Download as pdf or txt
You might also like
- Police Management System Crime File (Body)Document53 pagesPolice Management System Crime File (Body)paresh59579% (14)
- Hitachi Scenaria PDFDocument67 pagesHitachi Scenaria PDFIndro P ReksodarmodjoNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- Canon Imagerunner Advance 8085, 8095, 8105 Series Service ManualDocument1,385 pagesCanon Imagerunner Advance 8085, 8095, 8105 Series Service ManualAlexanderChacon79% (19)
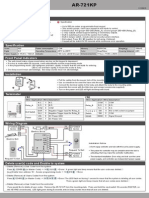
- Soyal - AR721 ManualDocument2 pagesSoyal - AR721 ManualMelody CottonNo ratings yet
- How Generate Graphical ReporterDocument10 pagesHow Generate Graphical ReporterJoshua Morris0% (1)
- Canopen Profiles For Extruder Downstream Devices: Part 1: General DefinitionsDocument17 pagesCanopen Profiles For Extruder Downstream Devices: Part 1: General Definitionsyomismo garciaNo ratings yet
- Canopen Electronic Data Sheet (Eds) : Public Available SpecificationDocument26 pagesCanopen Electronic Data Sheet (Eds) : Public Available SpecificationMaicon P SilvaNo ratings yet
- CAN Physical Layer For Industrial Applications: Public Available SpecificationDocument6 pagesCAN Physical Layer For Industrial Applications: Public Available SpecificationElectricitat-Electrònica IES Milà i FontanalsNo ratings yet
- Mcan Users Manual v302Document94 pagesMcan Users Manual v302ULISESNo ratings yet
- An IND 1 012 CAPL Callback InterfaceDocument14 pagesAn IND 1 012 CAPL Callback InterfaceMohamed A. Hassan BaidaqNo ratings yet
- 301 CanopenDocument136 pages301 CanopenMank UduyNo ratings yet
- ABBrec523 IECprotENcDocument144 pagesABBrec523 IECprotENczarakighostNo ratings yet
- EC-C+DC 11.1 ApplicationDocument28 pagesEC-C+DC 11.1 ApplicationMostafaElrakhawyNo ratings yet
- OCPP 2.0 Specification - RC1 0.97 PDFDocument198 pagesOCPP 2.0 Specification - RC1 0.97 PDFhirocks126No ratings yet
- Solution 1Document14 pagesSolution 1Ashit singhNo ratings yet
- CTI 2572-A Ethernet Tcp/Ip Module Installation and Operation GuideDocument132 pagesCTI 2572-A Ethernet Tcp/Ip Module Installation and Operation GuideRay JohnsonNo ratings yet
- Testing Dynamic Reports: Application NoteDocument17 pagesTesting Dynamic Reports: Application NoteViswanathan NarayananNo ratings yet
- Manual DeviceNet Fraba PositalDocument44 pagesManual DeviceNet Fraba PositalJoel JaramilloNo ratings yet
- Mlan-85clj2 R6 enDocument6 pagesMlan-85clj2 R6 enRogelio Mederos SentiNo ratings yet
- Canopen Performance Measurement Basics: Technical ReportDocument27 pagesCanopen Performance Measurement Basics: Technical ReportMaicon P SilvaNo ratings yet
- Ip Multi-Site Connect Application Notes r2.0 163Document52 pagesIp Multi-Site Connect Application Notes r2.0 163JohnNo ratings yet
- Feature Parameter Description: Domain Specific Access Control RAN12.0Document25 pagesFeature Parameter Description: Domain Specific Access Control RAN12.0svanditoNo ratings yet
- Asat Iec 61850 Client CG r1.1Document30 pagesAsat Iec 61850 Client CG r1.1rommel76No ratings yet
- 07-CDMA2000 Paging Optimization GuideDocument43 pages07-CDMA2000 Paging Optimization GuideproudpunkNo ratings yet
