
laplaceb
laplaceb
You might also like
- Ebook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFDocument67 pagesEbook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFsamuel.chapman41697% (38)
- John Carroll University Magazine Spring 2012Document54 pagesJohn Carroll University Magazine Spring 2012johncarrolluniversityNo ratings yet
- Module 4A Inverse Laplace Transform PDFDocument5 pagesModule 4A Inverse Laplace Transform PDFPaolo Angelo GutierrezNo ratings yet
- Inverse Laplace Transforms FormuleaDocument2 pagesInverse Laplace Transforms FormuleaBala BalajiNo ratings yet
- Iot AssiDocument8 pagesIot AssilvrevathiNo ratings yet
- Inverse Laplace TransformsDocument4 pagesInverse Laplace TransformsNavya JainNo ratings yet
- Laplace PDFDocument4 pagesLaplace PDFDynaNo ratings yet
- 4-Inverse Laplace TransformsDocument25 pages4-Inverse Laplace TransformsADITYA THAKURNo ratings yet
- Lecture 15 Invrse LTDocument5 pagesLecture 15 Invrse LTdev.user.1792No ratings yet
- 18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsDocument3 pages18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsMelindaNo ratings yet
- Lecture 15 MMP-IIDocument4 pagesLecture 15 MMP-IISharmeen IqrazNo ratings yet
- Laplace Transforms and Inverse Laplace Important PDFDocument3 pagesLaplace Transforms and Inverse Laplace Important PDFAnandNo ratings yet
- Laplace Lec AnoDocument61 pagesLaplace Lec AnoJoe MullerNo ratings yet
- Unit 8 Inverse Laplace TransformsDocument34 pagesUnit 8 Inverse Laplace TransformsRaghuNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Oz Sertoz@fen - Bilkent.edu - TR 11 April 2003Document34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Oz Sertoz@fen - Bilkent.edu - TR 11 April 2003SuptryNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzDocument34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzMarcelo LimaNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzDocument34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Ozjohn sybeloNo ratings yet
- GOOD - Initial Value Problems and The LaplaceDocument7 pagesGOOD - Initial Value Problems and The LaplaceBelay AyalewNo ratings yet
- Initial Value Problems and The Laplace TransformDocument7 pagesInitial Value Problems and The Laplace TransformKeith GarridoNo ratings yet
- Mathematical Models of Physical SystemsDocument44 pagesMathematical Models of Physical Systemspersian_prideNo ratings yet
- Inverse Laplace TransormDocument12 pagesInverse Laplace Transormchiranthan123456789No ratings yet
- Boyce ODEch 6 S 4 P 04Document3 pagesBoyce ODEch 6 S 4 P 04Feby ArdhaniNo ratings yet
- Module 4 Lecture 5 Inverse Laplace TransformsDocument5 pagesModule 4 Lecture 5 Inverse Laplace TransformsJan Zander PeñasNo ratings yet
- Test 2Document3 pagesTest 2howard-chan-3022No ratings yet
- Lecture 20Document12 pagesLecture 20RakshitTiwariNo ratings yet
- Unit IV Applications of Laplace Transform PDFDocument43 pagesUnit IV Applications of Laplace Transform PDFSanjay KumarNo ratings yet
- ELEN90055 Control Systems: Worksheet 2 - Solutions To Starred ProblemsDocument4 pagesELEN90055 Control Systems: Worksheet 2 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- 141021transformation of Initial Value ProblemDocument5 pages141021transformation of Initial Value Problemaye pyoneNo ratings yet
- Inverse Laplace TransformsDocument5 pagesInverse Laplace TransformsNavya JainNo ratings yet
