
2010_Vol48_65-78
2010_Vol48_65-78
You might also like
- Train Coupler Longitudinal Effect 13Document22 pagesTrain Coupler Longitudinal Effect 13Chuck LiddellNo ratings yet
- Tow HookDocument8 pagesTow HookAmulya ManthaNo ratings yet
- Tables of R22 Ammonia R134aDocument17 pagesTables of R22 Ammonia R134aStar GlacierNo ratings yet
- Vehicle System Dynamics: Please Scroll Down For ArticleDocument16 pagesVehicle System Dynamics: Please Scroll Down For ArticleBinhMinh NguyenNo ratings yet
- Design and Analysis of Impact Attenuator For Student FormulaDocument6 pagesDesign and Analysis of Impact Attenuator For Student FormulaAditi KaradeNo ratings yet
- 2010_Vol48_41-64Document26 pages2010_Vol48_41-64Vicente BentoNo ratings yet
- Peng 1996Document21 pagesPeng 1996Ali ShamsodiniNo ratings yet
- Finite Element Analysis of Fatigue Life of Suspension Coil SpringDocument6 pagesFinite Element Analysis of Fatigue Life of Suspension Coil SpringSameer SinghNo ratings yet
- Effects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFDocument9 pagesEffects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFvijayNo ratings yet
- Analisi Parametri Base McPherson StrutDocument20 pagesAnalisi Parametri Base McPherson StrutDomenico GarofaloNo ratings yet
- IMechE-PartF 2014Document16 pagesIMechE-PartF 2014harshads1502No ratings yet
- Spry 2008Document16 pagesSpry 2008Miguel DiazNo ratings yet
- Applied SciencesDocument21 pagesApplied SciencesNelson AbaraNo ratings yet
- Mechanical Engineering Research Journal: M E R JDocument5 pagesMechanical Engineering Research Journal: M E R JAntônio Luiz MaiaNo ratings yet
- SSRN 4480660Document6 pagesSSRN 4480660kevinsuyu21No ratings yet
- Analysis of Accelerating and Braking Stability Using Constrained Bifurcation and Continuation MethodsDocument16 pagesAnalysis of Accelerating and Braking Stability Using Constrained Bifurcation and Continuation MethodsAngulumaNo ratings yet
- Yaw Damper Modelling and Its Influence On Railway Dynamic StabilityDocument24 pagesYaw Damper Modelling and Its Influence On Railway Dynamic StabilityainaraNo ratings yet
- Design of An Ackermann Type Steering MechanismDocument15 pagesDesign of An Ackermann Type Steering MechanismIkshwakNo ratings yet
- Lateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingDocument29 pagesLateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingLuong Ngoc MinhNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument24 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityLe Huy HoangNo ratings yet
- Design of An Ackermann Type Steering Mechanism: ArticleDocument15 pagesDesign of An Ackermann Type Steering Mechanism: ArticleKaasamHarishKumarNo ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Dhayou GraphyNo ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060suresh_501No ratings yet
- Analysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkeDocument6 pagesAnalysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkehadiNo ratings yet
- Experimental Study of The Dynamic Characteristics of Rubber Mounts For Agricultural Tractor CabinDocument8 pagesExperimental Study of The Dynamic Characteristics of Rubber Mounts For Agricultural Tractor CabinGabriel AguirreNo ratings yet
- Mechanics Based Design of Structures and Machines: An International JournalDocument27 pagesMechanics Based Design of Structures and Machines: An International JournalBajolNo ratings yet
- Dynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleDocument13 pagesDynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleH VNo ratings yet
