Download as pdf or txt
You might also like
- Magic Candle Retest Paid Indicator FreeDocument4 pagesMagic Candle Retest Paid Indicator Freevikas100% (2)
- Ecdl Manual Module 1Document71 pagesEcdl Manual Module 1Jarvis SimpsonNo ratings yet
- History of Microsoft OfficeDocument29 pagesHistory of Microsoft OfficeMNM100% (1)
- KleinMurray2007ISMAR PDFDocument10 pagesKleinMurray2007ISMAR PDFjoaofaroNo ratings yet
- Comparison of Optimization Techniques For 3D Graph-Based SlamDocument6 pagesComparison of Optimization Techniques For 3D Graph-Based Slambo xuNo ratings yet
- Real-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenDocument10 pagesReal-Time Radar SLAM: 11. Workshop Fahrerassistenzsysteme Und Automatisiertes FahrenAsmaa HassanNo ratings yet
- Uncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsDocument14 pagesUncertainty Analysis For Optimum Plane Extraction From Noisy 3D Range-Sensor Point-CloudsIan MedeirosNo ratings yet
- LOAM: Lidar Odometry and Mapping in Real-Time: Ji Zhang and Sanjiv SinghDocument9 pagesLOAM: Lidar Odometry and Mapping in Real-Time: Ji Zhang and Sanjiv SinghMetehan DoğanNo ratings yet
- Lego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainDocument8 pagesLego-Loam: Lightweight and Ground-Optimized Lidar Odometry and Mapping On Variable TerrainMetehan DoğanNo ratings yet
- ICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixDocument7 pagesICP-based Pose-Graph SLAM: Ellon Mendes, Pierrick Koch, Simon LacroixmhahmadNo ratings yet
- Mobile Robot SLAM Methods Improved For Adapting To Search and Rescue EnvironmentsDocument6 pagesMobile Robot SLAM Methods Improved For Adapting To Search and Rescue EnvironmentsexampleNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNo ratings yet
- ICP-Based Pose-Graph SLAM: Ellon Mendes and Pierrick Koch and Simon LacroixDocument6 pagesICP-Based Pose-Graph SLAM: Ellon Mendes and Pierrick Koch and Simon LacroixMetehan DoğanNo ratings yet
- 0135 PDFDocument8 pages0135 PDFpepepe123jkghjkhNo ratings yet
- Generalized Patch MatchDocument14 pagesGeneralized Patch MatchJB HoarauNo ratings yet
- Appearance-Only SLAM at Large Scale With FAB-MAP 2.0Document22 pagesAppearance-Only SLAM at Large Scale With FAB-MAP 2.0bahiNo ratings yet
- 3d Iccv17Document10 pages3d Iccv17Huy Nguyễn BảoNo ratings yet
- Sparse Online Low-Rank Projection and Outlier Rejection (SOLO) For 3-D Rigid-Body Motion RegistrationDocument8 pagesSparse Online Low-Rank Projection and Outlier Rejection (SOLO) For 3-D Rigid-Body Motion RegistrationLuis SentisNo ratings yet
- Efficient Sparse Pose Adjustment For 2D Mapping - Konolige10irosDocument8 pagesEfficient Sparse Pose Adjustment For 2D Mapping - Konolige10irosYu Han LiNo ratings yet
- Pang 2019Document6 pagesPang 2019RAGHU PILLINo ratings yet
- Yang SANet Scene Agnostic Network For Camera Localization ICCV 2019 PaperDocument10 pagesYang SANet Scene Agnostic Network For Camera Localization ICCV 2019 Papervishalk172No ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNo ratings yet
- Fast 3D Mapping by Matching Planes Extracted From Range Sensor Point-CloudsDocument6 pagesFast 3D Mapping by Matching Planes Extracted From Range Sensor Point-CloudsNadisson L PavanNo ratings yet
- Implementation of SLAM On Mobile Robots and Stitching of The Generated MapsDocument13 pagesImplementation of SLAM On Mobile Robots and Stitching of The Generated MapsTay LinNo ratings yet
- Eltoukhy Salama ReportDocument22 pagesEltoukhy Salama ReportSaeideh OraeiNo ratings yet
- A Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesDocument4 pagesA Fuzzy Graph-Based Segmentation For Marine and Maritime Applications in SAR ImagesMiqueias AmorimNo ratings yet
- Active Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsDocument8 pagesActive Monocular LocalizationTowards Autonomous Monocular Exploration For Multirotor MAVsxiaosunliangNo ratings yet
- A Flexible and Scalable SLAM System With Full 3D Motion EstimationDocument6 pagesA Flexible and Scalable SLAM System With Full 3D Motion EstimationTiga LeungNo ratings yet
