Download as pdf or txt
You might also like
- r33 - Electric DiagramDocument31 pagesr33 - Electric Diagramalex.typexNo ratings yet
- Engineering Optimization Course: Tugas Personal Ke-1 Minggu 02 / Session 03Document6 pagesEngineering Optimization Course: Tugas Personal Ke-1 Minggu 02 / Session 03Sando Andre SimanullangNo ratings yet
- Section 3 Independent PracticeDocument25 pagesSection 3 Independent PracticejazzyNo ratings yet
- Reflection Math1Document3 pagesReflection Math1api-296995969100% (1)
- Path Planning For An Industrial Robotic ArmDocument7 pagesPath Planning For An Industrial Robotic ArmZahid IqbalNo ratings yet
- Robot Control ThesisDocument5 pagesRobot Control Thesisafloaaffbkmmbx100% (1)
- 1 s2.0 S095183202300087X MainDocument19 pages1 s2.0 S095183202300087X Mainjm2001vcNo ratings yet
- Autonomous Indoor Navigation Robot PDFDocument15 pagesAutonomous Indoor Navigation Robot PDFAkshyaNo ratings yet
- 1 s2.0 S0007850624000131 MainDocument4 pages1 s2.0 S0007850624000131 Main975619738No ratings yet
- Multi Robot Path Planning For WarehouseDocument13 pagesMulti Robot Path Planning For WarehouseAnkur BhargavaNo ratings yet
- Robot Simulation and Off-Line Programming: S. F. Chan, Prof. Weston and CaseDocument6 pagesRobot Simulation and Off-Line Programming: S. F. Chan, Prof. Weston and CaseShaw MxNo ratings yet
- An Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Document4 pagesAn Overview-Mobile Robot Path Planning NCETEMT-2021 - Paper - 152Vesag nNo ratings yet
- Sciencedirect: Methodology To Identify Applications For Collaborative Robots in Powertrain AssemblyDocument6 pagesSciencedirect: Methodology To Identify Applications For Collaborative Robots in Powertrain AssemblyDániel TokodyNo ratings yet
- Parallelization of Swarm Intelligence Algorithms: Literature ReviewDocument29 pagesParallelization of Swarm Intelligence Algorithms: Literature ReviewЮрій ДоротякNo ratings yet
- Literature Review For Industrial RobotsDocument6 pagesLiterature Review For Industrial Robotsea7y3197100% (1)
- 1 s2.0 S0278612523000377 MainDocument19 pages1 s2.0 S0278612523000377 MainAlexNicolaeNo ratings yet
- RMASDocument10 pagesRMASwooquiNo ratings yet
- A Simulation Ciclo de AdquisicionesDocument13 pagesA Simulation Ciclo de AdquisicionesHenry AlvarezNo ratings yet
- An Overview of Autonomous Mobile Robot Path Planning AlgorithmsDocument7 pagesAn Overview of Autonomous Mobile Robot Path Planning AlgorithmsWilberFabiánNo ratings yet
- Using Ros For Agricultural Robotics - Design Considerations and ExperiencesDocument10 pagesUsing Ros For Agricultural Robotics - Design Considerations and ExperienceshemanthNo ratings yet
- Path Planning and Obstacle Avoidance Using ROSDocument6 pagesPath Planning and Obstacle Avoidance Using ROSInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Paper Untuk Prop TaDocument6 pagesPaper Untuk Prop TaAhmad Didik SNo ratings yet
- Collaboration RobotsDocument19 pagesCollaboration RobotsMohaman GonzaNo ratings yet
- Introduction To RPDDocument6 pagesIntroduction To RPDAmeya BandekarNo ratings yet
- An Integrated Planning and Programming System For HumanRobotCooperationDocument6 pagesAn Integrated Planning and Programming System For HumanRobotCooperationKarthik SRSNo ratings yet
- Literature Review of Pick and Place RobotDocument4 pagesLiterature Review of Pick and Place Robotgvzf446w100% (1)