- Guide Specification - V1.9.1 - StruxureWare Building OperationDocument58 pagesGuide Specification - V1.9.1 - StruxureWare Building OperationJose sanchezNo ratings yet
- Cisco 1841 and Cisco 2801 Integrated Services Router FIPS 140-2 Security PolicyDocument38 pagesCisco 1841 and Cisco 2801 Integrated Services Router FIPS 140-2 Security PolicyGalih RezahNo ratings yet
- TM950TRE.40-ENG - POWERLINK Configuration and Diagnostics - V4000 PDFDocument80 pagesTM950TRE.40-ENG - POWERLINK Configuration and Diagnostics - V4000 PDFСергей ШилинNo ratings yet
- Delta Ia-Osw Diadesigner-Ax Um Eng 20210219Document417 pagesDelta Ia-Osw Diadesigner-Ax Um Eng 20210219Евгений ЛогиновNo ratings yet
- LMTDocument53 pagesLMTneeraj kumarNo ratings yet
- L506 Hardware Design: LTE Module Series Version V2.7 Date 2020-02-29Document73 pagesL506 Hardware Design: LTE Module Series Version V2.7 Date 2020-02-29jet.sharing.engNo ratings yet
- NT00156 en 08Document67 pagesNT00156 en 08BOUCHTAOUI IlyassNo ratings yet
- FIBERHOME Optical Transport Equipment Security Target: AprilDocument40 pagesFIBERHOME Optical Transport Equipment Security Target: AprilMuhammad AbdulfatahNo ratings yet
- 102 v03000003 Physical LayerDocument7 pages102 v03000003 Physical LayerhcoolmanNo ratings yet
- DCS Specification PDFDocument31 pagesDCS Specification PDFIsagani MadridNo ratings yet
- 5G RAN Feature Documentation 5G RAN2.0 - 01 20220702143207Document27 pages5G RAN Feature Documentation 5G RAN2.0 - 01 20220702143207ehsan souryNo ratings yet
- O-RAN WG4 IOT 0-v04 00Document122 pagesO-RAN WG4 IOT 0-v04 00mahyar777No ratings yet
- LTE Broadcast Reference UI: Release Notes 3.2.01.12 .0Document8 pagesLTE Broadcast Reference UI: Release Notes 3.2.01.12 .0burdun777No ratings yet
- 3hac059109 Am Local Io RW 6-EnDocument56 pages3hac059109 Am Local Io RW 6-Enkagasaw023No ratings yet
- ZXDU58 W121 DC Power System Product DescDocument35 pagesZXDU58 W121 DC Power System Product DescSergio SanchezNo ratings yet
- FSAP 9800: Technical ManualDocument116 pagesFSAP 9800: Technical ManualRobison Meirelles juniorNo ratings yet
- Control and Monitoring Systems: Ships / High Speed, Light Craft and Naval Surface CraftDocument26 pagesControl and Monitoring Systems: Ships / High Speed, Light Craft and Naval Surface CraftaseNo ratings yet
- Remote Operators SW Kit-A1-SmDocument38 pagesRemote Operators SW Kit-A1-SmAlfred Vivien BossonNo ratings yet
- BAS Technical SpecificationDocument43 pagesBAS Technical SpecificationDaniel Melo dos SantosNo ratings yet
- TP Link Switch TL SL3428Document32 pagesTP Link Switch TL SL3428Cuitlahuac AlamillaNo ratings yet
- Ec200 SeriesDocument28 pagesEc200 SerieshiuNo ratings yet
- Modbus Rtu - VipaDocument118 pagesModbus Rtu - VipaBruno SacuteNo ratings yet
- Profinet: Guideline Installation Guideline PROFINET Part 2: Network ComponentsDocument18 pagesProfinet: Guideline Installation Guideline PROFINET Part 2: Network ComponentsMarcos Paulo Menezes SilvaNo ratings yet
- Ocp - Att Open CSGR Spec-Draft 1Document15 pagesOcp - Att Open CSGR Spec-Draft 1DhirajNo ratings yet