- Exploiting Temporal Coherence in Ray Casted WalkthroughsDocument9 pagesExploiting Temporal Coherence in Ray Casted WalkthroughsHeji ZulkunzNo ratings yet
- Get Out of My Lab: Large-Scale, Real-Time Visual-Inertial LocalizationDocument10 pagesGet Out of My Lab: Large-Scale, Real-Time Visual-Inertial LocalizationSergio CabreraNo ratings yet
- Reconstructing Street-Scenes in Real-Time From A Driving CarDocument8 pagesReconstructing Street-Scenes in Real-Time From A Driving CarSan Lug OmaNo ratings yet
- 3d Mapping Iser 10 FinalDocument15 pages3d Mapping Iser 10 FinalHieu TranNo ratings yet
- RSS 2014Document10 pagesRSS 2014FALAK FATIMANo ratings yet
- A Machine Learning Approach To GeoreferencingDocument5 pagesA Machine Learning Approach To GeoreferencingPunyashlok MahapatraNo ratings yet
- Global Localization Using Local Pole PatternsDocument10 pagesGlobal Localization Using Local Pole Patternsvictor calan ucNo ratings yet
- Overlapnet: Loop Closing For Lidar-Based SlamDocument10 pagesOverlapnet: Loop Closing For Lidar-Based SlamIgnacio VizzoNo ratings yet
- Submap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataDocument13 pagesSubmap-Based Bundle Adjustment For 3D Reconstruction From RGB-D DataZQQNo ratings yet
- Machine Learning For High-Speed Corner Detection: July 2006Document15 pagesMachine Learning For High-Speed Corner Detection: July 2006Mamatgrab GamingNo ratings yet
- CoslamDocument21 pagesCoslamkrmaheshkumaar30No ratings yet
- 3D Mapping and Navigation For Autonomous Quadrotor AircraftDocument6 pages3D Mapping and Navigation For Autonomous Quadrotor AircraftErvin DavilaNo ratings yet
- A Heightfield On An Isometric GridDocument13 pagesA Heightfield On An Isometric Gridxarek-zaudorNo ratings yet
- Adaptive Relative Bundle AdjustmentDocument8 pagesAdaptive Relative Bundle AdjustmentIan MedeirosNo ratings yet
- RANSAC Vs ICP PDFDocument15 pagesRANSAC Vs ICP PDFSaransh Vora100% (1)
- Realtime Scanmatching and Localization Using A Spinning Laser Rangefinder Tudor AchimDocument5 pagesRealtime Scanmatching and Localization Using A Spinning Laser Rangefinder Tudor AchimTudor AchimNo ratings yet
- Model Globally, Match Locally: Efficient and Robust 3D Object RecognitionDocument8 pagesModel Globally, Match Locally: Efficient and Robust 3D Object RecognitionBích Lâm NgọcNo ratings yet
- Fast Range Image Segmentation and SmoothDocument6 pagesFast Range Image Segmentation and Smoothstarvz95No ratings yet
- Paperiros SRT HDocument6 pagesPaperiros SRT HKiki Riki MikiNo ratings yet
- Multi-Image Matching Using Multi-Scale Oriented Patches: Matthew Brown Richard Szeliski Simon WinderDocument8 pagesMulti-Image Matching Using Multi-Scale Oriented Patches: Matthew Brown Richard Szeliski Simon WinderFanny GaNo ratings yet
- Exact Distance Computation For DeformablDocument8 pagesExact Distance Computation For DeformablSachin GNo ratings yet
- Experimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile RoboticsDocument8 pagesExperimental Evaluation and Comparison of LiDAR SLAM Algorithms For Mobile Roboticscafiro7900No ratings yet
- Research On Cartographer Algorithm Based On Low CoDocument4 pagesResearch On Cartographer Algorithm Based On Low Codelaware4parkerNo ratings yet
- Suma++: Efficient Lidar-Based Semantic SlamDocument8 pagesSuma++: Efficient Lidar-Based Semantic SlamIgnacio VizzoNo ratings yet
- Relative Bundle AdjustmentDocument26 pagesRelative Bundle Adjustmentbob wuNo ratings yet
- DSDPKDocument8 pagesDSDPK363331272No ratings yet
- Sensors 18 01294 PDFDocument19 pagesSensors 18 01294 PDFVICTOR PEREZNo ratings yet
- Improving Grid-Based SLAM With Rao-Blackwellized Particle Filters by Adaptive Proposals and Selective ResamplingDocument6 pagesImproving Grid-Based SLAM With Rao-Blackwellized Particle Filters by Adaptive Proposals and Selective Resamplingdogukan duranNo ratings yet
- A Single LiDAR-Based Feature Fusion Indoor Localiz PDFDocument19 pagesA Single LiDAR-Based Feature Fusion Indoor Localiz PDFVICTOR PEREZNo ratings yet
