Download as pdf or txt
You might also like
- Daewoo Doosan Service Manual Engine Marine L136 - L136T - L136TI - L086TI PDFDocument232 pagesDaewoo Doosan Service Manual Engine Marine L136 - L136T - L136TI - L086TI PDFDimas Saputro100% (3)
- Fit To Fly Expecting MotherDocument1 pageFit To Fly Expecting MotherAdnanAlamKhanNo ratings yet
- SAFe PI Planning Simulation Handout (5.1)Document9 pagesSAFe PI Planning Simulation Handout (5.1)Nadia DolbaraevaNo ratings yet
- (Kenneth H. Rose) Project Quality Management WhyDocument9 pages(Kenneth H. Rose) Project Quality Management Whydiana nistoranNo ratings yet
- Introduction To Maritime LawDocument13 pagesIntroduction To Maritime Lawplatonalexandru67% (3)
- Numeric A Reasoning PracticeDocument9 pagesNumeric A Reasoning Practicemujtaba1101100% (1)
- OGLOBE ch01Document36 pagesOGLOBE ch01lasap okNo ratings yet
- CHC2016 Poster - CzotterDocument1 pageCHC2016 Poster - CzotterNavinNo ratings yet
- BATHYMETRYDocument41 pagesBATHYMETRYScribdTranslationsNo ratings yet
- Advances in Seismic AcquisitionDocument78 pagesAdvances in Seismic AcquisitioneesNo ratings yet
- Advances in Seismic AcquisitionDocument78 pagesAdvances in Seismic AcquisitioneesNo ratings yet
- A Wide-Area Deep Ocean Floor Mapping System DesignDocument22 pagesA Wide-Area Deep Ocean Floor Mapping System DesignThomas ThomasNo ratings yet
- Dierssen 2014 ENRMethods ColorDocument9 pagesDierssen 2014 ENRMethods ColorDeepak KumarNo ratings yet
- DAS Submarine Structural CharacterizationDocument14 pagesDAS Submarine Structural Characterizationhoniwi3818No ratings yet
- Ihr 29 2 N04Document6 pagesIhr 29 2 N04janatb027No ratings yet
- Chapter 4 - Radar NavigationDocument44 pagesChapter 4 - Radar NavigationkumarNo ratings yet
- Seafloor MorphologyDocument7 pagesSeafloor MorphologyWanda Rozentryt100% (1)
- Tugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DDocument8 pagesTugas 01 KL 3103 Pengumpulan Dan Data Analisis Lapangan: Irsan Soemantri B. PH.DMuhammad Wahid SiddikNo ratings yet
- Gao 2009Document15 pagesGao 2009Jamhur SudjanaNo ratings yet
- Ep Shell Geosphere PDFDocument2 pagesEp Shell Geosphere PDFIván VelázquezNo ratings yet
- Ep Shell Geosphere PDFDocument2 pagesEp Shell Geosphere PDFIván VelázquezNo ratings yet
- Presented by Imtiaz Ahmed KhanDocument37 pagesPresented by Imtiaz Ahmed KhanImtiaz Ahmed KhanNo ratings yet
- 06 Sut221 32 (4) 61169Document8 pages06 Sut221 32 (4) 61169Benny AlconnNo ratings yet
- Underwater Inspection Using SonarDocument8 pagesUnderwater Inspection Using SonarAditi WadekarNo ratings yet
- First Dual-Sensor Ocean Bottom Cable 3D Seismic AcquisitionDocument13 pagesFirst Dual-Sensor Ocean Bottom Cable 3D Seismic Acquisitionzeze_13No ratings yet
- PEAU7003 Lecture 9 17aug2017Document29 pagesPEAU7003 Lecture 9 17aug2017satyajitchowdhuryNo ratings yet
- Contour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorDocument6 pagesContour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorGuilherme OliveiraNo ratings yet
- Technology and Economy of Ocean Bottom NodesDocument5 pagesTechnology and Economy of Ocean Bottom NodesMark ConnollyNo ratings yet
- Underwater Inspection Using Sonar-Based Volumetric SubmapsDocument8 pagesUnderwater Inspection Using Sonar-Based Volumetric SubmapsGuilherme OliveiraNo ratings yet
- Uji StatistikaDocument8 pagesUji StatistikarararahmaniaNo ratings yet
- Geophysical and Geotechnical Surveys For Submarine Cables Installations: Main Applications and MethodsDocument5 pagesGeophysical and Geotechnical Surveys For Submarine Cables Installations: Main Applications and MethodslucioamaNo ratings yet
- Vista Clara Spec Sheet Dart WebDocument4 pagesVista Clara Spec Sheet Dart WebDavid BendezúNo ratings yet
- 1 s2.0 S2352938523001672 MainDocument17 pages1 s2.0 S2352938523001672 Mainm.eljanatiNo ratings yet
