
appliances or the modified voltage flow to the receiving equipment.
5 | Page Electrical Machines-II LAB (EE-352)
Experimental Setup
Procedure
1. First, I set up the circuit shown in figure. The board remained switched off in this
experiment.
2. Then I set the no-load voltage Uo according to the voltage values asked for in the table.
3. Then measured the no-load current Io for each voltage value and entered it in the table.
4. Using the values from the table, I plotted the no-load characteristics.
Observations and Measurements
Output Voltage Uo (V) 0 25 50 75 100 125 150 175 200
Output Current Io (mA) 0.55 5.99 7.65 8.82 10.1 12.1 13.4 15.1 17.4
6 | Page Electrical Machines-II LAB (EE-352)
No-load Charecteristics of Transformer
20
18
Output Voltage UO (V)
16
14
12
10
8
6
4
2
0
0 50 100 150 200 250
Output Current IO (mA)
Conclusion
After performing this experiment, we can conclude that when a transformer is operated at no
load, the secondary winding is open-circuited. So, no current will flow through it. While some
current will flow through the primary winding.
Evaluation
Why is the current characteristics being not a straight line?
This is because of the non-linear behavior of magnetizing curve of ferromagnetic core. As the
applied voltage is increased beyond the knee-point, the increase in no load current required to
produce significant change in flux becomes high.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 23-Oct-2023
Experiment No. 2b
Title
No load losses of transformers.
Objective
7 | Page Electrical Machines-II LAB (EE-352)
The objective of this experiment is to determine the no-load iron losses of transformers.
Apparatus
• Trainer board
• Voltmeter
• Ammeter
• Power meter
Theory
The ratio of primary current and secondary current is called Current Ratio of transformer. The
transformation ratio is defined as the ratio of the number of turns in the secondary winding to
the number of turns in the primary winding. The ratio of primary voltage to secondary voltage
is known as the voltage ratio. Load on transformer is the amount of power that flows through
the transformer. Though, the transformer load can also be a regulator to adjust the output. The
adjustments can be in the form of power obtained by the appliances or the modified voltage
flow to the receiving equipment.
Experimental Setup
Procedure
1. I set up the circuit as shown in the figure.
2. Then switched on the Transformer Board.
3. Using the meters, I measured applied primary rated voltage U 1N, the no-load current Io, and
the active power Po.
4. Then using the formulas, I calculated the no-load power factor cosϕ.
5. I also calculated the partial currents IFe and I of the equivalent circuit diagram.
6. Lastly, I calculated the transverse resistance RFe.
Results
After performing experiment, I acquired following observations,
8 | Page Electrical Machines-II LAB (EE-352)
No-load Current = Io = 0.016A = 16mA
Applied Rated Voltage = Uin = 232V
Active Power = Po = 3.5W
Then from the above observations, I calculated the required values,
Power Factor = cosΦ = Po/Io*Uin = 3.5/0.016*232 = 0.943
Φ = cos-1(0.943) = 19.44
Magnetizing current = Ife = IocosΦ = 0.016*0.943 = 0.015A
Iron loss current = Iu = IosinΦ = 0.016*sin(19.44) = 0.0053A
Io = Ife+Iu = 0.0369+0.018 = 0.0203A
No load resistance = Rfe = Ro = Uin/Io = 232/0.0203 =11.4kΩ
Conclusion
After performing this experiment, I concluded that in a transformer, no-load losses are
produced by the magnetizing current required to energize the transformer’s ferromagnetic
core. These losses do not change with the change in transformer’s load.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 30-Oct-2023
Experiment No. 03
Title
9 | Page Electrical Machines-II LAB (EE-352)
Short Circuit Experiment
Objective
To determine the copper losses of transformer by short-circuiting its secondary winding.
Apparatus
• Transformer board
• Power meter
• Ammeter
• Voltmeter
Experimental Setup
Procedure
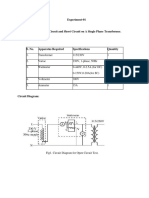
1. Firstly, I set up the circuit shown in above.
2. Then, I increased the input voltage with the regulating transformer until the rated current
I1N = 0.14A flows in the output winding.
3. I then measured voltage U1k which leads to rated current and recorded short-circuit power
Pk.
4. Calculated the short-circuit power factor cos φk.
5. After that, I calculated partial voltages U R and Uσ from measured variables. The
equivalent circuit diagram opposite applies the short-circuit experiment supplies partial
voltages.
6. The relative short circuit voltage of transformer which is specified on power rating plate
can be calculated from these variables. Calculate this voltage. The rated voltage is
U1N=400V AC.
7. I calculated the variables for the full equivalent circuit diagram with these resistance
values.
8. Lastly, I calculated the real variable of the complete equivalent circuit diagram. To do this
I used the already determined transformation ratio ü = 0.89 and the mains frequency f =
50Hz.
Results
After performing this experiment, I got following observations,
10 | Page Electrical Machines-II LAB (EE-352)
Applied Voltage = U1k = 26.05V
Short-circuit Power = Pk =1.5W
Rated Current = Iin = 0.41A
Rated Voltage = Uin = 400V
Then by observed values I calculated following values,
cosϕK= Pk/(Iin*U1K) = 1.5/0.41*26.05 = 0.14
UR = U1K*cosϕK = 26.05*0.14 = 3.647V
cosΦ = 0.14
Φ = cos-1(0.14) = 81.950
Uo= U1K*sinϕK = 26.05*sin(81.95) = 25.79V
uk = (U1K/U1N)*100% = 26.05/400*100 = 6.51%
Conclusion
After performing this experiment, I concluded that the copper losses of a transformer can be
determined with the short-circuit experiment. To do this the secondary winding is short
circuited and the voltage on the primary winding increased from 0V until the rated current
flows on the secondary side.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 30-Oct-2023
11 | Page Electrical Machines-II LAB (EE-352)
Experiment No. 4a
Title
Down transformation of voltages on no load.
Objective
Determine the voltage ratios of transformer on no-load.
Theory
The auto-transformer is a unique version of a transformer. It is different from a normal two-
winding transformer by having only one common winding. The winding is separated into two
parts, the series and parallel winding. To transform up the input voltage, U1 must be applied at
the parallel winding and the output voltage U 2 must be applied at series winding. As a result,
U2 is higher than U1.
The benefit of auto-transformer is the reduction of winding copper and core iron. The
efficiency of auto-transformers can be up to 99.8%. The total possible power output of an
auto-transformer is known as the throwline power SD. It is transmitted by the current line of
input winding and the magnetic flow of iron core. The more the transmission ratio ü
approaches the value ‘1’, the smaller the power transmitted with induction at constant through
line power (SD = U2 x I2).
Experimental Setup
Procedure
1. Firstly, I checked components for working.
2. I set up the circuit shown in figure.
3. I measured the input voltage U1 and the output voltage U2 of the auto-transformer.
4. Then I calculated the output voltage U2 with the number of windings N1=1978 and
N2=1462.
Result
By performing experiment, I got following measurements,
Measured Input Voltage = U1 = 234.4V
Measured Output Voltage = U2 = 98.9V
12 | Page Electrical Machines-II LAB (EE-352)
Using formula,
Calculated Output Voltage = U2 = U1*N2/(N1+N2) = 234.4*1462/(1978+1462) = 99.6V
Evaluation
What do you ascertain when you compare the transmission ratio calculated from the
voltages with the transmission ratio calculated from the number of windings?
Measured and calculated value of the output voltage U2 matched very well. The transformer
basic equation can therefore be used for the auto-transformer as well.
Why is the transmission ratio not exactly ‘1’ in a transformer with equal primary and
secondary voltage?
Real transformers do not have perfect coupling. They have leakage inductance which appears
as a series inductance in each winding that does not couple to other winding inductances. This
reduces the voltage a little from a secondary winding. This is the reason, why transmission
ratio is not exactly 1.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 30-Oct-2023
Experiment No. 4b
13 | Page Electrical Machines-II LAB (EE-352)
Title
Transformation ratio on auto-transformer on load.
Objective
To set up an auto-transformer with the Transformer Board and examine the voltage ratios on
load.
Apparatus
• Transformer board
• Ammeter
• Voltmeter
Theory
The auto-transformer is a unique version of a transformer. It is different from a normal two-
winding transformer by having only one common winding. The winding is separated into two
parts, the series and parallel winding. To transform up the input voltage, U1 must be applied at
the parallel winding and the output voltage U2 must be applied at series winding.