- Use Nko 17 Re PlanningDocument8 pagesUse Nko 17 Re Planningageoir goeNo ratings yet
- Fast and Subpixel Precise Blob Detection and AttributionDocument4 pagesFast and Subpixel Precise Blob Detection and AttributionFelix FergosenNo ratings yet
- Automatic Generation of 3D Polygon Maps For Mobile RobotsDocument5 pagesAutomatic Generation of 3D Polygon Maps For Mobile Robotsjesus_larrazabal_salasNo ratings yet
- Large-Scale and Drift-Free Surface Reconstruction Using Online Subvolume RegistrationDocument9 pagesLarge-Scale and Drift-Free Surface Reconstruction Using Online Subvolume RegistrationdewddudeNo ratings yet
- 3 Fundamentals For Computer Vision & Deep LearningDocument56 pages3 Fundamentals For Computer Vision & Deep LearningmadhuNo ratings yet
- Scanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesFrom EverandScanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesNo ratings yet
- MCQ Bank For Computer FundamentalsDocument5 pagesMCQ Bank For Computer FundamentalsEgeru JosephNo ratings yet
- GWD11643-13 Examination Questions For ECDIS Type Specific TrainingDocument9 pagesGWD11643-13 Examination Questions For ECDIS Type Specific TrainingSmh ZtsNo ratings yet
- SAD Module+1 Introduction+to+Systems+Analysis+and+DesignDocument22 pagesSAD Module+1 Introduction+to+Systems+Analysis+and+DesignDumm DummNo ratings yet
- DWF13 Designing QorIQ Software SanJoseDocument73 pagesDWF13 Designing QorIQ Software SanJosenavid mirmotahharyNo ratings yet
- Bab 1 Introductionl of OsDocument5 pagesBab 1 Introductionl of OsFarah HussinNo ratings yet
- Oracle Real Application Clusters 19c: Best Practices and Secret InternalsDocument47 pagesOracle Real Application Clusters 19c: Best Practices and Secret Internalselcaso34No ratings yet
- CERINTE Wedo - 2.0Document5 pagesCERINTE Wedo - 2.0Ligia333No ratings yet
- AutoCAD 2012 For Dummies Cheat Sheet - For DummiesDocument5 pagesAutoCAD 2012 For Dummies Cheat Sheet - For DummiesEdgard Coelho100% (1)
- AutoCAD Assignment OneDocument4 pagesAutoCAD Assignment Onesheila shonhiwaNo ratings yet
- Log Cat 1658056895937Document50 pagesLog Cat 1658056895937Aldi AlbarrNo ratings yet
- Dinamic Graphics 3 PDFDocument97 pagesDinamic Graphics 3 PDFFlorinNo ratings yet
- User's Guide Rev.ADocument28 pagesUser's Guide Rev.AUlfa DwiyantiNo ratings yet
- 7 Best Remote Administration Tool For PC - Your HackerDocument6 pages7 Best Remote Administration Tool For PC - Your Hackerashuuuuuuuuuuuuuuu100% (1)
- DJI L1 Operation Guidebook V1.1Document47 pagesDJI L1 Operation Guidebook V1.1Sebastian ChaconNo ratings yet
- L2a - Advanced Word Processing SkillsDocument44 pagesL2a - Advanced Word Processing SkillsChad de la PeñaNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityOm Patel PatelNo ratings yet
- Release Notes v6.3.2Document18 pagesRelease Notes v6.3.2Hasso HeinrichNo ratings yet
- SecureDataTransfer Over The Internet Using Image CryptoSteganographyDocument20 pagesSecureDataTransfer Over The Internet Using Image CryptoSteganographyArun KrishNo ratings yet
- Sketchup Tutorial - 10 Steps To Create A Table in Sketchup: Getting Set UpDocument21 pagesSketchup Tutorial - 10 Steps To Create A Table in Sketchup: Getting Set UpkopikoNo ratings yet
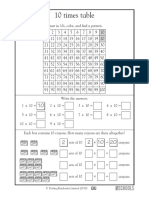
- 10 Times Table: © Dorling Kindersley Limited (2010)Document2 pages10 Times Table: © Dorling Kindersley Limited (2010)pryn ryn tumaponNo ratings yet
- AXYZ Design Convert BVH To BIPDocument3 pagesAXYZ Design Convert BVH To BIPpunisher001No ratings yet
- Banshee S03E07 1080p BluRay x264-KSRMDocument61 pagesBanshee S03E07 1080p BluRay x264-KSRMGeorge Alexandru RomanNo ratings yet
- To M/S.: GR InoftechDocument18 pagesTo M/S.: GR InoftechAbhilash JNo ratings yet
- EMTECH 2nd Grading 1Document6 pagesEMTECH 2nd Grading 1Alfie Lyn PedregosaNo ratings yet
- Ict JS2 2ND Term 2022Document4 pagesIct JS2 2ND Term 2022Edul BrianNo ratings yet
- Sitemap MagentoDocument304 pagesSitemap MagentostrecozzaNo ratings yet
- Mad Part 1 NotesDocument10 pagesMad Part 1 NotesVeeresh NikeeNo ratings yet