- IPC - Lectures 16-18 (Laplace Transform)Document16 pagesIPC - Lectures 16-18 (Laplace Transform)Hafsa ImranNo ratings yet
- Math 202 PS-10Document12 pagesMath 202 PS-10asdasdasdNo ratings yet
- Inverse Laplace TransformsDocument5 pagesInverse Laplace TransformsNavya JainNo ratings yet
- Math2065: Intro To Pdes Tutorial Solutions (Week 3)Document3 pagesMath2065: Intro To Pdes Tutorial Solutions (Week 3)TOM DAVISNo ratings yet
- EMT Solution ManualDocument4 pagesEMT Solution Manualatra450No ratings yet
- Chapter 7-The Laplace Transform - Part 2Document27 pagesChapter 7-The Laplace Transform - Part 2Mohammed Al-OdatNo ratings yet
- MATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2Document2 pagesMATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2John ChanNo ratings yet
- Laplace Transform Lecture NotesDocument44 pagesLaplace Transform Lecture NotesAmpumuza MmukundaNo ratings yet
- M 307 Laplace Fact SheetDocument3 pagesM 307 Laplace Fact Sheetstephannie montoyaNo ratings yet
- Solution Methods: Laplace Transform and Series Solutions of OdesDocument24 pagesSolution Methods: Laplace Transform and Series Solutions of OdesAbi DemNo ratings yet
- Assignment10 SolutionsDocument21 pagesAssignment10 SolutionsSudheer AlodiyaNo ratings yet
- Inverse Laplace TransformDocument26 pagesInverse Laplace TransformIñigo SorianoNo ratings yet
- Math198 - Solution Sheet 5Document2 pagesMath198 - Solution Sheet 5William MukindNo ratings yet
- Solutions To HW 11Document3 pagesSolutions To HW 11Saul Fernando Cujaban AceroNo ratings yet
- Module3-Tutorial Sheet-DET-BMAT102LDocument3 pagesModule3-Tutorial Sheet-DET-BMAT102LashishtiwarypcNo ratings yet
- Laplace Transform - Tutorial PDFDocument2 pagesLaplace Transform - Tutorial PDFShreyansh ShethNo ratings yet
- Calculo III-9Document18 pagesCalculo III-9Roy Brayam Gomez pradoNo ratings yet
- Solution Assignment 2Document7 pagesSolution Assignment 2sushant sharmaNo ratings yet
- ME416 Module-2 Laplace-TransformDocument20 pagesME416 Module-2 Laplace-TransformMiranda Paul J.No ratings yet
- Assignment # 2 (Solution) Exercise 4.4: F T F T FDocument4 pagesAssignment # 2 (Solution) Exercise 4.4: F T F T FGeorge KNo ratings yet
- Tranformada LaplaceDocument52 pagesTranformada LaplaceLuis JimenezNo ratings yet
- Questao de Inversa de LaplaceDocument3 pagesQuestao de Inversa de LaplaceAna ValenteNo ratings yet
- Module 4 - Solution of Initial Value Problem by Laplace TransformDocument7 pagesModule 4 - Solution of Initial Value Problem by Laplace TransformParth VijayNo ratings yet
- Exam II Laplace Transforms Make-Up Exam SolutionsDocument3 pagesExam II Laplace Transforms Make-Up Exam SolutionsHelbert PaatNo ratings yet
- Resolvido Ch12-214718Document32 pagesResolvido Ch12-214718Caio FurieriNo ratings yet
- Laplace TransformsDocument65 pagesLaplace Transformsryan sendegeNo ratings yet
- Boyce ODEch 6 S 5 P 02Document2 pagesBoyce ODEch 6 S 5 P 02Feby ArdhaniNo ratings yet
- Tutorial Sheet 3Document2 pagesTutorial Sheet 3yash sononeNo ratings yet
- LaplacetransDocument8 pagesLaplacetransAnonymous OrhjVLXO5sNo ratings yet
- Applications of Laplace TransformsDocument11 pagesApplications of Laplace Transformswealthyjaneabletes12No ratings yet
- AM-II_module2_ Laplace Transform L-5Document10 pagesAM-II_module2_ Laplace Transform L-5Nscb BoseNo ratings yet
- ILT (1) Lecture 5Document13 pagesILT (1) Lecture 5Hasibur RahmanNo ratings yet
- Sustainability 10 02443Document19 pagesSustainability 10 02443mercyella prasetyaNo ratings yet