The benefit of auto-transformer is the reduction of winding copper and core iron. The
efficiency of auto-transformers can be up to 99.8%. The total possible power output of an
auto-transformer is known as the throwline power SD. It is transmitted by the current line of
input winding and the magnetic flow of iron core.
Experimental Setup
Procedure
1. First, I switched the board on and measure the mains voltage U1.
2. Then I switched the board back off.
3. I then set up the circuit shown in figure.
4. Lastly, I measured the output voltage U2 of the auto-transformer.
Result
14 | Page Electrical Machines-II LAB (EE-352)
From this experiment I got following observations,
Input voltage = U1 = 235V
Output Voltage = U2 = 96V
Evaluation
How does the transformer behave on different loads?
For inductive load, if the transformer supplies a low lagging power factor, large secondary
current will flow which results in bad voltage regulation because of greater voltage drops in
the winding. For capacitive load, the output voltage will rise. Hence, positive regulation
generates a voltage drop in the winding while a negative regulation generates a voltage rise in
the winding.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 30-Oct-2023
Experiment No. 5a
Title
15 | Page Electrical Machines-II LAB (EE-352)
Up transformation of voltages of auto-transformer on no-load.
Objective
To set up an auto-transformer using Transformer Board and examine the voltage ratios on no
load.
Apparatus
• Transformer board
• Ammeter
• Voltmeter
Theory
The auto-transformer is a unique version of a transformer. It is different from a normal two-
winding transformer by having only one common winding. The winding is separated into two
parts, the series and parallel winding. To transform up the input voltage, U1 must be applied at
the parallel winding and the output voltage U2 must be applied at series winding.
The benefit of auto-transformer is the reduction of winding copper and core iron. The
efficiency of auto-transformers can be up to 99.8%. The total possible power output of an
auto-transformer is known as the throwline power SD. It is transmitted by the current line of
input winding and the magnetic flow of iron core.
Experimental Setup
Procedure
1. Firstly, I checked components for working.
2. I set up the circuit according to the given experimental setup.
3. Then I measured the input voltage U1 and the output voltage U2 of the auto-transformer.
4. Then I calculated the output voltage U2 with the numbers of windings N1=1978, N2=1462.
Result
From this experiment I got following observations,
16 | Page Electrical Machines-II LAB (EE-352)
Input voltage = U1 = 234V
Output Voltage = U2 = 401V
Calculated value from numbers of turns is,
Measured Output Voltage = U2 = U1*(N1+N2)/N1
=220*(1978+1462)/1978 = 387.8V
Evaluation
What do you determine when you compare the measured and calculated value of the
output voltage U2?
Measured and calculated value of the output voltage U2 match very closely. The transformer
basic equation can therefore be used for the auto-transformer as well.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 30-Oct-2023
Experiment No. 5b
17 | Page Electrical Machines-II LAB (EE-352)
Title
Up transformation of auto-transformer on load.
Objective
Set up an auto-transformer with the Transformer Board and examine the voltage ratios on
load.
Apparatus
• Transformer board
• Ammeter
• Voltmeter
Theory
The auto-transformer is a unique version of a transformer. It is different from a normal two-
winding transformer by having only one common winding. The winding is divided into two
parts, the series and parallel winding. To transform up the input voltage, U1 must be applied at
the parallel winding and the output voltage U2 must be applied at series winding.
The benefit of auto-transformer is the reduction of winding copper and core iron. The
efficiency of auto-transformers can be up to 99.8%. The total possible power output of an
auto-transformer is known as the throwline power SD. It is transmitted by the current line of
input winding and the magnetic flow of iron core.
Experimental Setup
Procedure
1. First of all, I checked the components for working.
2. Then I switched the board on and measure main voltage U 1. Then switched the board back
off.
3. I set up the circuit according to the given experimental setup. Because of the projected
high output voltage U2 two lamps must be connected in series.
4. Then I measured the output voltage U2 of the auto- transformer.
18 | Page Electrical Machines-II LAB (EE-352)
Result
From this experiment I got following observations,
Input Voltage = U1 = 221V
Output Voltage = U2 = 376V
Evaluation
How intensely does the output voltage drop under load in contrast with no-load? What
are the reasons for the drop?
The output voltage will decrease with the increase in load. The drop is caused by series
resistance and reactance of series inductance in both primary and secondary windings. This
inductance is the product of mutual inductance between the windings.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 06-Nov-2023
Experiment No. 06
19 | Page Electrical Machines-II LAB (EE-352)
Title
Commissioning and no-load characteristic of the synchronous generator.
Objective
The aim of this experiment is to Operate the synchronous machine as a generator and
determine the no-load characteristic.
Apparatus
• Synchronous Machine (Type 2711)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Multimeter
• Connecting wires
Theory
In synchronous machines, the rotor speed is synchronized with the speed of the rotor
magnetic field. When operating as a generator, the rotor magnetic field is generated by a
rotating permanent magnet or electromagnet. Synchronous machines are mainly used as
generators. Synchronous machines consist of a stator with a winding and a rotor which also
carries further winding.
There are different designs dependent on the task and area of purpose like Internal-Pole
Machine and External-Pole Machines. A magnetic field established by a direct current
supplied to the exciter winding is needed in the generator for yielding energy. The required
exciting power for the pole wheel is 0.25 to 5 % of the rated power reliant on the size of the
machine. In synchronous machines, there are three types of excitations:
Self-excitation
This type of excitation occurs when portion of the energy generated by the generator is spent
for excitation.
Direct-connected excitation
The exciting power is produced by a small supplementary generator affixed on the shaft and
then served to the main generator. The direct-connected excitation is the type of excitation
favored for safety purposes.
Separate excitation
In this type of excitation, the necessary excitation energy is fed in by an external power
supply.
Experimental Setup
20 | Page Electrical Machines-II LAB (EE-352)
Procedure
1. I pushed the experimental machine onto the Brake Unit and coupled it with braking
machine.
2. Then, I fixed the machine by pulling the clamping lever towards the braking machine.
3. I set up the circuit as shown in figure.
4. I Connected the motor to the 400 V mains in star circuit.
5. Then I set the excitation of the Universal Power Supply to left and stopped (0 V).
6. I switched on Control Unit and started braking Unit and switched on Universal Power
Supply.
7. I watched the direction-of-rotation display. The machine turned to the right.
8. Then I switched off the Universal Power Supply.
9. And I made the following settings on the Control Unit:
10. I set Operation mode switched to MANUAL.
11. I Observed the setting of the torque attenuator.
12. I Set point switch INT/EXT to ‘internal’ position.
13. I Set the speed to 1500 rpm (rated speed).
14. Then I switched on the Universal Power Supply.
15. I increased the excitation step by step to the current values (measuring range: 1 A DC)
given in table below and measured the no-load voltage U0 (measuring range: 1000 V
AC).
16. To finish the experiment, I switched off the Universal Power Supply and then Control
Unit.
17. I determined the value of the exciting current at 400 V from the characteristic.
Results and Observations
21 | Page Electrical Machines-II LAB (EE-352)
Exciting Current
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
IE (A) No-load Charecteristics of Synchronous Generator
450
Output Voltage
8 120 228 299 349 378 396 400
(V) 400
Output Voltage (V)
350
300
250
200
150
100
50
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Excitation Current (A)
Conclusion
After performing this experiment, I concluded that at no load,
• The voltage increases when excitation current is increased.
• A magnetic flow is produced dependent on excitation.
• The characteristic curve corresponds to that of DC generator.
• The synchronous generator is separately excited in this experiment.
Evaluation
What do you learn from the no-load characteristic?
If you look at the graph, you can see that the voltage increases when the exciting current
increases. The greater the synchronous generator is excited, the greater the saturation due to
iron materials which leads to a non-linear characteristic curve.
How is the synchronous generator excited in this experiment?
Since the necessary excitation energy in this experiment is supplied by an external power
supply, the synchronous generator is separately excited.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 13-Nov-2023
Experiment No. 07
22 | Page Electrical Machines-II LAB (EE-352)
Title
Load characteristic of the synchronous generator.
Objective
The aim of this experiment is to operate the synchronous machine as a generator and
determine its load characteristic.