- 2016 A Literature Review On Efficient Plant Layout DesignDocument10 pages2016 A Literature Review On Efficient Plant Layout DesignpdzaveriNo ratings yet
- 2014 Schneider RobotikISRDocument8 pages2014 Schneider RobotikISRJavier Baliñas SantosNo ratings yet
- Petrinet - Tutorial PDFDocument17 pagesPetrinet - Tutorial PDFsubramanya1982No ratings yet
- Two Dimensional Airfoil Optimisation Using CFD in A Grid Computing EnvironmentDocument8 pagesTwo Dimensional Airfoil Optimisation Using CFD in A Grid Computing Environmentananth9660No ratings yet
- 49-Optimal Grasping Strategy For Robots With A Parallel Gripper Based On Feature Sensing of 3D Object ModelDocument11 pages49-Optimal Grasping Strategy For Robots With A Parallel Gripper Based On Feature Sensing of 3D Object ModelHaider AliNo ratings yet
- Towards Big Industrial Data Mining Through Explainable Automated Machine LearningDocument20 pagesTowards Big Industrial Data Mining Through Explainable Automated Machine LearningFitraNo ratings yet
- Ece - Ijeceierd - All New 3Document11 pagesEce - Ijeceierd - All New 3global-marketin8184No ratings yet
- Research Paper On Automation in ManufacturingDocument7 pagesResearch Paper On Automation in Manufacturingyqxvxpwhf100% (1)
- Simulation of Spot Welding Robot For Automotive Manufacturing ApplicationDocument14 pagesSimulation of Spot Welding Robot For Automotive Manufacturing ApplicationKARTICK PRASADNo ratings yet
- Robot Simulation and Off-Line Programming: S. F. Chan, Prof. Weston and CaseDocument6 pagesRobot Simulation and Off-Line Programming: S. F. Chan, Prof. Weston and CasedatdrakuNo ratings yet
- Intelligent Scheduling of Discrete Automated Production Line Via Deep Reinforcement LearningDocument21 pagesIntelligent Scheduling of Discrete Automated Production Line Via Deep Reinforcement LearningRicardo KatoNo ratings yet
- Ontology For CAD/CAM Integration: International Journal of Application or Innovation in Engineering & Management (IJAIEM)Document7 pagesOntology For CAD/CAM Integration: International Journal of Application or Innovation in Engineering & Management (IJAIEM)International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Use of Simulation Software Environments For The Purpose of Production OptimizationDocument10 pagesUse of Simulation Software Environments For The Purpose of Production OptimizationpatrickNX9420No ratings yet
- Mobile Manipulation Task Simulation Using Ros With Moveit: Hao Deng, Jing Xiong and Zeyang XiaDocument5 pagesMobile Manipulation Task Simulation Using Ros With Moveit: Hao Deng, Jing Xiong and Zeyang XiaAhmad Didik SNo ratings yet
- A Scalable Synthesis Methodology For Application-Specific ProcessorsDocument14 pagesA Scalable Synthesis Methodology For Application-Specific ProcessorsMurali PadalaNo ratings yet
- Pipelined Processor Farms: Structured Design for Embedded Parallel SystemsFrom EverandPipelined Processor Farms: Structured Design for Embedded Parallel SystemsNo ratings yet
- RDS - Realistic Dynamic Simulation of RobotsDocument16 pagesRDS - Realistic Dynamic Simulation of RobotsstefanantonerNo ratings yet
- Cad Paramtuning SurveyDocument6 pagesCad Paramtuning SurveyJack LuarNo ratings yet
- Trajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmDocument15 pagesTrajectory Optimization Using Learning From Demonstration With Meta-Heuristic Grey Wolf AlgorithmIAES International Journal of Robotics and AutomationNo ratings yet