- Leading Workplace CommunicationDocument26 pagesLeading Workplace CommunicationEahbm KaduNo ratings yet
- (Adi Kuntsman (Eds.) ) Selfie CitizenshipDocument169 pages(Adi Kuntsman (Eds.) ) Selfie CitizenshipUğur GündüzNo ratings yet
- Amalgam Xray PorcelainDocument58 pagesAmalgam Xray PorcelainczarinaNo ratings yet
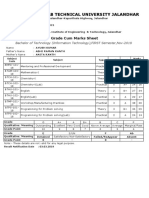
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- Flood Control Design2Document51 pagesFlood Control Design2Abo MarvinNo ratings yet
- T.I.M.E. European Summer School June 27 To July 9, 2011: Ustainability ConomicsDocument4 pagesT.I.M.E. European Summer School June 27 To July 9, 2011: Ustainability ConomicsalpalpalpalpNo ratings yet
- Smart Book Reader For Visual Impairment Person Using Iot DeviceDocument6 pagesSmart Book Reader For Visual Impairment Person Using Iot Devicekomal ziaNo ratings yet
- CVE 3rd PTDocument4 pagesCVE 3rd PTAlexa AustriaNo ratings yet
- Siemes (SAMA Standard)Document6 pagesSiemes (SAMA Standard)Cristian RomeroNo ratings yet
- Learning Module 1 Computer 7 Quarter 1Document8 pagesLearning Module 1 Computer 7 Quarter 1Rowmil Mariano PerueloNo ratings yet
- TRA 02 Lifting of Skid Units During Rig MovesDocument3 pagesTRA 02 Lifting of Skid Units During Rig MovesPirlo PoloNo ratings yet
- A Astronom As EsDocument40 pagesA Astronom As EsareianoarNo ratings yet
- AI-Ghazali On Logical Necessity, Causality, and MiraclesDocument16 pagesAI-Ghazali On Logical Necessity, Causality, and Miraclespll01No ratings yet
- 3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundDocument10 pages3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundTimos PapadopoulosNo ratings yet
- LogDocument46 pagesLogmas galihNo ratings yet
- Estonian Foreign Intelligence Service Annual Report - 2020Document82 pagesEstonian Foreign Intelligence Service Annual Report - 2020Silviu TanaseNo ratings yet
- A Robust Optimal Zero-Watermarking Technique For Secret Watermark SharingDocument12 pagesA Robust Optimal Zero-Watermarking Technique For Secret Watermark SharingzaidsaebNo ratings yet
- Group Work 1957 and On: Professional Knowledge and Practice Theory Extended at Adelphi School of Social WorkDocument8 pagesGroup Work 1957 and On: Professional Knowledge and Practice Theory Extended at Adelphi School of Social WorkgheljoshNo ratings yet
- What Is Pesonet?: Frequently Asked Questions OnDocument4 pagesWhat Is Pesonet?: Frequently Asked Questions OnJackNo ratings yet
- ENGLISH 9 DLP For DEMODocument9 pagesENGLISH 9 DLP For DEMOMary Joy Corpuz100% (2)
- Literature Review of The Job SatisfactionDocument3 pagesLiterature Review of The Job SatisfactionsuryaNo ratings yet
- cmsc420 Fall2020 LectsDocument156 pagescmsc420 Fall2020 LectsAnthony-Dimitri ANo ratings yet
- Porter's Generic Strategies: Cost Leadership DifferentiationDocument5 pagesPorter's Generic Strategies: Cost Leadership DifferentiationbiswasjoyNo ratings yet
- Bockman, Johanna (2013) NeoliberalismDocument3 pagesBockman, Johanna (2013) NeoliberalismJosh VeigaNo ratings yet
- Performance TaskDocument6 pagesPerformance TaskPrinces Aliesa Bulanadi100% (1)
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- B787 MmelDocument215 pagesB787 Mmeljoker hotNo ratings yet

























































































Download as pdf or txt
You might also like