Apparatus
• Synchronous Machine (Type 2711)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Multimeter
• Connecting wires
Theory
In synchronous machines, the rotor speed is synchronized with the speed of the rotor
magnetic field. When operating as a generator, the rotor magnetic field is generated by a
rotating permanent magnet or electromagnet. Synchronous machines are mainly used as
generators. Synchronous machines consist of a stator with a winding and a rotor which also
carries further winding.
There are different designs dependent on the task and area of purpose like Internal-Pole
Machine and External-Pole Machines. A magnetic field established by a direct current
supplied to the exciter winding is needed in the generator for yielding energy. The required
exciting power for the pole wheel is 0.25 to 5 % of the rated power reliant on the size of the
machine. In synchronous machines, there are three types of excitations:
Self-excitation
This type of excitation occurs when portion of the energy generated by the generator is spent
for excitation.
Direct-connected excitation
The exciting power is produced by a small supplementary generator affixed on the shaft and
then served to the main generator. The direct-connected excitation is the type of excitation
favored for safety purposes.
Separate excitation
In this type of excitation, the necessary excitation energy is fed in by an external power
supply.
Experimental Setup
23 | Page Electrical Machines-II LAB (EE-352)
Procedure
1. First of all, I checked all the components if they are working properly.
2. I Set up the experiment as shown in figure.
3. Then I set the speed of Break Unit to 1500 rpm and the Excitation Current to 0.95 A.
4. I Set the potentiometer of the load resistor R1 to the left stop (1kW).
5. I Set the values of the load current I L one after the other with the load resistor and
measured the load voltage UL generated by the generator.
6. After all this, I switched off the Universal Power Supply first and then the Control Unit.
7. Then I drew the load characteristics of synchronous generator.
Load Current IL (A) 0.2 0.3 0.4 0.5 0.6 0.7
Load Voltage VL (V) 416 397 372 335 290 230
Load Resistor R 1 + R2 R 1 + R2 R1 R1 R1 R1
Observations and Measurements
Load Charectersitics of Synchronous Generator
450
400
Load Voltage UL (V)
350
300
250
200
150
100
50
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
Load Current IL (A)
Conclusion
After performing this experiment, I concluded that when load is applied to the synchronous
generator, its load voltage decreases but current increase.
Evaluation
What is the operating principle of synchronous generator designed in this experiment?
In this experiment the energy produced by the synchronous generator is fed directly to the
load. This operating principle is known as island operation. In this case the synchronization
conditions are not needed to be observed. Voltage and frequency must be kept constant to the
load.
24 | Page Electrical Machines-II LAB (EE-352)
What do you learn from load characteristics?
I learned that when load is applied to the synchronous generator, its load voltage decreases
but current increase.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 20-Nov-2023
Experiment No. 08
Title
Mains synchronization and control characteristic of the synchronous generator
Objective
Synchronize the synchronous generator with the aid of the synchronizing dark method so that
it operates parallel to the three-phase mains. Calculate the active power which the generator
feeds to the mains. Determine the control characteristic IL = f (IE) for cos j = 1.
Apparatus
• Synchronous Machine (Type 2711)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Synchronization with Lamps (Type 2289)
• Power factor meter (10 A)
• Multimeters
Theory
In synchronous machines, the rotor speed is synchronized with the speed of the rotor
magnetic field. When operating as a generator, the rotor magnetic field is generated by a
25 | Page Electrical Machines-II LAB (EE-352)
rotating permanent magnet or electromagnet. Synchronous machines are mainly used as
generators. Synchronous machines consist of a stator with a winding and a rotor which also
carries further winding.
There are different designs dependent on the task and area of purpose like Internal-Pole
Machine and External-Pole Machines. A magnetic field established by a direct current
supplied to the exciter winding is needed in the generator for yielding energy. The required
exciting power for the pole wheel is 0.25 to 5 % of the rated power reliant on the size of the
machine. In synchronous machines, there are three types of excitations:
Self-excitation
This type of excitation occurs when portion of the energy generated by the generator is spent
for excitation.
Direct-connected excitation
The exciting power is produced by a small supplementary generator affixed on the shaft and
then served to the main generator. The direct-connected excitation is the type of excitation
favored for safety purposes.
Separate excitation
In this type of excitation, the necessary excitation energy is fed in by an external power
supply.
Experimental Setup
Experimental procedure
1. First, I set up the experiment as shown in figure.
2. I made sure that the synchronizing dark method or Synchronization is switched off.
26 | Page Electrical Machines-II LAB (EE-352)
3. Then I started up the system and set the excitation on Universal Power Supply to left
stop.
4. Then I set the speed to 1500 rpm and the exciting current to 0.95 A.
5. And I checked with both voltmeters whether the voltage UL produced by the generator
and the main voltage are the same. If not, I matched the voltages with the excitation.
6. I observed the lamps of the synchronizing dark method. If all three lamps are dark, the
generator is synchronized.
7. I Switched on the synchronization if generator was synchronized (switch on position 1).
8. In the end, I Switched off the system.
9. And I calculated the active power which the generator feeds to the mains.
10. I drew the control characteristics in the prepared diagram and determined the scale for IE.
Results and Observations
Load current IL (A) 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 cosθ
Excitation Current IE (A) 0.55 0.56 0.60 0.66 0.72 0.82 0.91 1.0 1
Control Charecteristics of Synchronous Generator
0.9
0.8
0.7
Load Current IL(A)
0.6
0.5
0.4
0.3
0.2
0.1
0
0.5 0.6 0.7 0.8 0.9 1 1.1
Excitation Current IL(A)
Conclusion
By this experiment I concluded that, 1. The control characteristics tells us how much load
current flows at how much excitation. 2. The load current and excitation current are directly
linked to each other. 3. As the excitation current increases the load current increases. 4. The
power factor of synchronous generator cosϕ =1 at pure ohmic (resistive) load.
Evaluation
27 | Page Electrical Machines-II LAB (EE-352)
What can you learn from the control characteristics?
The control characteristics tells us what load current flows at how much excitation. This
makes it possible to match the generator operation to the main requirements by excitation.
The rated values for the synchronous machines are drawn in diagram. It can be seen that a
load current of IL=0.76A flows at excitation current of IE=0.95A.
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 11-Dec-2023
Experiment No. 9a
Title
Commissioning of the three-phase induction motor.
Objective
The aim of this experiment is to Operate the three-phase induction motor with squirrel-cage
rotor on no-load.
Apparatus
Three-phase Induction Motor (type 2707)
Brake Unit
Control Unit
Universal Power supply
Connecting wires
Theory
The three-phase induction motor is the motor used most
frequently for industrial drives because of its excellent
reliability, its simple and thus low-cost construction and its
28 | Page Electrical Machines-II LAB (EE-352)
low maintenance costs. The stationary part of the three-phase induction motor is known as the
stator. It consists of housing and a metal casing with grooves in which the three-phase current
winding is embedded the winding is made up of three coils which are arranged offset to each
other at 120°. The rotor also consists of a metal casing with grooves.
The angled arrangement of the rods ensures even running. Short-circuit rings are often
combined with fans for cooling the motor. The drive shaft is located in the center of the rotor.
The starting torque, and value of the starting current can be influenced by different cross
sections of the rotor grooves and appropriate rods. The round rod rotor (a) has a low starting
torque but a higher torque. The drop-shaped rod (b) is preferred for motors up to 1 kW. It has
a medium starting torque and a relatively low starting current. The high rod (c) is used for
motors above 50 kW because it has good starting properties on full load. The double rod (d)
generates a high starting torque and a very favorable ratio between starting and rated current.
In high and double rod rotors an effect occurs which additionally influences the run-up
property of a three-phase induction motor.
Experimental Setup
Procedure
1. First of all, I pushed the experimental machine onto the Brake Unit and coupled it to the
braking machine.
2. Then I fixed the machine by pulling the clamping lever towards the braking machine.
29 | Page Electrical Machines-II LAB (EE-352)
3. Then I set up the experiment according to the given experimental setup.
4. I connected the motor to the 400 V mains in delta circuit
5. I switched on the Control Unit.
6. Then I switched on the Universal Power Supply.
7. Watched the direction-of-rotation display. The motor turned to the right.
8. I switched off the Universal Power Supply first.
9. Noted the speed (no-load speed) and the direction of rotation.
n = 1470rpm
O
Direction of rotation = clock wise.