- Canopen: Device Profile For EncodersDocument78 pagesCanopen: Device Profile For EncodersMohammad SholichudinNo ratings yet
- PMT Hps Ep03 500 100 Hps Fte SpecificationDocument26 pagesPMT Hps Ep03 500 100 Hps Fte SpecificationAbraham FarhadiNo ratings yet
- Electrical and Automation SpecificationDocument21 pagesElectrical and Automation SpecificationotwoNo ratings yet
- AQM Feature Parameter Description: Huawei Technologies Co., LTDDocument19 pagesAQM Feature Parameter Description: Huawei Technologies Co., LTDAdil MuradNo ratings yet
- REF 601/REJ 601/REM 601 IEC60870-5-103 CommunicationDocument26 pagesREF 601/REJ 601/REM 601 IEC60870-5-103 CommunicationCarlos RiveraNo ratings yet
- Inter Controller CAN Converter Global GuideDocument8 pagesInter Controller CAN Converter Global GuideMuhammad Shoaib HussainNo ratings yet
- 312 Color imageRUNNER C1030 1022 SM Rev0 102910Document534 pages312 Color imageRUNNER C1030 1022 SM Rev0 102910Klema HanisNo ratings yet
- Areva p642 Xrio Converter Manual Enu Tu2.30 v1.000Document7 pagesAreva p642 Xrio Converter Manual Enu Tu2.30 v1.000Mohd AlghunimatNo ratings yet
- Protection Terminals and Relay REF 54 - , RET 54 - , REX 521: Technical DescriptionDocument44 pagesProtection Terminals and Relay REF 54 - , RET 54 - , REX 521: Technical Descriptionfarzad dalaviNo ratings yet
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...From EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...No ratings yet
- The Internet of Things: Key Applications and ProtocolsFrom EverandThe Internet of Things: Key Applications and ProtocolsRating: 5 out of 5 stars5/5 (1)
- Opties en Accessoires Si Cia417 Solution User Guide en Iss3 0478 0618 03Document78 pagesOpties en Accessoires Si Cia417 Solution User Guide en Iss3 0478 0618 03Jarosław SkarbekNo ratings yet
- LGE2301Document5 pagesLGE2301Jarosław SkarbekNo ratings yet
- PDZ-B_SERDocument11 pagesPDZ-B_SERJarosław SkarbekNo ratings yet
- BSS84Document6 pagesBSS84Jarosław SkarbekNo ratings yet
- 2N2907-2N2907ADocument3 pages2N2907-2N2907AJarosław SkarbekNo ratings yet
- 2N7002DWH6327XTSA1Document9 pages2N7002DWH6327XTSA1Jarosław SkarbekNo ratings yet
- 2N IP Configuration Manual en 2.34Document247 pages2N IP Configuration Manual en 2.34Jarosław SkarbekNo ratings yet
- Hollow Shaft Encoder Connection Chart 5vDocument1 pageHollow Shaft Encoder Connection Chart 5vJarosław SkarbekNo ratings yet
- Baumer ITD69H00-Rectangular-signal en 20221006 DSDocument4 pagesBaumer ITD69H00-Rectangular-signal en 20221006 DSJarosław SkarbekNo ratings yet
- Installation and Operational Instructions For Half-Wave and Bridge Rectifiers Type 02 - .000.6Document4 pagesInstallation and Operational Instructions For Half-Wave and Bridge Rectifiers Type 02 - .000.6Jarosław SkarbekNo ratings yet
- Netconvis@ZasetDocument67 pagesNetconvis@ZasetJarosław SkarbekNo ratings yet
- Installation and Operational Instructions For Roba - Switch Type 017. - 00.2Document6 pagesInstallation and Operational Instructions For Roba - Switch Type 017. - 00.2Jarosław SkarbekNo ratings yet
- Safeline Lyra Manual v1 0 1 IntDocument40 pagesSafeline Lyra Manual v1 0 1 IntJarosław SkarbekNo ratings yet