- (QR Code Paper1)Document6 pages(QR Code Paper1)Muhammed MinhajNo ratings yet
- FPGA Based Haar CascadeDocument11 pagesFPGA Based Haar CascadeRaymondNo ratings yet
- Pub Grid ComputingDocument330 pagesPub Grid ComputingjayNo ratings yet
- An Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerDocument14 pagesAn Online Real-Time Path Compensation System For Industrial Robots Based On Laser TrackerMihail AvramovNo ratings yet
- Intelligent Mobility: Autonomous Outdoor Robotics at The DFKIDocument7 pagesIntelligent Mobility: Autonomous Outdoor Robotics at The DFKIFernando MartinezNo ratings yet
- Robotized Assembly Process Using Dual Arm RobotDocument6 pagesRobotized Assembly Process Using Dual Arm RobotshitalchiddarwarNo ratings yet
- Desarrollo Basado en Modelos de Aplicaciones Intensivas de Datos Sobre Recursos de La NubeDocument32 pagesDesarrollo Basado en Modelos de Aplicaciones Intensivas de Datos Sobre Recursos de La NubeDaniela BaezNo ratings yet
- Applied Sciences: A Smart Parking Solution Architecture Based On Lorawan and KubernetesDocument23 pagesApplied Sciences: A Smart Parking Solution Architecture Based On Lorawan and KubernetesJonnyDeepNo ratings yet
- Applsci 12 05897 v2Document14 pagesApplsci 12 05897 v2Musab AbdoNo ratings yet
- Parametric Configuration and Programming of FlexibDocument17 pagesParametric Configuration and Programming of FlexibTahseen NadafNo ratings yet
- Sensors: Path Planning For Autonomous Mobile Robots: A ReviewDocument29 pagesSensors: Path Planning For Autonomous Mobile Robots: A Review21P410 - VARUN MNo ratings yet
- Anugerah Pakarty - Analisis Perancangan Fasilitas ManufakturDocument2 pagesAnugerah Pakarty - Analisis Perancangan Fasilitas ManufakturAnugerah Norma PakartyNo ratings yet
- Art 20174805Document11 pagesArt 20174805aymenNo ratings yet
- B - KhanUmer (Plagiarism)Document17 pagesB - KhanUmer (Plagiarism)M shayan JavedNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Efficient Surface Detection For Assisting Collaborative RobotsDocument7 pagesEfficient Surface Detection For Assisting Collaborative RobotsWilson NúñezNo ratings yet
- Code Reusability Tools For Programming Mobile RobotsDocument6 pagesCode Reusability Tools For Programming Mobile RobotsyashidhingraNo ratings yet
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- A-Design-Strategy-Based-on-Topology-Optimization-Techniques-_2017_Procedia-MDocument9 pagesA-Design-Strategy-Based-on-Topology-Optimization-Techniques-_2017_Procedia-Mwfy458nj92No ratings yet
- Automated guided vehicles with a mounted serial manipulator- A systematic literature reviewDocument27 pagesAutomated guided vehicles with a mounted serial manipulator- A systematic literature reviewwfy458nj92No ratings yet
- Implementation of Automated Guided Vehicles for the Automation of Selected Processes and Elimination of Collisions between Handling Equipment and Humans in the WarehouseDocument19 pagesImplementation of Automated Guided Vehicles for the Automation of Selected Processes and Elimination of Collisions between Handling Equipment and Humans in the Warehousewfy458nj92No ratings yet
- Investigating automation and AGV in healthcare logistics- a case study based approachDocument22 pagesInvestigating automation and AGV in healthcare logistics- a case study based approachwfy458nj92No ratings yet