10. I switched off the Universal Power Supply.
11. I made the operation-mode switch on the Control Unit to MANUAL.
12. I noted the setting of the torque attenuator. Set point switch INT/EXT to “internal
position” and direction-of-rotation switch to previously noted direction of rotation.
13. I started the braking machine by briefly pressing the START/STOP key.
14. I compared the displayed speed with the previously noted one and adjust it, if necessary,
with the set point potentiometer.
15. I switched on the Universal Power Supply. The torque should now be zero. I corrected the
speed with the set point potentiometer if necessary.
16. To finish the experiment, I switched off the Universal Power Supply and then Control
Unit.
Conclusion
By this experiment I concluded that the speed of rotation of a three-phase induction motor at
no load is 1470 rpm. The direction of rotation of motor is clockwise along the brake unit.
30 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 11-Dec-2023
Experiment No. 9b
Title
Operation of three phase induction motor in star and delta circuit.
Objective
The aim of this experiment is to operate the three-phase induction motor first in star and then
in delta circuit and determine the torque characteristics.
Apparatus
• Three-phase Induction Motor (Type 2707)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Connecting Wires
Theory
The three-phase induction motor is the motor used most frequently for industrial drives
because of its excellent reliability, its simple and thus low-cost construction and its low
maintenance costs. The three-phase induction motor is also known as squirrel-cage rotor due
to its construction. The stationary part of the three-phase induction motor is known as the
stator. It consists of housing and a metal casing with grooves in which the three-phase current
31 | Page Electrical Machines-II LAB (EE-352)
winding is embedded. The winding is made up of three coils which are arranged offset to
each other at 120°. The ends of the windings are fed to the terminal board in the junction box.
The rotor also consists of a metal casing with grooves. Aluminum or copper conductor rods
are drawn into these grooves or injected with die cast aluminum and connected by short-
circuits rings at the front sides. The rods and short circuit rings together form a cage and thus
represent the rotor winding. If you imagine the high rod rotor split into single rods one on top
of the other, the inner layers are linked more closely with the leakage flux than the outer ones.
This produces a greater inductive reactance. The outer part of the rod on the other hand is
only weakly linked to the leakage flux which means that the reactance is small.
The current is not distributed evenly over the cross section of the rod but flows mainly in the
outer part of the rods during run-up. The current is displaced by part of the conductor cross
section during the starting phase. This so-called current displacement acts like a bias resistor.
With increasing speed, the current is distributed more and more over the total height of the
rod. The inductive reactance disappears and only the ohmic resistance of the rod remains. The
current-displacement effect increases the starting torque of the motor and reduces the starting
current.
Experimental Setup
a) In Star
b) In Delta
32 | Page Electrical Machines-II LAB (EE-352)
Procedure
1. First of all, I set up the experiment according to the experimental setup.
2. Secondly, I started up the system as already described in previous experiment but first in
star circuit. The motor should turn to the right.
3. I recorded the characteristic points asked for in Table.
4. I switched off the Universal Power Supply first and then the Control Unit.
5. Then I set up the experiment according to the experimental setup.
6. I switched on the Control Unit.
7. I started the braking machine and switched on the Universal Power Supply.
8. I recorded the characteristic points asked for in Table given below.
9. To finish the experiment, I first switched off the Universal Power Supply and then the
Control Unit.
10. I drawed the torque characteristics in the prepared diagram.
Results and Observations
Characteristic Torque in Star Torque in Delta
Speed (rpm)
Point Connection (Nm) Connection (Nm)
No load torque 1480 0 0
Rated Speed 1400 0.8 2.5
1st Sub Value 1200 1.6 5.4
Pull-out Torque 900 2.0 6.3
2nd Sub Value 600 1.8 5.9
3rd Sub Value 300 1.6 5.4
Minimum Speed 30 1.5 5.2
Torque Charecteristics of Induction Motor
9
8
7
6
Torque (Nm)
5
4
3
2
1
0
30 300 600 900 1200 1400 1480
Speed (rpm)
33 | Page Electrical Machines-II LAB (EE-352)
Conclusion
By this experiment it is concluded that,
1. At no load the star and delta the torque is zero.
2. In star circuit if we increase the rpm value then torque first increase and then decrease.
3. In delta connection if we increase rpm then more torque is produced.
Evaluation
How does the torque behave in star and delta circuit?
Higher current means higher torque, and lower current means lower torque. Delta connected
motor will draw more line current, so the torque it produces will also be higher compared to
the Star connection of the same motor. So, the answer to this question is Delta connection.
When is the star/delta-startup circuit used? Describe the function of the circuit.
This is the reduced voltage starting method. Voltage reduction during star-delta starting is
achieved by physically reconfiguring the motor windings as illustrated in the figure below.
During starting the motor windings are connected in star configuration and this reduces the
voltage across each winding. This also reduces the torque by a factor of three. Star/Delta
starters are probably the most common reduced voltage starters. They are used in an attempt
to reduce the start current applied to the motor during start as a means of reducing the
disturbances and interference on the electrical supply.
34 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 18-Dec-2023
Experiment No. 10
Title
Efficiency, current and power factor of a three-phase induction motor.
Objective
The objective of this experiment is to determine the characteristics for efficiency, current and
power factor of a three-phase induction motor with squirrel-cage rotor.
Apparatus
• Three-phase Induction Motor (Type 2707)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• 2 Multimeters
• Power Factor Meter (10A)
Theory
The three-phase induction motor is the motor used most frequently for industrial drives. The
stationary part of the three-phase induction motor is known as the stator. It consists of
housing and a metal casing with grooves in which the three-phase current winding is
embedded. The winding is made up of three coils which are arranged offset to each other at
120°. The ends of the windings are fed to the terminal board in the junction box. The rotor
also consists of a metal casing with grooves. Aluminum or copper conductor rods are drawn
into these grooves or injected with die cast aluminum and connected by short-circuits rings at
the front sides.
The rods and short circuit rings together form a cage and thus represent the rotor winding.
The angled arrangement of the rods ensures even running. Short-circuit rings are often
combined with ventilating fans for cooling the motor. The drive shaft is located in the center
of the rotor. The starting torque, i.e., the run-up properties, and value of the starting current
can be influenced by different cross sections of the rotor grooves and appropriate rods.
Experimental Procedure
1. First of all, I set up the experiment according to the experimental setup given above.
2. I started up the system.
3. The motor should be operated in delta circuit and turn to the right.
4. I recorded the characteristic points asked for in Table. To do this, I read the speed and the
torque from the displays on the Control Unit and calculated the emitted active power Pout
5. I measure the current I, the voltage U and the power factor cosϕ. With these values
calculate the supplied active power Pin and the efficiency η. Use the specified formula for
calculation
35 | Page Electrical Machines-II LAB (EE-352)
6. I switched off the Universal Power Supply first and then the Control Unit.
7. I drew the characteristics for efficiency, current and power factor in the prepared diagram.
Experimental Setup
Results and Observations
Characteristic N M POUT U I PIN
cosɸ η
Points (Rpm) (Nm) (kW) (V) (A) (kW)
No Load Speed 1480 0 0 392.7 0.92 0.5 0.312 0
Rated Speed 1470 0.88 0.135 393.3 6.02 0.5 2.04 6.6
1st Sub value 1400 2.76 0.404 393.8 6.10 0.5 2.08 19.4
Pull-out Value 1370 3.31 0.474 394 6.22 0.5 2.12 22.3
2nd Sub value 1270 4.52 0.60 392.5 6.49 0.5 2.20 27.7
3rd Sub value 510 6.09 0.325 393.4 6.44 0.5 2.50 18.8
36 | Page Electrical Machines-II LAB (EE-352)
Minimum Speed 240 5.44 0.136 392 7.56 0.5 2.566 5.3
Current, Efficiency and Power Factor Charecteristics
30
25
20
15
10
0
0 200 400 600 800 1000 1200 1400 1600
Speed (Rpm)
Current Power Factor Efficieny
Conclusion
In this experiment I have studied the characteristics for efficiency, current and power factor of
a three phase induction motor with squirrel-cage rotor and study using the power meter and
find their values in observation. I concluded that when the load increases, the current also
increases.
Evaluation
What do you learn from the characteristics?
In this experiment when the load is increased on motor, the current is increased. We also draw
a graph for observing the efficiency, current and power factor of a three-phase induction
motor.