- Battery-Free Wireless Imaging of Underwater EnvironmentsDocument9 pagesBattery-Free Wireless Imaging of Underwater EnvironmentsDeepak Singh YadavNo ratings yet
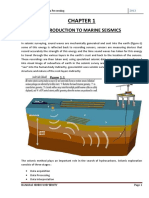
- Final Dissertation Introduction To Marine Seismics PDFDocument66 pagesFinal Dissertation Introduction To Marine Seismics PDFjast5No ratings yet
- Bathymetry DS BATHDocument2 pagesBathymetry DS BATHPorche GtrNo ratings yet
- HuntingtheSoundofSilence RVDocument35 pagesHuntingtheSoundofSilence RVRahat JobayarNo ratings yet
- C - 1 Hydro BasicDocument25 pagesC - 1 Hydro BasicZannatul NayemaNo ratings yet
- 1 利用卫星测高和深度学习技术监测内陆水位Document14 pages1 利用卫星测高和深度学习技术监测内陆水位1005061707No ratings yet
- Keywords-Shallow Groundwater Magnetic Resonance Sounding Detection EfficiencyDocument2 pagesKeywords-Shallow Groundwater Magnetic Resonance Sounding Detection EfficiencyAfria BudimanNo ratings yet
- Leg Leiter A Gu 12 PosterDocument1 pageLeg Leiter A Gu 12 PosterlarrygoestogreenlandNo ratings yet
- General Facts About The Lidar TechniqueDocument29 pagesGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Elementary and Higher Surveying: (Laboratory)Document7 pagesElementary and Higher Surveying: (Laboratory)JohnDominicMoralesNo ratings yet
- The Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyDocument10 pagesThe Effect of Sound Velocity Errors On Multi-Beam Sonar Depth AccuracyvesmsxNo ratings yet
- Les 4Document18 pagesLes 4Ragavan MuraliNo ratings yet
- Bounce Sonar Submarine: Bottom ArrayDocument14 pagesBounce Sonar Submarine: Bottom ArrayBib GmzNo ratings yet
- Mecanização e Ou Robotização para Preparo e Inspeção Da Superfície para PinturaDocument8 pagesMecanização e Ou Robotização para Preparo e Inspeção Da Superfície para PinturaBrigida Bastos De AlmeidaNo ratings yet
- Hydro Survey Mod 2 Lec BSGE 2A BaldoviDocument7 pagesHydro Survey Mod 2 Lec BSGE 2A BaldoviLoki Balder BaldoviNo ratings yet
- SD Voyager-Bathymetry Product Card r9Document2 pagesSD Voyager-Bathymetry Product Card r9Matin TabatabaeeNo ratings yet
- Site Investigation Schedule of WorksDocument9 pagesSite Investigation Schedule of Worksdjelen32No ratings yet
- 2010 CV 251 (Hydrographic Surveying)Document5 pages2010 CV 251 (Hydrographic Surveying)Adil FaiyazNo ratings yet
- Nurwanto, Tomy PDFDocument197 pagesNurwanto, Tomy PDFNguyễn QuânNo ratings yet
- Shooting Seismic Surveys in Circles PDFDocument14 pagesShooting Seismic Surveys in Circles PDFJOSE GNo ratings yet
- C - 10 Integration of Bathymetric and Topographic Lidar - A Preliminary - InvestigationDocument6 pagesC - 10 Integration of Bathymetric and Topographic Lidar - A Preliminary - InvestigationZannatul NayemaNo ratings yet
- Stumpf Et Al. 2003Document10 pagesStumpf Et Al. 2003pwelNo ratings yet
- Marine and Land Seismic AquisitionDocument3 pagesMarine and Land Seismic AquisitionMiko Rc SevenNo ratings yet
- Uwsn Milcom 2005 PDFDocument7 pagesUwsn Milcom 2005 PDFamit guptaNo ratings yet
- Passive and Active Attitude Stabilization For A Tow-FishDocument6 pagesPassive and Active Attitude Stabilization For A Tow-FishiskojekekNo ratings yet
- Analysis of An Autonomous Underwater GliderDocument10 pagesAnalysis of An Autonomous Underwater GliderZein Al-Abedeen BarhoumNo ratings yet
- Sedimentos GuajaroDocument15 pagesSedimentos GuajaroJimmy G Torres CadenaNo ratings yet
- Remotesensing 13 03641Document13 pagesRemotesensing 13 03641vngsasNo ratings yet
- Underwater Objects Detection System Choice For HaDocument13 pagesUnderwater Objects Detection System Choice For HaTrầnHữuHòaNo ratings yet
- 03 2739 PDFDocument6 pages03 2739 PDFDiksha GuptaNo ratings yet
- Performance Evaluation of The Velodyne VLP-16 System, Kidd - Et - Al - CHC2016 - Proceeding - PaperDocument10 pagesPerformance Evaluation of The Velodyne VLP-16 System, Kidd - Et - Al - CHC2016 - Proceeding - PaperAndrew PasqualeNo ratings yet