- Cheng_2021_J._Phys.%3A_Conf._Ser._1884_012037Document10 pagesCheng_2021_J._Phys.%3A_Conf._Ser._1884_012037wfy458nj92No ratings yet
- M1 Booklet - Grade 10-1 PDFDocument96 pagesM1 Booklet - Grade 10-1 PDFHashim ManhalNo ratings yet
- 8500c 2985Document2 pages8500c 2985Adel Khelifi100% (1)
- Class Notes EMG 2404Document75 pagesClass Notes EMG 2404yassinNo ratings yet
- Maquinaria Naval Parte A-DDocument185 pagesMaquinaria Naval Parte A-DraulbrlunaNo ratings yet
- How To Achieve Speed in Maths Calculations PDFDocument6 pagesHow To Achieve Speed in Maths Calculations PDFAnonymous 9Yv6n5qvSNo ratings yet
- Difference Between RAM and ROMDocument7 pagesDifference Between RAM and ROMJan Carlo Balatan Pablo100% (2)
- Integrated Total Dietary Fiber (K-Intdf) - MegazymeDocument24 pagesIntegrated Total Dietary Fiber (K-Intdf) - MegazymegonbioNo ratings yet
- Introduction To Experimental Archaeology - Outram PDFDocument7 pagesIntroduction To Experimental Archaeology - Outram PDFDasRakeshKumarDasNo ratings yet
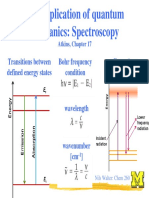
- The Application of Quantum Mechanics: SpectrosDocument7 pagesThe Application of Quantum Mechanics: SpectrosRa saNo ratings yet
- THUNDERDRIVE Series ENDocument1 pageTHUNDERDRIVE Series ENbaneaciprianNo ratings yet
- A Priori Bealer (1999) PDFDocument27 pagesA Priori Bealer (1999) PDFDiego MontoyaNo ratings yet
- Textbook Applied Nanophotonics Sergey V Gaponenko Ebook All Chapter PDFDocument53 pagesTextbook Applied Nanophotonics Sergey V Gaponenko Ebook All Chapter PDFsara.gleim919100% (19)
- FIDES BearingCapacityDocument29 pagesFIDES BearingCapacitystingu.emanuelNo ratings yet
- In Defense of Anselm's Ontological ArgumentDocument6 pagesIn Defense of Anselm's Ontological Argumenttarun singhNo ratings yet
- NEW IT Acknowledgement Form - Workstation - User Acceptance Form V2.0 - LOKDocument1 pageNEW IT Acknowledgement Form - Workstation - User Acceptance Form V2.0 - LOKArisha Rania EnterpriseNo ratings yet
- Microstation V8 2004 Edition: Pattern/Graphics IssueDocument7 pagesMicrostation V8 2004 Edition: Pattern/Graphics IssueGeorgeman LópezNo ratings yet
- Computation of Abutment Scour Using HEC-18 Equations SpreadsheetDocument7 pagesComputation of Abutment Scour Using HEC-18 Equations SpreadsheetAfolabi OladunniNo ratings yet
- C748938 PDFDocument24 pagesC748938 PDFAkhmad SebehNo ratings yet
- General Apendice7Document4 pagesGeneral Apendice7jesusgomNo ratings yet
- Stress BreakersDocument7 pagesStress BreakerssavyasachinNo ratings yet
- Elsherbeni The FinThe Finite-Difference Time-Domain Method For Electromagnetics With MATLAB R Simulationsite Difference@MATLABDocument453 pagesElsherbeni The FinThe Finite-Difference Time-Domain Method For Electromagnetics With MATLAB R Simulationsite Difference@MATLABmosaeed100% (6)
- AC TO DC CONVERTERS Paper 1 PDFDocument3 pagesAC TO DC CONVERTERS Paper 1 PDFDonigoNo ratings yet
- 1.7 Combining Like Terms & Distrib PropDocument2 pages1.7 Combining Like Terms & Distrib PropJackNo ratings yet
- High-Input Voltage, Adjustable, 3-Terminal, Linear RegulatorDocument19 pagesHigh-Input Voltage, Adjustable, 3-Terminal, Linear Regulatormarlon corpuzNo ratings yet
- Power Plant Labelling Sytem (KKS Numbering Code)Document21 pagesPower Plant Labelling Sytem (KKS Numbering Code)masoodae50% (2)
- NEMA 23 Stats OtherDocument5 pagesNEMA 23 Stats OtherHasnain TariqNo ratings yet