37 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 18-Dec-2023
Experiment No. 11
Title
Operations of Dahlander motor at low and high speed.
Objective
The aim of this experiment is to Operate the Dahlander motor first at the low and then at the
high speed. Determine the torque characteristics.
Apparatus
• Dahlander Motor (Type 2709)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Connection wires
Experimental Setup
38 | Page Electrical Machines-II LAB (EE-352)
Theory
A Dahlander motor is a type of multi speed three-phase induction motor, in which the speed
of the motor is varied by altering the number of poles; this is achieved by altering the wiring
connections inside the motor. The motor may have fixed or variable torque depending on the
stator winding. The structure of the Dahlander motor is exactly the same as that of the three-
phase induction motor with squirrel cage rotor except for the stator winding. In the Dahlander
motor each one of the three stator windings is divided into two equal halves and arranged
accordingly in the stator.
This gives numbers of poles with the ratios 4:2, 8:4 or 12:6. The change in the number of
poles or speed by factor 2 is affected by the so-called Dahlander circuit. At the high number
of poles which result in a lower speed, the motor is operated in delta circuit. The halves of the
windings are connected in series and current flows through them in the same direction. The
high speed on the other hand is achieved with the lower number of poles. The motor is then
operated in double-star circuit.
Procedure
1. Firstly, I checked components for working.
2. I set up the experiment as shown in Figure.
3. Then I start up the system at low speed: measuring range 1800rpm. The motor should turn
to the right.
4. I recorded the characteristic points for speed and torque of motor and note them in Table.
Note: Carry out the measurements without delays if possible. If the motor heats up too much,
the measuring results deviate and the motor must cool down.
39 | Page Electrical Machines-II LAB (EE-352)
5. Then I switched off the Universal Power Supply first and then the Control Unit.
6. Then I set up the experiment as shown in figure in double-star circuit for high speed:
measuring range 3600 rpm.
7. I switched on the Control Unit. Start the braking machine and switch on the Universal
Power Supply.
8. I recorded the characteristic points for speed and torque of motor and note them in Table.
9. After the experiment I switched off the Universal Power Supply and then Control Unit.
10. I draw the torque characteristics in the respective graphs.
Characteristics Values at Low Speed
Characteristic Points Speed (rpm) Torque (Nm)
No Load Speed 1490 0
Rated Speed 1390 2.4
1st Sub-value 1200 3.9
Pull-out Torque 1000 4.5
2nd Sub-value 700 4.3
3rd Sub-value 350 3.8
Minimum Speed 70 3.6
Results and Observations
Characteristics Values at High Speed
Characteristic Points Speed (rpm) Torque (Nm)
No Load Speed 2980 0
Rated Speed 2780 1.6
1st Sub-value 2300 2.8
Pull-out Torque 2000 3.1
2nd Sub-value 1200 2.9
3rd Sub-value 500 2.5
Minimum Speed 70 2.4
40 | Page Electrical Machines-II LAB (EE-352)
Torque Charecteristics at Low and High Speed
5
4.5
4
3.5
Torque (Nm)
3
2.5
2
1.5
1
0.5
0
0 500 1000 1500 2000 2500 3000 3500
Speed (Rpm)
Low Speed High Speed
Conclusion
By this experiment I concluded that,
• Dahlander motor operates in delta circuit at low speed.
• Dahlander motor operated in double star circuit at high speed.
• The speed and torque are inversely related to each other.
• Dahlander motor can be operated at two speeds and this can be done by changing
connections.
Evaluation
How does the torque behave in delta or double- star circuit?
Normally, the electrical configuration of windings is varied from a delta connection (Δ) to a
double star connection (YY) configuration in order to change the speed of the motor for
constant torque applications, such as the hoists in cranes.
What constructive measure gives the Dahlander motor two different speeds?
A Dahlander motor achieves different speeds by switching the configuration of the electrical
windings, indirectly adding or removing poles and thus varying the rotor speed. The poles can
be varied at a ratio of 1:2 and thus the speed can be varied at 2:1
41 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 18-Dec-2023
Experiment No. 12
Title
Efficiency, current and power factor of Dahlander motor.
Objective
The aim of this experiment is to determine the characteristics for efficiency, current and
power factor of the Dahlander Motor at the low speed.
Apparatus
• Dahlander Motor (Type 2709)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Connection wires
Theory
The Dahlander motor is a three-phase induction motor with two different speeds which are
always at a fixed ratio of 2:1. The structure of the Dahlander motor is exactly the same as that
of the three-phase induction motor with squirrel cage rotor except for the stator winding. Each
one of the three stator windings is divided into two equal halves and arranged accordingly in
the stator. This gives numbers of poles with the ratios 4:2, 8:4 or 12:6. At the high number of
poles which result in a lower speed, the motor is operated in delta circuit.
The halves of the windings are connected in series and current flows through them in the
same direction. The high speed on the other hand is achieved with the lower number of poles.
The motor is then operated in double-star circuit. The halves of the windings are connected in
parallel and current flows through them in the opposite direction. The power increases by
only about 50 % when switching from delta to double star despite double the speed. The rated
torque is about the same for both speeds.
Procedure
1. Firstly, I checked components for working.
2. I set up the connections as shown in figure.
Note: The motor should be operated in delta circuit (low speed: measuring range 1800 rpm)
and turn to the right. Carry out the measurements without delays if possible. If the motor
heats up too much, the measuring results deviate and the motor must cool down.
3. I recorded the characteristic points asked for in table.
42 | Page Electrical Machines-II LAB (EE-352)
4. To do this, I read the speed n and the torque M from the Display on the Control Unit and I
calculated the emitted active power Pout.
5. I measured the current I, the voltage U and the power factor cosϕ. With these values I
calculated the supplied active power Pin and the efficiency η.
6. I used the specified formula for calculation that are mentioned below.
7. After the experiment, I switched off the Universal Power supply first and then Control
Unit.
8. I draw the characteristics for efficiency, current and power factor in graph.
Experimental Setup
N M POUT U I PIN
Characteristic Points cosɸ η
(Rpm) (Nm) (kW) (V) (A) (kW)
No Load Speed 1490 0 0 380 0.65 0.10 0.04 0
Rated Speed 1380 2.5 0.35 380 0.8 0.72 0.44 0.79
1st Sub value 1200 4 0.49 380 1.4 0.86 0.87 0.56
Pull-out Value 1000 4.6 0.47 380 2 0.86 1.14 0.41
43 | Page Electrical Machines-II LAB (EE-352)
2nd Sub value 710 4.3 0.33 380 2.5 0.83 1.32 0.25
3rd Sub value 360 3.8 0.15 380 2.7 0.83 1.48 0.1
Minimum Speed 60 3.5 0.04 380 2.8 0.80 1.52 0.03
Results and Observations
Current, Efficiency and Power Factor Charecteristics
3
2.5
1.5
0.5
0
0 200 400 600 800 1000 1200 1400 1600
Speed (Rpm)
Current Power Factor Efficieny
Conclusion
By this experiment I concluded that in comparison of current, power factor and efficiency,
• The efficiency of Dahlander motor has highest vales in rated operation.
• The current and power factor increases with increasing load.
• Dahlander motors have the most favourable values in rated operation like the three phase
induction motors with squirrel cage rotor.
• The current, power factor and efficiency of Dahlander motor can be determined at low
speed.
44 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 15-Jan-2024
Experiment No. 13
Title
Commissioning and optimum starting resistance of slip ring rotor.
Objective
The aim of this experiment is to,
• Measure the rotor standstill voltage U2 stand and the rotor current I2.
• Calculate the optimum starting resistance for the slipring rotor with these values (MA=MK,
p=2).
Apparatus
• Slip ring Rotor (Type 2708)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• 2 Multimeters
• Connecting wires
Experimental Setup
45 | Page Electrical Machines-II LAB (EE-352)
Theory
The slip ring rotor also belongs to the group of the three-phase induction motors. Unlike the
three- phase induction motor with squirrel-cage rotor, the rotor winding in the slip-ring rotor
is not short- circuited. Series resistors can be connected to the rotor circuit to improve the
starting properties. The stator of the slip ring rotor has the same structure as that of the three-
phase induction motor with squirrel-cage rotor. The rotor is usually designed as a three-phase
winding in star circuit. The rotor and stator winding have the same number of poles. The rotor
winding is embedded in a sheet- iron casing.