- drucksDocument18 pagesdrucksNavinNo ratings yet
- HGG.1B.305.CLNPDocument3 pagesHGG.1B.305.CLNPNavinNo ratings yet
- NGPSAcronyms-GlossaryDocument20 pagesNGPSAcronyms-GlossaryNavinNo ratings yet
- mpm4706-digital-level-transmitter-operation-manualDocument12 pagesmpm4706-digital-level-transmitter-operation-manualNavinNo ratings yet
- MPM4706-4736-Operation-ManualDocument12 pagesMPM4706-4736-Operation-ManualNavinNo ratings yet
- 89176_R2Sonic_240103Document2 pages89176_R2Sonic_240103NavinNo ratings yet
- 20180620 PING Mine WarfareDocument2 pages20180620 PING Mine WarfareNavinNo ratings yet
- 04008333C-DataLog_Terminal_x2Document43 pages04008333C-DataLog_Terminal_x2NavinNo ratings yet
- hydro_linz-contract-specifications-for-hydrographic-surveys_20160607_0Document96 pageshydro_linz-contract-specifications-for-hydrographic-surveys_20160607_0NavinNo ratings yet
- BoydenDocument3 pagesBoydenNavinNo ratings yet
- Case Study_ 3DSS-DX-450 SonarDocument5 pagesCase Study_ 3DSS-DX-450 SonarNavinNo ratings yet
- MBES Bathymetry EngineDocument6 pagesMBES Bathymetry EngineNavinNo ratings yet
- CHC2016 Poster - CzotterDocument1 pageCHC2016 Poster - CzotterNavinNo ratings yet
- Omni Brochure ColoredDocument2 pagesOmni Brochure ColoredMichael Jann Mendoza MoronesNo ratings yet
- Effect of Tack Coat Application On Interlayer Shear Strength of Asphalt Pavement: A State-Of-The-Art Review Based On Application in The United StatesDocument12 pagesEffect of Tack Coat Application On Interlayer Shear Strength of Asphalt Pavement: A State-Of-The-Art Review Based On Application in The United StatesNgân KimNo ratings yet
- BBE15 EP5 Instar GE PowerDocument37 pagesBBE15 EP5 Instar GE PowerTVP_contechNo ratings yet
- Collection of Solid WasteDocument38 pagesCollection of Solid WasteMuhammad UsmanNo ratings yet
- Module 3Document21 pagesModule 3Isaac SenyohNo ratings yet
- Klw4000n Air Pump ManualDocument22 pagesKlw4000n Air Pump ManualduduqueNo ratings yet
- 23.07.2022 - Updated NITDocument2 pages23.07.2022 - Updated NITShalini BorkerNo ratings yet
- Truck CatalogDocument652 pagesTruck CatalogFred RuizNo ratings yet
- Motorespecificaciones 1GRFEDocument2 pagesMotorespecificaciones 1GRFEChirigol DiazNo ratings yet
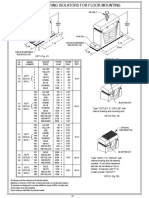
- Spring IsolatorDocument8 pagesSpring IsolatorJuanPabloGonzalezFiblasNo ratings yet
- Statistical Year Book 2011Document86 pagesStatistical Year Book 2011Chukwukadibia E. NwaforNo ratings yet
- ESP Unit 1-1Document38 pagesESP Unit 1-1Yosef KirosNo ratings yet
- A. Navigation Rules For MarinersDocument225 pagesA. Navigation Rules For MarinersnavyeyeNo ratings yet
- Lilius vs. Manila Railroad Co. 59 Phil. 758Document1 pageLilius vs. Manila Railroad Co. 59 Phil. 758Jenine QuiambaoNo ratings yet
- Kopi-O: Seating ProductsDocument8 pagesKopi-O: Seating Productsishanj1991No ratings yet
- Road Transport Is The Main Source of Environmental PollutionDocument3 pagesRoad Transport Is The Main Source of Environmental PollutionResearch ParkNo ratings yet
- BCS Invictus K600 - OnderdelenboekDocument167 pagesBCS Invictus K600 - OnderdelenboekJeroen BuijsNo ratings yet
- Mathematical Model of Magnetite Oxidation in A Rotary Kiln FurnaceDocument6 pagesMathematical Model of Magnetite Oxidation in A Rotary Kiln Furnacedavibraga8041No ratings yet
- Heritage ConservationDocument86 pagesHeritage ConservationPriyanka Rajani100% (1)
- Bajaj Auto Ltd.Document24 pagesBajaj Auto Ltd.ROHIT AGARWAL-RMNo ratings yet
- Aporte atDocument447 pagesAporte atAndres Mauricio TorresNo ratings yet
- Bataclan v. MedinaDocument2 pagesBataclan v. MedinaEva TrinidadNo ratings yet
- Code NotamDocument13 pagesCode NotamblobblobblobNo ratings yet
- Renault Kiger: Make The MoodDocument13 pagesRenault Kiger: Make The MoodAntoninoNo ratings yet
- Chekpeds - Sanitation RfeiDocument20 pagesChekpeds - Sanitation RfeiGersh KuntzmanNo ratings yet