Download as pdf or txt
You might also like
- BS Iso 23864-2021Document42 pagesBS Iso 23864-2021AnrStuk100% (2)
- DCS FA-18C Hornet GuideDocument626 pagesDCS FA-18C Hornet Guidemarco100% (2)
- Assignment 11: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 11: Introduction To Machine Learning Prof. B. Ravindranpuranam SatyaNo ratings yet
- 1B40 Practical Skills: Weighted MeanDocument7 pages1B40 Practical Skills: Weighted MeanRoy VeseyNo ratings yet
- MIT14 30s09 Lec19Document7 pagesMIT14 30s09 Lec19Anushka ShettyNo ratings yet
- ECE275A Ass5Document4 pagesECE275A Ass5Deepak SridharNo ratings yet
- Branch Wise Chhattisgarh Sankra 14 8 2022Document18 pagesBranch Wise Chhattisgarh Sankra 14 8 2022Aditya SharmaNo ratings yet
- SampleQs Solutions PDFDocument20 pagesSampleQs Solutions PDFBasiru IbrahimNo ratings yet
- TOH NotesDocument8 pagesTOH NotesjonieokeloeNo ratings yet
- STAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018Document14 pagesSTAT-36700 Homework 4 - Solutions: Fall 2018 September 28, 2018DRizky Aziz SyaifudinNo ratings yet
- 1 Characteristics of Time Series 1.5 Estimation of CorrelationDocument29 pages1 Characteristics of Time Series 1.5 Estimation of CorrelationTrịnh TâmNo ratings yet
- Tutorial 10 SolutionDocument4 pagesTutorial 10 SolutionUjjwal BansalNo ratings yet
- Formula Rio 1Document1 pageFormula Rio 1Natercia RodriguesNo ratings yet
- PP 03 SolnDocument13 pagesPP 03 SolnKiyan RoyNo ratings yet
- Stat 400, Section 6.1b Point Estimates of Mean and VarianceDocument3 pagesStat 400, Section 6.1b Point Estimates of Mean and VarianceDRizky Aziz SyaifudinNo ratings yet
- Assignment 11: Introduction To Machine Learning Prof. B. RavindranDocument3 pagesAssignment 11: Introduction To Machine Learning Prof. B. RavindranPraveen Kumar KandhalaNo ratings yet
- Formulae SheetDocument11 pagesFormulae Sheetthyanh.vuNo ratings yet
- List of FormulasDocument7 pagesList of Formulastimeijkhout92No ratings yet
- A Proof of Goldbach ConjectureDocument9 pagesA Proof of Goldbach ConjectureMichel57No ratings yet
- Slides 535 Day 5 SPR 2014Document13 pagesSlides 535 Day 5 SPR 2014chandan chauhanNo ratings yet
- Maqola UchunDocument4 pagesMaqola UchunAzizbek AxmatovNo ratings yet
- RZFDocument14 pagesRZFari wiliamNo ratings yet
- SolutionsDocument7 pagesSolutionsmegiNo ratings yet
- Summations ADocument10 pagesSummations ADefault AccountNo ratings yet
- Stat 5002 Final Exam Formulas W 21Document7 pagesStat 5002 Final Exam Formulas W 21PaolaCastelwhiteNo ratings yet
- Notes 2a 2018-19 Elementary Prime TheoryDocument11 pagesNotes 2a 2018-19 Elementary Prime TheoryadrverharNo ratings yet
- Entropy S BMDocument5 pagesEntropy S BMNeha SharmaNo ratings yet
- Spring 2010Document3 pagesSpring 2010Robinson Ortega MezaNo ratings yet
- On The Riemann Hypothesis - The Conjecture "The Non-Trivial Zeros of Riemann's Zeta Have All Multiplicity 1" Is True! Further Mathematical Connections With Some Sectors of String Theory. (2009)Document33 pagesOn The Riemann Hypothesis - The Conjecture "The Non-Trivial Zeros of Riemann's Zeta Have All Multiplicity 1" Is True! Further Mathematical Connections With Some Sectors of String Theory. (2009)Michele NardelliNo ratings yet
- Formula Addmat SPMDocument2 pagesFormula Addmat SPMNurul'Ain MuhammadNo ratings yet