The connections of the rotor are designated K, L and M. Via these the rotor terminals can be
short- circuited or starting resistors circuited in the rotor circuit to improve the starting
properties. The slip ring rotor develops a relatively high starting torque at moderate starting
current. It is therefore particularly suitable for heavy startup on lifting equipment. Slip and cut
speed of the rotary field are reduced when running up from standstill to the loaded state. This
reduces voltage, frequency and inductive resistance of the rotor. Rotor voltage and rotor
frequency change linearly with the slip.
Procedure
1. Firstly, I checked components for working.
2. Then I pushed the experimental machine onto the Brake Unit and couple it to the braking
machine.
3. I fixed the experimental machine by pulling the clamping lever towards the braking
machine.
4. I Set up the experiment as shown in figure.
5. I connected the motor to the 400 V mains in star circuit.
6. I switched on the Universal Power Supply.
7. I measured the rotor standstill voltage U2 stand and note the value.
46 | Page Electrical Machines-II LAB (EE-352)
8. Then I switched off the Universal Power Supply.
9. I converted the circuit as shown in figure and switched on the Control Unit.
10. I noted the speed (no-load speed) and the direction of rotation.
Note: Switch on the Universal Power Supply: speed, torque and direction of rotation are
displayed. Watch the direction-of-rotation display. The motor should turn to the right.
Exchange the mains leads if necessary. Switch off the Universal Power Supply first.
11. I switched off the Universal Power Supply.
12. I calculated the rotor voltage U2 and rotor resistance Ra.
Results and Observations
By performing this experiment, I got following observations,
U2stand = 94V IN=1.14A I2 = 2.8A nk = 1070rpm
By measured values, I calculated required values,
Speed of Rotary Field = n0 = f/p *60s = (50 * 60)/2 = 1500rpm
Pull-Out Slip = sK = (n0 − nk)/n0 = 1500-1070/1500 = 0.286
Rotor Voltage = U2 = sk * U2stand = 0.286 * 94 = 26.94V
Rotor Resistance for 1st Phase = R2 = 1/2 *U2/I2 = 1/2 * 26.94/2.8 = 4.81ꭥ
Optimum Starting Resistance = Ra max = R2* (1/sK - 1) = 4.8*(1/0.28 - 1) = 12ꭥ
Conclusion
By performing this experiment, I concluded that,
• The starting resistance of a slip ring motor is 12ohms.
• The slip ring induction motors have high starting torque with low starting current whereas
squirrel cage motors have low starting torque and high starting current.
Evaluation
What do you learn from the characteristics?
In this experiment at stand still situation the slip of the motor is 1 as the motor starts running,
slip of motor decreased and continue to decrease until the motor gains its constant speed.
47 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 15-Jan-2024
Experiment No. 14a
Title
Commissioning of the capacitor motor.
Objective
The aim of this experiment is to operate the motor with phase-shifting capacitor on no-load.
Apparatus
• Capacitor Motor (Type 2715)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Connecting Wires
Experimental Setup
Theory
48 | Page Electrical Machines-II LAB (EE-352)
The capacitor motor is constructed according to the same principle as the three-phase
induction motor with squirrel cage rotor and is used everywhere where there is no three-phase
mains and electric drives with a power up to 1.5 kW are required. It is also designated as
single- phase AC motor with capacitor or induction motor. Examples of this are devices
which require single-phase AC voltage such as washing machines, dishwashers, coolers and
heaters, electric tools, office machines etc.
Very important for a good operating behavior is that the powers of the main winding and
auxiliary winding are approximately equal. If this is not achieved, two opposite rotary fields
are produced and thus a counter-torque. As a result, the effective torque and the currents
increase. The efficiency deteriorates considerably as a result and the load capacity is reduced.
Other disadvantages are a poorer power factor, greater heating and thus greater losses in the
rotor. In single-phase AC motors with phase-shifting capacitor the starting torque is only
about 50 % of the rated torque. However, the starting torque in motors which have a phase-
shifting capacitor and a starting capacitor is much better.
Procedure
1. Firstly, I checked components for working.
2. I pushed the experimental machine onto the Brake Unit and couple it to the braking
machine.
3. I fixed the experimental machine by pulling the clamping lever towards braking
machine.
4. I Set up the experiment as shown in figure.
5. I connected the motor to the 230V mains.
6. I switched on the Universal Power Supply.
7. After that, I noted the speed and direction of rotation of motor.
8. Then I switched off the Universal Power Supply and the control unit.
Results and Observations
I observed,
no = 1510rpm
Direction of rotation = Right
Conclusion
By this experiment I learned,
• The commissioning of a capacitor motor.
• The capacitor motor has two capacitors CA and CB.
• CA has greater value than CB.
• The direction of rotation is in right direction.
• The speed at no load is 1510rpm.
49 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 15-Jan-2024
Experiment No. 14b
Title
Operation of the motor with phase-shifting capacitor and starting capacitor.
Objective
The aim of this experiment is to,
• To operate the single-phase AC motor once with the phase-shifting capacitor only and once
with the phase-shifting and starting capacitor.
• Determine the torque characteristics.
Apparatus
• Capacitor Motor (Type 2715)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Connecting Wires
Theory
The capacitor motor is constructed according to the same principle as the three-phase
induction motor with squirrel cage rotor and is used everywhere where there is no three-phase
mains and electric drives with a power up to 1.5 kW are required. It is also designated as
single-phase AC motor with capacitor or induction motor. Examples of this are devices which
require single-phase AC voltage such as washing machines, dishwashers, coolers and heaters,
electric tools, office machines etc.
Very important for a good operating behavior is that the powers of the main winding and
auxiliary winding are approximately equal. If this is not achieved, two opposite rotary fields
are produced and thus a counter-torque. As a result, the effective torque and the currents
increase. The efficiency deteriorates considerably as a result and the load capacity is reduced.
In single-phase AC motors with phase-shifting capacitor the starting torque is only about 50
% of the rated torque.
Procedure
50 | Page Electrical Machines-II LAB (EE-352)
1. Firstly, I checked the components for working.
2. I set the apparatus as shown in figure.
3. I start up the system with phase-shifting capacitor. The motor turn to the right.
4. I recorded the characteristic points for speed and torque of motor and note them in Table.
5. I switched off the Universal Power Supply first and then the Control Unit.
6. Then I set up the experiment as shown in with phase-shifting and starting capacitor.
7. I switched on the Control Unit. Start the braking machine and switch on the Universal
Power Supply.
8. I recorded the characteristic points for speed and torque of motor and note them in Table.
9. After the experiment first switch off the Universal Power Supply and then the Control
Unit.
10. Finally, I drawn the torque characteristics in the Graph.
Experimental Setup
Operation with phase-shifting capacitor
Operation with phase-shifting capacitor and starting capacitor
51 | Page Electrical Machines-II LAB (EE-352)
Results and Observations
Characteristic Speed Torque using Phase Torque using Phase shifting
Point (rpm) shifting Capacitor Capacitor and Starting Capacitor
No load torque 1560 0.0 0.0
Rated Speed 1425 2.0 2.0
1st Sub Value 1300 2.8 2.8
Pull-out Torque 1150 2.9 3.0
2nd Sub Value 1100 3.0 4.4
3rd Sub Value 800 2.0 3.4
Minimum Speed 80 0.7 2.0
Torque Charecteristics of Capacitor Motor
8
7
6
Torque (Nm)
5
4
3
2
1
0
80 800 1100 1150 1300 1425 1560
Speed (rpm)
With Phaseshifting Capacitor With Phase shifting Capacitor and Starting Capacitor
Conclusion
By this experiment I concluded that, the speed and torque in a capacitor motor are inversely
related to each other. As the torque increases the speed decreases in both cases. When the
torque reaches pull out value the torque starting decreases.
Evaluation
What is the effect of the auxiliary-phase starting relay in the capacitor motor?
The auxiliary phase starting relay is set as the rule so that it switches off at 70-80% of the rated
speed. The current of the motor main winding flows through the relay coil. To avoid a power loss
of the motor the coil has few windings with large wire cross section. The rely remains pulled up
until the motor has reached its rated speed approximately. At this time the starting current is
reduced to the value of the operating current and the relay drops out. The auxiliary winding is
switched off by the relay contact.