- Top 5 Best (Free) CRM Softwares For Startups in 2021Document4 pagesTop 5 Best (Free) CRM Softwares For Startups in 2021sooriya naadhanNo ratings yet
- Deploy Exa VmwareDocument7 pagesDeploy Exa VmwareGame GMNo ratings yet
- Laptop Lenovo Foxcon-W06NDocument44 pagesLaptop Lenovo Foxcon-W06Nحسن علي نوفلNo ratings yet
- Office 2016 ActivationDocument1 pageOffice 2016 ActivationAbdul67% (6)
- M. Sc. (Computer Science)Document2 pagesM. Sc. (Computer Science)Alok H TripathiNo ratings yet
- Instructor Lab ManualDocument481 pagesInstructor Lab ManualWaivorchih Waibochi GiterhihNo ratings yet
- SAP PM Transaction CodesDocument3 pagesSAP PM Transaction CodesixselvarajNo ratings yet
- Lesson 4Document70 pagesLesson 4Duy LươngNo ratings yet
- How To Get Leads For Your Event On Autopilot With Dux-Soup Turbo PT 1Document11 pagesHow To Get Leads For Your Event On Autopilot With Dux-Soup Turbo PT 1AdrianNo ratings yet
- Network and Security - Foundations - C172 LogbookDocument3 pagesNetwork and Security - Foundations - C172 LogbookAmber CarrollNo ratings yet
- BTEC Unit 13 Website Design Course Planner 13-14aDocument15 pagesBTEC Unit 13 Website Design Course Planner 13-14aplymouthsteve08No ratings yet
- CV For WebsiteDocument6 pagesCV For WebsiteTalha PatelNo ratings yet
- StratAgile MEA Coffee Table BookDocument17 pagesStratAgile MEA Coffee Table BookAtul MALERINo ratings yet
- GEHC DICOM Conformance CentricityEnterpriseWeb 3 0 DOC0094970 Rev1 0Document9 pagesGEHC DICOM Conformance CentricityEnterpriseWeb 3 0 DOC0094970 Rev1 0RamskiNo ratings yet
- PD-400424 Rev B HolterCare 11.0.1 Release NotesDocument8 pagesPD-400424 Rev B HolterCare 11.0.1 Release NotesJain BabuNo ratings yet
- m1 Computers Handouts PDFDocument9 pagesm1 Computers Handouts PDFJennie AmandoNo ratings yet
- Programming Fundamentals CSC - 112Document37 pagesProgramming Fundamentals CSC - 112Zayn Ul AbdinNo ratings yet
- DimDocument9 pagesDimsridevi04No ratings yet
- 618 PeopleSoftDocument416 pages618 PeopleSoftchibaldwinNo ratings yet
- Aveva Instrumentation Installation User GuideDocument58 pagesAveva Instrumentation Installation User Guideengsoft64100% (2)
- QLC+ Manual 4.8.4 PDFDocument154 pagesQLC+ Manual 4.8.4 PDFAlberto HuerteroNo ratings yet
- 1MRB520051 Uen Operanting Instructions RET316 4Document864 pages1MRB520051 Uen Operanting Instructions RET316 4Almigdad AlwsilaNo ratings yet
- SDC40A. DigitroniK TM Digital Indicating Controller RSW. Control Unit PID (8) Auto Tuning+ Neuro & Fuzzy RUN - READY R - L LSP.Document12 pagesSDC40A. DigitroniK TM Digital Indicating Controller RSW. Control Unit PID (8) Auto Tuning+ Neuro & Fuzzy RUN - READY R - L LSP.SerhiiNo ratings yet
- ENEB PM & Big Data How FastDocument1 pageENEB PM & Big Data How FastParvatheesam PutikalapudiNo ratings yet
- OOPs PPTDocument14 pagesOOPs PPTSonali YadavNo ratings yet
- Super Notecard HelpDocument57 pagesSuper Notecard HelpCristina TontchevNo ratings yet
- Gigabyte Gv-N3070aorus M-8gd Pg142-b00 Rev 1.0Document57 pagesGigabyte Gv-N3070aorus M-8gd Pg142-b00 Rev 1.0agujasNo ratings yet