- Ebook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFDocument67 pagesEbook Strategic Management Competitiveness and Globalization Concepts and Cases 14E PDF Full Chapter PDFsamuel.chapman41697% (38)
- John Carroll University Magazine Spring 2012Document54 pagesJohn Carroll University Magazine Spring 2012johncarrolluniversityNo ratings yet
- Module 4A Inverse Laplace Transform PDFDocument5 pagesModule 4A Inverse Laplace Transform PDFPaolo Angelo GutierrezNo ratings yet
- Inverse Laplace Transforms FormuleaDocument2 pagesInverse Laplace Transforms FormuleaBala BalajiNo ratings yet
- Iot AssiDocument8 pagesIot AssilvrevathiNo ratings yet
- Inverse Laplace TransformsDocument4 pagesInverse Laplace TransformsNavya JainNo ratings yet
- Laplace PDFDocument4 pagesLaplace PDFDynaNo ratings yet
- 4-Inverse Laplace TransformsDocument25 pages4-Inverse Laplace TransformsADITYA THAKURNo ratings yet
- Lecture 15 Invrse LTDocument5 pagesLecture 15 Invrse LTdev.user.1792No ratings yet
- 18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsDocument3 pages18.04 Practice Problems Laplace Transform, Spring 2018 SolutionsMelindaNo ratings yet
- Lecture 15 MMP-IIDocument4 pagesLecture 15 MMP-IISharmeen IqrazNo ratings yet
- Laplace Transforms and Inverse Laplace Important PDFDocument3 pagesLaplace Transforms and Inverse Laplace Important PDFAnandNo ratings yet
- Laplace Lec AnoDocument61 pagesLaplace Lec AnoJoe MullerNo ratings yet
- Unit 8 Inverse Laplace TransformsDocument34 pagesUnit 8 Inverse Laplace TransformsRaghuNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Oz Sertoz@fen - Bilkent.edu - TR 11 April 2003Document34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Oz Sertoz@fen - Bilkent.edu - TR 11 April 2003SuptryNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzDocument34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzMarcelo LimaNo ratings yet
- Lecture Notes On Laplace and Z-Transforms: Ali Sinan Sert OzDocument34 pagesLecture Notes On Laplace and Z-Transforms: Ali Sinan Sert Ozjohn sybeloNo ratings yet
- GOOD - Initial Value Problems and The LaplaceDocument7 pagesGOOD - Initial Value Problems and The LaplaceBelay AyalewNo ratings yet
- Initial Value Problems and The Laplace TransformDocument7 pagesInitial Value Problems and The Laplace TransformKeith GarridoNo ratings yet
- Mathematical Models of Physical SystemsDocument44 pagesMathematical Models of Physical Systemspersian_prideNo ratings yet
- Inverse Laplace TransormDocument12 pagesInverse Laplace Transormchiranthan123456789No ratings yet
- Boyce ODEch 6 S 4 P 04Document3 pagesBoyce ODEch 6 S 4 P 04Feby ArdhaniNo ratings yet
- Module 4 Lecture 5 Inverse Laplace TransformsDocument5 pagesModule 4 Lecture 5 Inverse Laplace TransformsJan Zander PeñasNo ratings yet
- Test 2Document3 pagesTest 2howard-chan-3022No ratings yet
- Lecture 20Document12 pagesLecture 20RakshitTiwariNo ratings yet
- Unit IV Applications of Laplace Transform PDFDocument43 pagesUnit IV Applications of Laplace Transform PDFSanjay KumarNo ratings yet
- ELEN90055 Control Systems: Worksheet 2 - Solutions To Starred ProblemsDocument4 pagesELEN90055 Control Systems: Worksheet 2 - Solutions To Starred ProblemsMingyue WangNo ratings yet
- 141021transformation of Initial Value ProblemDocument5 pages141021transformation of Initial Value Problemaye pyoneNo ratings yet
- Inverse Laplace TransformsDocument5 pagesInverse Laplace TransformsNavya JainNo ratings yet
- IPC - Lectures 16-18 (Laplace Transform)Document16 pagesIPC - Lectures 16-18 (Laplace Transform)Hafsa ImranNo ratings yet