52 | Page Electrical Machines-II LAB (EE-352)
Name Muhammad Khuram Marks
Roll No 21013122-008
Section Section-A
Date of Experiment 15-Jan-2024
Experiment No. 16
Title
Efficiency, current and power factor of the capacitor motor.
Objective
The aim of this experiment is to determine the characteristics for efficiency, current and
power factor of the capacitor motor using the phase-shifting capacitor only.
Apparatus
• Capacitor Motor (Type 2715)
• Brake Unit (Type 2719)
• Control Unit (Type 2730)
• Universal Power Supply (Type 2740)
• Electronic Phase-Angle Meter (Type 8706)
• 2 multimeters
Experimental Setup
53 | Page Electrical Machines-II LAB (EE-352)
Theory
The capacitor motor is constructed according to the same principle as the three-phase
induction motor with squirrel cage rotor and is used everywhere where there is no three-phase
mains and electric drives with a power up to 1.5 kW are required. It is also designated as
single-phase AC motor with capacitor or induction motor. Examples of this are devices which
require single-phase AC voltage such as washing machines, dishwashers, coolers and heaters,
electric tools, office machines etc.
Very important for a good operating behavior is that the powers of the main winding and
auxiliary winding are approximately equal. If this is not achieved, two opposite rotary fields
are produced and thus a counter-torque. As a result, the effective torque and the currents
increase. The efficiency deteriorates considerably as a result and the load capacity is reduced.
In single-phase AC motors with phase-shifting capacitor the starting torque is only about 50
% of the rated torque.
Procedure
1. Set up the experiment.
2. Start up the system only with phase-shifting capacitor. The motor should turn to the right.
3. Record the characteristic points asked for in Table. To do this, read the speed and the
torque from the displays on the Control Unit and calculate the emitted active power Pout.
Measure the current I, the voltage U and the power factor cosϕ. With these values
calculate the supplied active power Pin and the efficiency ɳ.
4. After recording the characteristic points switch off the Universal Power Supply first and
then the Control Unit.
54 | Page Electrical Machines-II LAB (EE-352)
5. Draw the characteristics for efficiency, current and power factor in the prepared diagram.
6. Determine the scale yourself.
Results and Observations
Characteristic N M POUT U I PIN
cosɸ η
Points (Rpm) (Nm) (kW) (V) (A) (kW)
No Load Speed 1490 0 0 380 0.65 0.10 0.04 0
Rated Speed 1380 2.5 0.35 380 0.8 0.72 0.44 0.79
1st Sub value 1200 4 0.49 380 1.4 0.86 0.87 0.56
Pull-out Value 1000 4.6 0.47 380 2 0.86 1.14 0.41
2nd Sub value 710 4.3 0.33 380 2.5 0.83 1.32 0.25
3rd Sub value 360 3.8 0.15 380 2.7 0.83 1.48 0.1
Minimum Speed 60 3.5 0.04 380 2.8 0.80 1.52 0.03
Current, Efficiency and Power Factor Charecteristics
30
25
20
15
10
0
0 200 400 600 800 1000 1200 1400 1600
Speed (Rpm)
Current Power Factor Efficieny
Conclusion
By this experiment I concluded that in comparison of current, power factor and efficiency,
• The efficiency of Capacitor motor has highest vales in rated operation.
• The current and power factor increases with increasing load.
55 | Page Electrical Machines-II LAB (EE-352)
• Capacitor motors have the most favourable values in rated operation like the three phase
induction motors with squirrel cage rotor.
• The current, power factor and efficiency of Capacitor motor can be determined using phase
shifting capacitor.
56 | Page Electrical Machines-II LAB (EE-352)
You might also like
- Lab 2 PDFDocument7 pagesLab 2 PDFRoss LevineNo ratings yet
- ELP203 Manual Cycle1 PDFDocument25 pagesELP203 Manual Cycle1 PDFAnurag ChaudharyNo ratings yet
- Lab 2 Power GenerationDocument7 pagesLab 2 Power GenerationKhawla AlameriNo ratings yet
- 2 Machine LabDocument4 pages2 Machine LabManoj GuptaNo ratings yet
- Electrical Machines Lab Manual (DC Machines and Transformer)Document34 pagesElectrical Machines Lab Manual (DC Machines and Transformer)AmulyaNo ratings yet
- Experiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Document10 pagesExperiment-4: V S Akshit 19BEE0435 L39+L40 1 September 2020Akshit VSNo ratings yet
- Machine Lab IIIDocument9 pagesMachine Lab IIIMengistu TarkoNo ratings yet
- Ee07lab Experiment AutotransformerDocument5 pagesEe07lab Experiment AutotransformerPido, Patricia LaineNo ratings yet
- 10eel58 Transformers and Induction Machines LaboratoryDocument32 pages10eel58 Transformers and Induction Machines Laboratorysvinod s100% (2)
- Sr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorDocument40 pagesSr. No. Name of Experiment: Load Test On 3 Phase Squirrel Cage Induction MotorSagar G ReddyNo ratings yet
- Tanmay Agrawal: Pre-Lab QuestionsDocument9 pagesTanmay Agrawal: Pre-Lab QuestionsTanmay Agrawal (RA2011047010093)No ratings yet
- Em Lab-II ManualDocument45 pagesEm Lab-II Manualrkadiraj701160% (5)
- EEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringDocument10 pagesEEE2003 - Electromechanical Energy Conversion Lab: School of Electrical EngineeringAkshit VSNo ratings yet
- Experiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Document6 pagesExperiment - No.10 Load Test On DC Shunt Motor: DATE:10/12/2021Baba YagaNo ratings yet
- Leybold Práctica3 TrafoMonofásicoDocument8 pagesLeybold Práctica3 TrafoMonofásicoNOGRACIASNo ratings yet
- Yog Patil - Expt. No. 3Document8 pagesYog Patil - Expt. No. 3Yog PatilNo ratings yet
- Eguieron - Carlo - Experiment No.7 - Ee07labDocument6 pagesEguieron - Carlo - Experiment No.7 - Ee07labCarlo EguieronNo ratings yet
- Be8261 Beee LabDocument44 pagesBe8261 Beee LabBharath PonNo ratings yet
- Eep 203 Electromechanics LaboratoryDocument65 pagesEep 203 Electromechanics Laboratorysourabh_rohillaNo ratings yet
- Electromag - Transformers - Report FinalDocument7 pagesElectromag - Transformers - Report FinalFaustin MailuNo ratings yet
- Ele 291 Lab Report Exp7Document7 pagesEle 291 Lab Report Exp7Hamzah أسَدُ أللَّهNo ratings yet
- Machine LabDocument7 pagesMachine LabNurjahan-Ara StudentNo ratings yet
- Exp MachinesDocument8 pagesExp MachinesAngelina JolieNo ratings yet
- BE3271 Basic Electrical & Electronis Lab Manual Reg 2021Document57 pagesBE3271 Basic Electrical & Electronis Lab Manual Reg 2021Karthiga KSNo ratings yet
- Experiment No Experiment Name ObjectiveDocument12 pagesExperiment No Experiment Name ObjectiveZareen Rashid ChoudhuryNo ratings yet
- Experiment 6 Aim:: Apparatus RequiredDocument3 pagesExperiment 6 Aim:: Apparatus Requiredmeghasingh_09No ratings yet
- Open Circuit & Short Open Circuit & Short Circuit Test Single Phase Transformer Tests of RmerDocument14 pagesOpen Circuit & Short Open Circuit & Short Circuit Test Single Phase Transformer Tests of Rmersameerpatel15770No ratings yet
- Exp5. VTDocument10 pagesExp5. VTMohammed Abu Al HaijaNo ratings yet