- Review Paper FINALDocument7 pagesReview Paper FINALPappuNo ratings yet
- Fatigue Analysis and Optimization of Upright of A FSAE VehicleDocument6 pagesFatigue Analysis and Optimization of Upright of A FSAE Vehiclepreetham saiNo ratings yet
- Dong 等 - 2021 - Investigation of the Vibration Features and DynamiDocument15 pagesDong 等 - 2021 - Investigation of the Vibration Features and Dynami王磊No ratings yet
- Braking Performance Analysis of An Escalator System Using Multibody Dynamics Simulation TechnologyDocument7 pagesBraking Performance Analysis of An Escalator System Using Multibody Dynamics Simulation Technologya_salehiNo ratings yet
- Effect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringDocument5 pagesEffect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringBerkay ÇelikNo ratings yet
- Analysis of The Kinematics and Compliance of A PasDocument10 pagesAnalysis of The Kinematics and Compliance of A Paspad abtNo ratings yet
- Outrigger Force Measurefor Mobile Crane Safety Basedon Linear Programming OptimizationDocument28 pagesOutrigger Force Measurefor Mobile Crane Safety Basedon Linear Programming OptimizationThùyNo ratings yet
- IJIRSTV2I11252Document11 pagesIJIRSTV2I11252Vincent RobinsonNo ratings yet
- Dobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034Document11 pagesDobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034pinabarrosNo ratings yet
- Jay A Chandran 2012Document10 pagesJay A Chandran 2012Dragos BotnariNo ratings yet
- Consideration of Suspension Mechanism WithDocument10 pagesConsideration of Suspension Mechanism WithRushik KudaleNo ratings yet
- Irjet V2i7116 PDFDocument8 pagesIrjet V2i7116 PDFSantiago UrgilesNo ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Suspension Optimization For Reducing Body RollDocument16 pagesSuspension Optimization For Reducing Body RollJ-56 Krishna p hollaNo ratings yet
- Zhou 2019 IOP Conf. Ser. Mater. Sci. Eng. 538 012068Document18 pagesZhou 2019 IOP Conf. Ser. Mater. Sci. Eng. 538 012068FWEFWEFWNo ratings yet
- Processes 10 00940 v2Document18 pagesProcesses 10 00940 v2allwinkunnathNo ratings yet
- 1990_Vol19_49-70Document23 pages1990_Vol19_49-70Vicente BentoNo ratings yet
- Outrigger Force Measure For Mobile Crane Safety Based On Linear Programming OptimizationDocument28 pagesOutrigger Force Measure For Mobile Crane Safety Based On Linear Programming OptimizationSherlyn Corpuz Cortes-JavelosaNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument5 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityAlberto CarbajalNo ratings yet
- Ijresm V4 I7 100Document9 pagesIjresm V4 I7 100saxadi4814No ratings yet
- Park 1999Document17 pagesPark 1999ricmf89No ratings yet
- Materials 14 03356Document18 pagesMaterials 14 03356dadheganesh29No ratings yet
- STEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemDocument8 pagesSTEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemCigifarmNo ratings yet
- Wu 2018Document14 pagesWu 2018Rayhan Fajar SatrioNo ratings yet
- MRAC High OrderActuatorDynamicsDocument16 pagesMRAC High OrderActuatorDynamicsKrisdannerNo ratings yet
- An Improved Particle Swarm Optimization AlgorithmDocument11 pagesAn Improved Particle Swarm Optimization AlgorithmOussama AkrmiNo ratings yet
- Turning Ability of A Ship Towing SystemDocument15 pagesTurning Ability of A Ship Towing SystemFerfer BarbarNo ratings yet
- Electrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewDocument7 pagesElectrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewPappuNo ratings yet
- Design Analysis of Automatic Pneumatic Bumpers For 4-Wheelers Subjected To Dynamic AnalysisDocument6 pagesDesign Analysis of Automatic Pneumatic Bumpers For 4-Wheelers Subjected To Dynamic AnalysisFinger igNo ratings yet
- High Performance System Dynamics Simulation of The Entire System Tire-Suspension-Steering-VehicleDocument22 pagesHigh Performance System Dynamics Simulation of The Entire System Tire-Suspension-Steering-VehicleSabajonhsons SmithNo ratings yet
- Symmetry 15 00159Document22 pagesSymmetry 15 00159vishwas peshwaNo ratings yet
- OSEK-1995Document10 pagesOSEK-1995Vicente BentoNo ratings yet
- controle injeção EGO-940972Document15 pagescontrole injeção EGO-940972Vicente BentoNo ratings yet
- Chatter Clutch-pime_proc_1973Document11 pagesChatter Clutch-pime_proc_1973Vicente BentoNo ratings yet
- InjeçãoDireta1998Document13 pagesInjeçãoDireta1998Vicente BentoNo ratings yet
- Air Fuel control- 810494Document18 pagesAir Fuel control- 810494Vicente BentoNo ratings yet
- idle control Hrovat 1997Document8 pagesidle control Hrovat 1997Vicente BentoNo ratings yet
- modal anlysis-understandingDocument11 pagesmodal anlysis-understandingVicente BentoNo ratings yet
- E throtle C-1999Document8 pagesE throtle C-1999Vicente BentoNo ratings yet
- 1990_Vol19_237-253Document18 pages1990_Vol19_237-253Vicente BentoNo ratings yet
- 1990_Vol19_49-70Document23 pages1990_Vol19_49-70Vicente BentoNo ratings yet
- Optimal Control F1Document17 pagesOptimal Control F1Vicente BentoNo ratings yet
- Reports Brochure-Infraline EnergyDocument10 pagesReports Brochure-Infraline EnergyInfraline EnergyNo ratings yet
- Datasheet VatimetroDocument1 pageDatasheet VatimetroMarjorie MulloNo ratings yet
- Steam Blowing Steam Blowing Procedure PDFDocument11 pagesSteam Blowing Steam Blowing Procedure PDFAdelAbdElhamidNo ratings yet
- CD+ 25-260 Product Description EN Antwerp API 146E 46L1 Ed 00Document6 pagesCD+ 25-260 Product Description EN Antwerp API 146E 46L1 Ed 00Jesus MartinezNo ratings yet
- Reaction PaperDocument4 pagesReaction PaperHerjay Racho SulapasNo ratings yet
- Energy Medicine PDFDocument14 pagesEnergy Medicine PDFMonicaNo ratings yet
- Multix PowerDocument68 pagesMultix PowerTessa HernandezNo ratings yet
- CVT and CC - North American BrochureDocument8 pagesCVT and CC - North American Brochurejose dupimNo ratings yet
- Sta 434aDocument3 pagesSta 434aChack RelaxsNo ratings yet
- Micod: Si Detector KVANTDocument2 pagesMicod: Si Detector KVANTDoka OlddokaNo ratings yet
- ABB MV-LV TransformerDocument44 pagesABB MV-LV Transformeryarafat007No ratings yet
- Total Building Solutions For Hospitals: The Next Generation of IntelligenceDocument8 pagesTotal Building Solutions For Hospitals: The Next Generation of Intelligenceابو محمد البصري العراقيNo ratings yet
- Electrical DesignDocument4 pagesElectrical DesignKrishna AdinaNo ratings yet
- Prorox SL 950 SaDocument1 pageProrox SL 950 SaHardiman ArbiNo ratings yet
- Europacable Cable Technology UpdateDocument13 pagesEuropacable Cable Technology UpdateA. HassanNo ratings yet
- Pico Hydro Operational TrainingDocument25 pagesPico Hydro Operational TrainingSandeep JoshiNo ratings yet
- MBRB 2545CT - Diodo SchottkyDocument6 pagesMBRB 2545CT - Diodo SchottkyTiago LeonhardtNo ratings yet
- Jaguar V8-V6 Engine Workshop Manual-352 Pgs.Document352 pagesJaguar V8-V6 Engine Workshop Manual-352 Pgs.David McgregorNo ratings yet