- Math 202 PS-10Document12 pagesMath 202 PS-10asdasdasdNo ratings yet
- Inverse Laplace TransformsDocument5 pagesInverse Laplace TransformsNavya JainNo ratings yet
- Math2065: Intro To Pdes Tutorial Solutions (Week 3)Document3 pagesMath2065: Intro To Pdes Tutorial Solutions (Week 3)TOM DAVISNo ratings yet
- EMT Solution ManualDocument4 pagesEMT Solution Manualatra450No ratings yet
- Chapter 7-The Laplace Transform - Part 2Document27 pagesChapter 7-The Laplace Transform - Part 2Mohammed Al-OdatNo ratings yet
- MATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2Document2 pagesMATH2352 Differential Equations and Applications Name: Coursework 5 ID: Problem 1. Find The Laplace Transform of The Function F (T) 0 T 2 (T 2) T 2John ChanNo ratings yet
- Laplace Transform Lecture NotesDocument44 pagesLaplace Transform Lecture NotesAmpumuza MmukundaNo ratings yet
- M 307 Laplace Fact SheetDocument3 pagesM 307 Laplace Fact Sheetstephannie montoyaNo ratings yet
- Solution Methods: Laplace Transform and Series Solutions of OdesDocument24 pagesSolution Methods: Laplace Transform and Series Solutions of OdesAbi DemNo ratings yet
- Assignment10 SolutionsDocument21 pagesAssignment10 SolutionsSudheer AlodiyaNo ratings yet
- Inverse Laplace TransformDocument26 pagesInverse Laplace TransformIñigo SorianoNo ratings yet
- Math198 - Solution Sheet 5Document2 pagesMath198 - Solution Sheet 5William MukindNo ratings yet
- Solutions To HW 11Document3 pagesSolutions To HW 11Saul Fernando Cujaban AceroNo ratings yet
- Module3-Tutorial Sheet-DET-BMAT102LDocument3 pagesModule3-Tutorial Sheet-DET-BMAT102LashishtiwarypcNo ratings yet
- Laplace Transform - Tutorial PDFDocument2 pagesLaplace Transform - Tutorial PDFShreyansh ShethNo ratings yet
- Calculo III-9Document18 pagesCalculo III-9Roy Brayam Gomez pradoNo ratings yet
- Solution Assignment 2Document7 pagesSolution Assignment 2sushant sharmaNo ratings yet
- ME416 Module-2 Laplace-TransformDocument20 pagesME416 Module-2 Laplace-TransformMiranda Paul J.No ratings yet
- Assignment # 2 (Solution) Exercise 4.4: F T F T FDocument4 pagesAssignment # 2 (Solution) Exercise 4.4: F T F T FGeorge KNo ratings yet
- Tranformada LaplaceDocument52 pagesTranformada LaplaceLuis JimenezNo ratings yet
- Questao de Inversa de LaplaceDocument3 pagesQuestao de Inversa de LaplaceAna ValenteNo ratings yet
- Module 4 - Solution of Initial Value Problem by Laplace TransformDocument7 pagesModule 4 - Solution of Initial Value Problem by Laplace TransformParth VijayNo ratings yet
- Exam II Laplace Transforms Make-Up Exam SolutionsDocument3 pagesExam II Laplace Transforms Make-Up Exam SolutionsHelbert PaatNo ratings yet
- Resolvido Ch12-214718Document32 pagesResolvido Ch12-214718Caio FurieriNo ratings yet
- Laplace TransformsDocument65 pagesLaplace Transformsryan sendegeNo ratings yet
- Boyce ODEch 6 S 5 P 02Document2 pagesBoyce ODEch 6 S 5 P 02Feby ArdhaniNo ratings yet
- Tutorial Sheet 3Document2 pagesTutorial Sheet 3yash sononeNo ratings yet
- LaplacetransDocument8 pagesLaplacetransAnonymous OrhjVLXO5sNo ratings yet
- Applications of Laplace TransformsDocument11 pagesApplications of Laplace Transformswealthyjaneabletes12No ratings yet
- AM-II_module2_ Laplace Transform L-5Document10 pagesAM-II_module2_ Laplace Transform L-5Nscb BoseNo ratings yet
- ILT (1) Lecture 5Document13 pagesILT (1) Lecture 5Hasibur RahmanNo ratings yet