- Martel Glece Jean Lab Physics2 Act 5 Ohms LawDocument22 pagesMartel Glece Jean Lab Physics2 Act 5 Ohms LawGlece Jean MartelNo ratings yet
- Lab 1Document32 pagesLab 1Adhithyan KzhlmNo ratings yet
- Ele Lab ManualDocument10 pagesEle Lab ManualMothxNinjaNo ratings yet
- PT Lab 09Document9 pagesPT Lab 09Arslan Bin ShabeerNo ratings yet
- Load Test On Single Phase Transformer: Shubham Sharma: RA2111003010611: 28.10.21Document11 pagesLoad Test On Single Phase Transformer: Shubham Sharma: RA2111003010611: 28.10.21shubhamNo ratings yet
- Electric Machines LaboratoryDocument44 pagesElectric Machines Laboratory11mustafa.mNo ratings yet
- Hermogenes Act 1Document4 pagesHermogenes Act 1JHANELLE MAE PALAFOXNo ratings yet
- Winsem2023-24 Beee215p Lo Ch2023240502403 Reference Material I Lab Manual Beee215pDocument25 pagesWinsem2023-24 Beee215p Lo Ch2023240502403 Reference Material I Lab Manual Beee215pshrinidhi.rm2022No ratings yet
- Experiment 3 XFR RegulationDocument9 pagesExperiment 3 XFR RegulationMath Is AwesomeNo ratings yet
- Exp02v H1Document6 pagesExp02v H1jaswinder singhNo ratings yet
- Eep Practical File: IndexDocument17 pagesEep Practical File: IndexAkash GandharNo ratings yet
- DeptDocument8 pagesDeptRaskshannaNo ratings yet
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringDocument42 pagesBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooNo ratings yet
- ACFrOgCqMBIt9H4SGXoNbXT-GN-A9BhEOWL3VO9AanTPs6DGeV10cYwyieLlBwEA3k36t FjyG68rM9GJHU9s-V3hVT2PJDvCl9ggaCLeBc zAJaHKcNH9hdIuVnO6t0DjQJ3KBhluInkic 29MjDocument18 pagesACFrOgCqMBIt9H4SGXoNbXT-GN-A9BhEOWL3VO9AanTPs6DGeV10cYwyieLlBwEA3k36t FjyG68rM9GJHU9s-V3hVT2PJDvCl9ggaCLeBc zAJaHKcNH9hdIuVnO6t0DjQJ3KBhluInkic 29MjEzekiel IyamuNo ratings yet
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document31 pagesParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanNo ratings yet
- Addis Ababa Science and Technology University Collage of Electrical and Mechanical Engineering Department of Electromechanical EngineeringDocument6 pagesAddis Ababa Science and Technology University Collage of Electrical and Mechanical Engineering Department of Electromechanical EngineeringHanan ShayiboNo ratings yet
- BeeeDocument66 pagesBeeejaydeep gudetiNo ratings yet
- Polarity, Voltage Ratio and Load TestDocument7 pagesPolarity, Voltage Ratio and Load TestAbhipsha PatroNo ratings yet
- ECCE4356 Lab Manual 2Document29 pagesECCE4356 Lab Manual 2Siva Bala KrishnanNo ratings yet
- Machine Lab Manuals Final Modified On 12-2-2019Document67 pagesMachine Lab Manuals Final Modified On 12-2-2019Danyal NasirNo ratings yet
- ELE 2403 Lab 4 Zener DiodeDocument9 pagesELE 2403 Lab 4 Zener Diodevishvajeettiwari96No ratings yet
- ELEPRA3 Assessment 2Document18 pagesELEPRA3 Assessment 2SBUSISONo ratings yet
- Cycle 1 Exp 2Document9 pagesCycle 1 Exp 2Agnivesh SinghNo ratings yet
- LAB 3Document6 pagesLAB 3Nelvin TiongNo ratings yet
- Plugin-LM ECE EMEC ManualDocument0 pagesPlugin-LM ECE EMEC Manualnainesh goteNo ratings yet
- The Islamic University of Gaza Electrical Engineering DepartmentDocument8 pagesThe Islamic University of Gaza Electrical Engineering DepartmentsanabelNo ratings yet
- Laboratory Report #04 Testing TransformersDocument5 pagesLaboratory Report #04 Testing TransformersCristian Camilo Díaz Piñeros0% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Ch01 Microcontroller History and FeaturesDocument20 pagesCh01 Microcontroller History and Featureschawara779No ratings yet
- chap 10Document37 pageschap 10chawara779No ratings yet
- Lecture 15Document9 pagesLecture 15chawara779No ratings yet
- 457 Nodal Analysis 2015Document17 pages457 Nodal Analysis 2015chawara779No ratings yet
- Step 7 A07 - SaveDocument16 pagesStep 7 A07 - SavesifuszNo ratings yet
- Tutorial Fuzzy Stepper Motor ControlDocument16 pagesTutorial Fuzzy Stepper Motor Controlz4ky_ebatNo ratings yet
- BLDCDocument6 pagesBLDCsandeep_036No ratings yet
- Lecture 5: Memory Addressing: KT6144 / KT6213Document57 pagesLecture 5: Memory Addressing: KT6144 / KT6213Saiful RizamNo ratings yet
- BEE-Module-2 Series and Parallel NetworksDocument36 pagesBEE-Module-2 Series and Parallel NetworksMARK JOHN AL RODAVIANo ratings yet
- P50S601 Service ManualDocument49 pagesP50S601 Service ManualJohn Roberts100% (1)
- SRW2224G4 K9Document1 pageSRW2224G4 K9koushik42000No ratings yet
- Versatile Performance: Color LCD MonitorDocument2 pagesVersatile Performance: Color LCD MonitorHugh RaltonNo ratings yet
- Airborne DF System For SAR - CSARDocument28 pagesAirborne DF System For SAR - CSARdraganestNo ratings yet
- Tman - 0426 - 01 - 01 DT DTR V4Document238 pagesTman - 0426 - 01 - 01 DT DTR V4iskandarzuluNo ratings yet
- Fuzzy Logic Based Farm Automation Using Arduino and Labview With X-Bee Based Control SystemDocument5 pagesFuzzy Logic Based Farm Automation Using Arduino and Labview With X-Bee Based Control SystemUnitomo BetterNo ratings yet
- Ultra Wide Band (UWB) TechnologyDocument12 pagesUltra Wide Band (UWB) TechnologyKunal KishoreNo ratings yet
- Mil STD 464aDocument121 pagesMil STD 464amuriel_reperant5867No ratings yet
- ML200R 24-06-14Document24 pagesML200R 24-06-14Nikhil KpNo ratings yet
- Series: Mechanical Style Pressure SwitchDocument15 pagesSeries: Mechanical Style Pressure SwitchPhúc Phan TiếnNo ratings yet
- Power Flow Analysis Using ETAP SoftwareDocument68 pagesPower Flow Analysis Using ETAP SoftwareRashedul Islam100% (1)
- CG LT Motor Catalogue-1Document25 pagesCG LT Motor Catalogue-1lightsonsNo ratings yet
- Grid Connected Inverter Design GuideDocument52 pagesGrid Connected Inverter Design GuideRakesh SandarativjuNo ratings yet
- Zesco Solar Gyser ProjectDocument23 pagesZesco Solar Gyser ProjectGulbanu KarimovaNo ratings yet
- Describe What Your Final Project Is?sDocument4 pagesDescribe What Your Final Project Is?slalalalisa 03No ratings yet
- LG L1511S Chassis CL32Document28 pagesLG L1511S Chassis CL32Jose AlbertoNo ratings yet
- RFS 220-2DDocument2 pagesRFS 220-2DP HandokoNo ratings yet
- Capstone - Design, Installations and Testing of Electrical Systems in BuildingDocument10 pagesCapstone - Design, Installations and Testing of Electrical Systems in BuildingHaziq10101No ratings yet
- Actox 40W Ku-Band BUC/SSPA Data Sheet ABDN40KXDocument2 pagesActox 40W Ku-Band BUC/SSPA Data Sheet ABDN40KXarzeszutNo ratings yet
- MacGregor Welding Systems Operation Manual - m3 - DC2003PDocument78 pagesMacGregor Welding Systems Operation Manual - m3 - DC2003PBernie Wire100% (2)
- 1st Order CircuitsDocument14 pages1st Order Circuitsmeghraj01No ratings yet
- Technical Offer-SWE-298-23-V1Document1 pageTechnical Offer-SWE-298-23-V1Karim RahmaniNo ratings yet
- Caterpillar CCM ForDieselEngines PDFDocument87 pagesCaterpillar CCM ForDieselEngines PDFAnonymous M0OEZEKoGi100% (1)
- Ra Ec 05032 Analog CommunicationsDocument1 pageRa Ec 05032 Analog CommunicationssivabharathamurthyNo ratings yet
- Emc 813 Task1ZduToitDocument4 pagesEmc 813 Task1ZduToitZainDinoduToitNo ratings yet