- Objectives: Experiment 6: Study of A Position Control ServomechanismDocument8 pagesObjectives: Experiment 6: Study of A Position Control ServomechanismU V DurgaraoNo ratings yet
- Experiment 1 1Document57 pagesExperiment 1 1Christine Mae VeaNo ratings yet
- Atoms: Chapter TwelveDocument16 pagesAtoms: Chapter TwelveBhoomika VijayakumarNo ratings yet
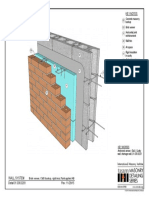
- Key Notes: Wall SystemDocument1 pageKey Notes: Wall SystemMyo Min ThuNo ratings yet
- Modular Multilevel Converter Control Strategy With Fault ToleranceDocument6 pagesModular Multilevel Converter Control Strategy With Fault TolerancesatyacvaNo ratings yet
- Menurunkan Frekuensi Breakdown Low Power Pada Unit Wa500-3 Komatsu Di PT Kalimantan Prima Persada Site Port Sungai PutingDocument6 pagesMenurunkan Frekuensi Breakdown Low Power Pada Unit Wa500-3 Komatsu Di PT Kalimantan Prima Persada Site Port Sungai PutingPrana Desamba Dela RajaNo ratings yet
- Session 2-2 - Building System - Electrical System ComponentsDocument48 pagesSession 2-2 - Building System - Electrical System ComponentsCeino Rey QuimintanNo ratings yet
- Transformer Vector GroupsDocument17 pagesTransformer Vector GroupsDheeraj YadavNo ratings yet
- Use of Nanomaterials in Cementing ApplicationsDocument0 pagesUse of Nanomaterials in Cementing ApplicationsMobeen MurtazaNo ratings yet
- OpelDocument8 pagesOpelCristi NaNo ratings yet
- Me Gi Gie Pump Vaporizer Unit For LNG and Ethane EngDocument5 pagesMe Gi Gie Pump Vaporizer Unit For LNG and Ethane Engionut nicolaeNo ratings yet



































































































Download as pdf or txt
You might also like
- Train Coupler Longitudinal Effect 13Document22 pagesTrain Coupler Longitudinal Effect 13Chuck LiddellNo ratings yet
- Tow HookDocument8 pagesTow HookAmulya ManthaNo ratings yet
- Tables of R22 Ammonia R134aDocument17 pagesTables of R22 Ammonia R134aStar GlacierNo ratings yet
- Vehicle System Dynamics: Please Scroll Down For ArticleDocument16 pagesVehicle System Dynamics: Please Scroll Down For ArticleBinhMinh NguyenNo ratings yet
- Design and Analysis of Impact Attenuator For Student FormulaDocument6 pagesDesign and Analysis of Impact Attenuator For Student FormulaAditi KaradeNo ratings yet
- 2010_Vol48_41-64Document26 pages2010_Vol48_41-64Vicente BentoNo ratings yet
- Peng 1996Document21 pagesPeng 1996Ali ShamsodiniNo ratings yet
- Finite Element Analysis of Fatigue Life of Suspension Coil SpringDocument6 pagesFinite Element Analysis of Fatigue Life of Suspension Coil SpringSameer SinghNo ratings yet
- Effects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFDocument9 pagesEffects of Damping Parameters On Damping Force of Two Wheeler Front Suspension IJERTV2IS70190 PDFvijayNo ratings yet
- Analisi Parametri Base McPherson StrutDocument20 pagesAnalisi Parametri Base McPherson StrutDomenico GarofaloNo ratings yet
- IMechE-PartF 2014Document16 pagesIMechE-PartF 2014harshads1502No ratings yet
- Spry 2008Document16 pagesSpry 2008Miguel DiazNo ratings yet
- Applied SciencesDocument21 pagesApplied SciencesNelson AbaraNo ratings yet
- Mechanical Engineering Research Journal: M E R JDocument5 pagesMechanical Engineering Research Journal: M E R JAntônio Luiz MaiaNo ratings yet
- SSRN 4480660Document6 pagesSSRN 4480660kevinsuyu21No ratings yet
- Analysis of Accelerating and Braking Stability Using Constrained Bifurcation and Continuation MethodsDocument16 pagesAnalysis of Accelerating and Braking Stability Using Constrained Bifurcation and Continuation MethodsAngulumaNo ratings yet