- CH 15Document19 pagesCH 15aNo ratings yet
- 3 The Rao-Blackwell Theorem: 3.1 Mean Squared ErrorDocument2 pages3 The Rao-Blackwell Theorem: 3.1 Mean Squared ErrorBakari HamisiNo ratings yet
- Quiz1 PDFDocument4 pagesQuiz1 PDFArpit JhunjhunwalaNo ratings yet
- Lec 2Document4 pagesLec 2Govind MgNo ratings yet
- Lar Math So15 MLDocument11 pagesLar Math So15 MLbenjamin AidooNo ratings yet
- PS4 SolnsDocument7 pagesPS4 SolnsULLAS SHETTYNo ratings yet
- Neymar PearsonDocument2 pagesNeymar PearsonYogiWahyudiNo ratings yet
- 2023TSP5Document3 pages2023TSP5leonaso6No ratings yet
- Formulario de PSM 2020-2021Document2 pagesFormulario de PSM 2020-2021margarida.mf13No ratings yet
- Homework 6: Math 308 Due: 8 MarchDocument3 pagesHomework 6: Math 308 Due: 8 MarchAlaa SaadNo ratings yet
- Lecture 6Document2 pagesLecture 6하홍근 (solpl)No ratings yet
- Formula SheetDocument2 pagesFormula SheetSwarnabha RayNo ratings yet
- Lecture4 More BayesDocument24 pagesLecture4 More BayesAla BalaNo ratings yet
- AdvancedntDocument14 pagesAdvancedntDefault AccountNo ratings yet
- MLE and MAP Ex PG 1-4 PrintDocument10 pagesMLE and MAP Ex PG 1-4 PrintsaumyaNo ratings yet
- 553.740 Project 2 Optimization. Fall 2020 Due On Wednesday October 21Document5 pages553.740 Project 2 Optimization. Fall 2020 Due On Wednesday October 21KoilamaNo ratings yet
- Prime Number Theory and The Riemann Zeta-FunctionDocument33 pagesPrime Number Theory and The Riemann Zeta-FunctionMustafa RhmNo ratings yet
- Exercise BayesianDocument2 pagesExercise BayesianpiergiorgioscaliaNo ratings yet
- 172 HW10Document1 page172 HW10Fausto SosaNo ratings yet
- MTH 515a: Inference-II Assignment No. 5: Asymptotically Efficient EstimatorsDocument3 pagesMTH 515a: Inference-II Assignment No. 5: Asymptotically Efficient EstimatorsMulyana KahfiNo ratings yet
- Splines: Fundamentos y Teor Ia de Aproximaci On: Tema 1: Espacios de Funciones de Tipo SplineDocument21 pagesSplines: Fundamentos y Teor Ia de Aproximaci On: Tema 1: Espacios de Funciones de Tipo SplineEduardo Daniel Farfán DuránNo ratings yet
- 2.1 The Wishart DistributionDocument4 pages2.1 The Wishart DistributionThrilling MeherabNo ratings yet
- 2 2 2 R R 0 R R R TX N ItDocument2 pages2 2 2 R R 0 R R R TX N ItKhalil RegaiegNo ratings yet
- Lecture 22Document7 pagesLecture 22djaberdjNo ratings yet
- Worksheet3 Solutions ADocument4 pagesWorksheet3 Solutions ABryant Junevan Henry MuliaNo ratings yet
- 1 R 1+r R 1 RDocument4 pages1 R 1+r R 1 RFaiz AnwarNo ratings yet
- B 2 Stochasticprocesses 2020Document5 pagesB 2 Stochasticprocesses 2020ARISINA BANERJEENo ratings yet
- Solutions To Exercises - Week 42 Exercise 7.47: Complete Sufficient Statistics and Best Unbiased EstimatorsDocument4 pagesSolutions To Exercises - Week 42 Exercise 7.47: Complete Sufficient Statistics and Best Unbiased Estimatorswindowme98naver.comNo ratings yet
- Polynomial Multiplication and Fast Fourier Transform - 2008Document5 pagesPolynomial Multiplication and Fast Fourier Transform - 2008Delmiro PaesNo ratings yet
- Chapter 103 Even and Odd Functions and Half-Range Fourier SeriesDocument12 pagesChapter 103 Even and Odd Functions and Half-Range Fourier SeriesBaibhav MohantyNo ratings yet
- List of Formulae and Normal TableDocument3 pagesList of Formulae and Normal Table梦魇spiritNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Introduction of Insulation CoordinationDocument5 pagesIntroduction of Insulation CoordinationTaher El NoamanNo ratings yet