- Sustainability 10 02443Document19 pagesSustainability 10 02443mercyella prasetyaNo ratings yet
- Leading Workplace CommunicationDocument26 pagesLeading Workplace CommunicationEahbm KaduNo ratings yet
- (Adi Kuntsman (Eds.) ) Selfie CitizenshipDocument169 pages(Adi Kuntsman (Eds.) ) Selfie CitizenshipUğur GündüzNo ratings yet
- Amalgam Xray PorcelainDocument58 pagesAmalgam Xray PorcelainczarinaNo ratings yet
- I.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetDocument1 pageI.K.Gujral Punjab Technical University Jalandhar: Grade Cum Marks SheetAyush KumarNo ratings yet
- Flood Control Design2Document51 pagesFlood Control Design2Abo MarvinNo ratings yet
- T.I.M.E. European Summer School June 27 To July 9, 2011: Ustainability ConomicsDocument4 pagesT.I.M.E. European Summer School June 27 To July 9, 2011: Ustainability ConomicsalpalpalpalpNo ratings yet
- Smart Book Reader For Visual Impairment Person Using Iot DeviceDocument6 pagesSmart Book Reader For Visual Impairment Person Using Iot Devicekomal ziaNo ratings yet
- CVE 3rd PTDocument4 pagesCVE 3rd PTAlexa AustriaNo ratings yet
- Siemes (SAMA Standard)Document6 pagesSiemes (SAMA Standard)Cristian RomeroNo ratings yet
- Learning Module 1 Computer 7 Quarter 1Document8 pagesLearning Module 1 Computer 7 Quarter 1Rowmil Mariano PerueloNo ratings yet
- TRA 02 Lifting of Skid Units During Rig MovesDocument3 pagesTRA 02 Lifting of Skid Units During Rig MovesPirlo PoloNo ratings yet
- A Astronom As EsDocument40 pagesA Astronom As EsareianoarNo ratings yet
- AI-Ghazali On Logical Necessity, Causality, and MiraclesDocument16 pagesAI-Ghazali On Logical Necessity, Causality, and Miraclespll01No ratings yet
- 3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundDocument10 pages3.4 Two-Band Interpolation: Papers Motion-Tracked Binaural SoundTimos PapadopoulosNo ratings yet
- LogDocument46 pagesLogmas galihNo ratings yet
- Estonian Foreign Intelligence Service Annual Report - 2020Document82 pagesEstonian Foreign Intelligence Service Annual Report - 2020Silviu TanaseNo ratings yet
- A Robust Optimal Zero-Watermarking Technique For Secret Watermark SharingDocument12 pagesA Robust Optimal Zero-Watermarking Technique For Secret Watermark SharingzaidsaebNo ratings yet
- Group Work 1957 and On: Professional Knowledge and Practice Theory Extended at Adelphi School of Social WorkDocument8 pagesGroup Work 1957 and On: Professional Knowledge and Practice Theory Extended at Adelphi School of Social WorkgheljoshNo ratings yet
- What Is Pesonet?: Frequently Asked Questions OnDocument4 pagesWhat Is Pesonet?: Frequently Asked Questions OnJackNo ratings yet
- ENGLISH 9 DLP For DEMODocument9 pagesENGLISH 9 DLP For DEMOMary Joy Corpuz100% (2)
- Literature Review of The Job SatisfactionDocument3 pagesLiterature Review of The Job SatisfactionsuryaNo ratings yet
- cmsc420 Fall2020 LectsDocument156 pagescmsc420 Fall2020 LectsAnthony-Dimitri ANo ratings yet
- Porter's Generic Strategies: Cost Leadership DifferentiationDocument5 pagesPorter's Generic Strategies: Cost Leadership DifferentiationbiswasjoyNo ratings yet
- Bockman, Johanna (2013) NeoliberalismDocument3 pagesBockman, Johanna (2013) NeoliberalismJosh VeigaNo ratings yet
- Performance TaskDocument6 pagesPerformance TaskPrinces Aliesa Bulanadi100% (1)
- Aditya Vikram Verma - CVDocument2 pagesAditya Vikram Verma - CVAdityaVikramVermaNo ratings yet
- B787 MmelDocument215 pagesB787 Mmeljoker hotNo ratings yet