- Yaw Damper Modelling and Its Influence On Railway Dynamic StabilityDocument24 pagesYaw Damper Modelling and Its Influence On Railway Dynamic StabilityainaraNo ratings yet
- Design of An Ackermann Type Steering MechanismDocument15 pagesDesign of An Ackermann Type Steering MechanismIkshwakNo ratings yet
- Lateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingDocument29 pagesLateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingLuong Ngoc MinhNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument24 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityLe Huy HoangNo ratings yet
- Design of An Ackermann Type Steering Mechanism: ArticleDocument15 pagesDesign of An Ackermann Type Steering Mechanism: ArticleKaasamHarishKumarNo ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Dhayou GraphyNo ratings yet
- Babu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060Document10 pagesBabu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1123 012060suresh_501No ratings yet
- Analysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkeDocument6 pagesAnalysis and Optimization of Engine Mounting Bracket: Monali Deshmukh, Prof. K R SontakkehadiNo ratings yet
- Experimental Study of The Dynamic Characteristics of Rubber Mounts For Agricultural Tractor CabinDocument8 pagesExperimental Study of The Dynamic Characteristics of Rubber Mounts For Agricultural Tractor CabinGabriel AguirreNo ratings yet
- Mechanics Based Design of Structures and Machines: An International JournalDocument27 pagesMechanics Based Design of Structures and Machines: An International JournalBajolNo ratings yet
- Dynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleDocument13 pagesDynamics Modeling and Control of Active Track Tensioning System For Tracked VehicleH VNo ratings yet
- Review Paper FINALDocument7 pagesReview Paper FINALPappuNo ratings yet
- Fatigue Analysis and Optimization of Upright of A FSAE VehicleDocument6 pagesFatigue Analysis and Optimization of Upright of A FSAE Vehiclepreetham saiNo ratings yet
- Dong 等 - 2021 - Investigation of the Vibration Features and DynamiDocument15 pagesDong 等 - 2021 - Investigation of the Vibration Features and Dynami王磊No ratings yet
- Braking Performance Analysis of An Escalator System Using Multibody Dynamics Simulation TechnologyDocument7 pagesBraking Performance Analysis of An Escalator System Using Multibody Dynamics Simulation Technologya_salehiNo ratings yet
- Effect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringDocument5 pagesEffect of The Tire Lateral Force Saturation On Stability Control of 4WDEV SteeringBerkay ÇelikNo ratings yet
- Analysis of The Kinematics and Compliance of A PasDocument10 pagesAnalysis of The Kinematics and Compliance of A Paspad abtNo ratings yet
- Outrigger Force Measurefor Mobile Crane Safety Basedon Linear Programming OptimizationDocument28 pagesOutrigger Force Measurefor Mobile Crane Safety Basedon Linear Programming OptimizationThùyNo ratings yet
- IJIRSTV2I11252Document11 pagesIJIRSTV2I11252Vincent RobinsonNo ratings yet
- Dobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034Document11 pagesDobaj 2016 IOP Conf. Ser.: Mater. Sci. Eng. 148 012034pinabarrosNo ratings yet
- Jay A Chandran 2012Document10 pagesJay A Chandran 2012Dragos BotnariNo ratings yet
- Consideration of Suspension Mechanism WithDocument10 pagesConsideration of Suspension Mechanism WithRushik KudaleNo ratings yet