- Codes SamplesDocument3,369 pagesCodes Samplestoteu.comNo ratings yet
- Project Planning & Controls rEV. 2Document38 pagesProject Planning & Controls rEV. 2Vijay KambleNo ratings yet
- Chap6 - Engineering Measurements and EstimationsDocument36 pagesChap6 - Engineering Measurements and EstimationsalsinanhananNo ratings yet
- Only The Ring Finger Knows 1Document178 pagesOnly The Ring Finger Knows 1Noc Lillard50% (2)
- Spam Message Detection Using Logistic RegressionDocument4 pagesSpam Message Detection Using Logistic RegressionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Installation Users Guide 200-X Rev A2Document28 pagesInstallation Users Guide 200-X Rev A2Jean-Claude DNo ratings yet
- Anusha1report FinalDocument28 pagesAnusha1report FinalGoutam NaikNo ratings yet
- ML Interview Questions and AnswersDocument25 pagesML Interview Questions and Answerssantoshguddu100% (1)
- Gardner-Denver@: Triplex PlungerDocument38 pagesGardner-Denver@: Triplex PlungerLibardo Alfonso Cadena Rodriguez100% (1)
- Directional DrillingDocument32 pagesDirectional DrillingDante SchneiderNo ratings yet
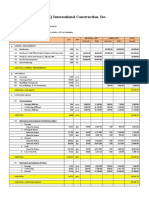
- JQ International Construction, IncDocument2 pagesJQ International Construction, Incyael rodriguez100% (1)
- HMMT 24Document71 pagesHMMT 24nov428571No ratings yet
- Uw Cse HomeworkDocument5 pagesUw Cse Homeworkcjcq3442100% (1)
- Ei M Y4Document209 pagesEi M Y4bhadz SabellaNo ratings yet
- Tiggo 5 t21Document253 pagesTiggo 5 t21Akram SiddigNo ratings yet
- B2. Formatting Text Using TagsDocument27 pagesB2. Formatting Text Using TagsHuỳnh Tôn Minh QuânNo ratings yet
- Fyp1 Proposal Defense Malaysian Traffic Signs Classification With Deep LearningDocument15 pagesFyp1 Proposal Defense Malaysian Traffic Signs Classification With Deep LearningAmir Johan Abd AzizNo ratings yet
- Quality Assurance Handbook 1677275668Document140 pagesQuality Assurance Handbook 1677275668r2mgt28ssvNo ratings yet
- To Microcontrollers: 8051 Microcontroller Suresh.P.Nair, HOD - ECE, RCET 1Document38 pagesTo Microcontrollers: 8051 Microcontroller Suresh.P.Nair, HOD - ECE, RCET 1PeaceNo ratings yet
- URIT-660 Service Manual PDFDocument15 pagesURIT-660 Service Manual PDFCharlys RajaobelinaNo ratings yet
- Battery Energy Storage System Procurement ChecklistDocument6 pagesBattery Energy Storage System Procurement ChecklistMuhammad MuneebNo ratings yet
- Franchezka Pegollo BSBM M 3-1 Toshiba Corporation Corporate InformationDocument4 pagesFranchezka Pegollo BSBM M 3-1 Toshiba Corporation Corporate InformationFranchezka PegolloNo ratings yet
- Mining Solutions: Implicit ModellingDocument5 pagesMining Solutions: Implicit ModellingZainal AmanahNo ratings yet
- Test Bank For Contemporary Project Management 4th EditionDocument17 pagesTest Bank For Contemporary Project Management 4th EditionJacob Payne100% (39)
- How To Fix Windows 11 Indexing Is Paused (File Search Not Working)Document36 pagesHow To Fix Windows 11 Indexing Is Paused (File Search Not Working)Mohammed Zahid AnsariNo ratings yet
- Unit I-Cloud ComputingDocument29 pagesUnit I-Cloud ComputingAR OFFICIALNo ratings yet
- Alcatel 1660 SMDocument8 pagesAlcatel 1660 SMILiketobWithuNo ratings yet