- Irjet V2i7116 PDFDocument8 pagesIrjet V2i7116 PDFSantiago UrgilesNo ratings yet
- 5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemDocument14 pages5.eng Design and Analysis of Helical Springs in Two Wheeler Suspension SystemImpact JournalsNo ratings yet
- Suspension Optimization For Reducing Body RollDocument16 pagesSuspension Optimization For Reducing Body RollJ-56 Krishna p hollaNo ratings yet
- Zhou 2019 IOP Conf. Ser. Mater. Sci. Eng. 538 012068Document18 pagesZhou 2019 IOP Conf. Ser. Mater. Sci. Eng. 538 012068FWEFWEFWNo ratings yet
- Processes 10 00940 v2Document18 pagesProcesses 10 00940 v2allwinkunnathNo ratings yet
- 1990_Vol19_49-70Document23 pages1990_Vol19_49-70Vicente BentoNo ratings yet
- Outrigger Force Measure For Mobile Crane Safety Based On Linear Programming OptimizationDocument28 pagesOutrigger Force Measure For Mobile Crane Safety Based On Linear Programming OptimizationSherlyn Corpuz Cortes-JavelosaNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument5 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityAlberto CarbajalNo ratings yet
- Ijresm V4 I7 100Document9 pagesIjresm V4 I7 100saxadi4814No ratings yet
- Park 1999Document17 pagesPark 1999ricmf89No ratings yet
- Materials 14 03356Document18 pagesMaterials 14 03356dadheganesh29No ratings yet
- STEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemDocument8 pagesSTEERING TORQUE CONTROL USING VARIABLE IMPEDANCE Model For A Steer by Wire SystemCigifarmNo ratings yet
- Wu 2018Document14 pagesWu 2018Rayhan Fajar SatrioNo ratings yet
- MRAC High OrderActuatorDynamicsDocument16 pagesMRAC High OrderActuatorDynamicsKrisdannerNo ratings yet
- An Improved Particle Swarm Optimization AlgorithmDocument11 pagesAn Improved Particle Swarm Optimization AlgorithmOussama AkrmiNo ratings yet
- Turning Ability of A Ship Towing SystemDocument15 pagesTurning Ability of A Ship Towing SystemFerfer BarbarNo ratings yet
- Electrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewDocument7 pagesElectrolytic Conductivity Sensor For Cornering of Two-Wheeler: A ReviewPappuNo ratings yet
- Design Analysis of Automatic Pneumatic Bumpers For 4-Wheelers Subjected To Dynamic AnalysisDocument6 pagesDesign Analysis of Automatic Pneumatic Bumpers For 4-Wheelers Subjected To Dynamic AnalysisFinger igNo ratings yet
- High Performance System Dynamics Simulation of The Entire System Tire-Suspension-Steering-VehicleDocument22 pagesHigh Performance System Dynamics Simulation of The Entire System Tire-Suspension-Steering-VehicleSabajonhsons SmithNo ratings yet
- Symmetry 15 00159Document22 pagesSymmetry 15 00159vishwas peshwaNo ratings yet
- OSEK-1995Document10 pagesOSEK-1995Vicente BentoNo ratings yet
- controle injeção EGO-940972Document15 pagescontrole injeção EGO-940972Vicente BentoNo ratings yet
- Chatter Clutch-pime_proc_1973Document11 pagesChatter Clutch-pime_proc_1973Vicente BentoNo ratings yet
- InjeçãoDireta1998Document13 pagesInjeçãoDireta1998Vicente BentoNo ratings yet
- Air Fuel control- 810494Document18 pagesAir Fuel control- 810494Vicente BentoNo ratings yet
- idle control Hrovat 1997Document8 pagesidle control Hrovat 1997Vicente BentoNo ratings yet
- modal anlysis-understandingDocument11 pagesmodal anlysis-understandingVicente BentoNo ratings yet
- E throtle C-1999Document8 pagesE throtle C-1999Vicente BentoNo ratings yet
- 1990_Vol19_237-253Document18 pages1990_Vol19_237-253Vicente BentoNo ratings yet
- 1990_Vol19_49-70Document23 pages1990_Vol19_49-70Vicente BentoNo ratings yet
- Optimal Control F1Document17 pagesOptimal Control F1Vicente BentoNo ratings yet
- Reports Brochure-Infraline EnergyDocument10 pagesReports Brochure-Infraline EnergyInfraline EnergyNo ratings yet
- Datasheet VatimetroDocument1 pageDatasheet VatimetroMarjorie MulloNo ratings yet
- Steam Blowing Steam Blowing Procedure PDFDocument11 pagesSteam Blowing Steam Blowing Procedure PDFAdelAbdElhamidNo ratings yet
- CD+ 25-260 Product Description EN Antwerp API 146E 46L1 Ed 00Document6 pagesCD+ 25-260 Product Description EN Antwerp API 146E 46L1 Ed 00Jesus MartinezNo ratings yet
- Reaction PaperDocument4 pagesReaction PaperHerjay Racho SulapasNo ratings yet
- Energy Medicine PDFDocument14 pagesEnergy Medicine PDFMonicaNo ratings yet
- Multix PowerDocument68 pagesMultix PowerTessa HernandezNo ratings yet
- CVT and CC - North American BrochureDocument8 pagesCVT and CC - North American Brochurejose dupimNo ratings yet
- Sta 434aDocument3 pagesSta 434aChack RelaxsNo ratings yet
- Micod: Si Detector KVANTDocument2 pagesMicod: Si Detector KVANTDoka OlddokaNo ratings yet
- ABB MV-LV TransformerDocument44 pagesABB MV-LV Transformeryarafat007No ratings yet
- Total Building Solutions For Hospitals: The Next Generation of IntelligenceDocument8 pagesTotal Building Solutions For Hospitals: The Next Generation of Intelligenceابو محمد البصري العراقيNo ratings yet
- Electrical DesignDocument4 pagesElectrical DesignKrishna AdinaNo ratings yet
- Prorox SL 950 SaDocument1 pageProrox SL 950 SaHardiman ArbiNo ratings yet
- Europacable Cable Technology UpdateDocument13 pagesEuropacable Cable Technology UpdateA. HassanNo ratings yet
- Pico Hydro Operational TrainingDocument25 pagesPico Hydro Operational TrainingSandeep JoshiNo ratings yet
- MBRB 2545CT - Diodo SchottkyDocument6 pagesMBRB 2545CT - Diodo SchottkyTiago LeonhardtNo ratings yet
- Jaguar V8-V6 Engine Workshop Manual-352 Pgs.Document352 pagesJaguar V8-V6 Engine Workshop Manual-352 Pgs.David McgregorNo ratings yet
- Objectives: Experiment 6: Study of A Position Control ServomechanismDocument8 pagesObjectives: Experiment 6: Study of A Position Control ServomechanismU V DurgaraoNo ratings yet
- Experiment 1 1Document57 pagesExperiment 1 1Christine Mae VeaNo ratings yet
- Atoms: Chapter TwelveDocument16 pagesAtoms: Chapter TwelveBhoomika VijayakumarNo ratings yet
- Key Notes: Wall SystemDocument1 pageKey Notes: Wall SystemMyo Min ThuNo ratings yet
- Modular Multilevel Converter Control Strategy With Fault ToleranceDocument6 pagesModular Multilevel Converter Control Strategy With Fault TolerancesatyacvaNo ratings yet
- Menurunkan Frekuensi Breakdown Low Power Pada Unit Wa500-3 Komatsu Di PT Kalimantan Prima Persada Site Port Sungai PutingDocument6 pagesMenurunkan Frekuensi Breakdown Low Power Pada Unit Wa500-3 Komatsu Di PT Kalimantan Prima Persada Site Port Sungai PutingPrana Desamba Dela RajaNo ratings yet
- Session 2-2 - Building System - Electrical System ComponentsDocument48 pagesSession 2-2 - Building System - Electrical System ComponentsCeino Rey QuimintanNo ratings yet
- Transformer Vector GroupsDocument17 pagesTransformer Vector GroupsDheeraj YadavNo ratings yet
- Use of Nanomaterials in Cementing ApplicationsDocument0 pagesUse of Nanomaterials in Cementing ApplicationsMobeen MurtazaNo ratings yet
- OpelDocument8 pagesOpelCristi NaNo ratings yet
- Me Gi Gie Pump Vaporizer Unit For LNG and Ethane EngDocument5 pagesMe Gi Gie Pump Vaporizer Unit For LNG and Ethane Engionut nicolaeNo ratings yet