
Linear Systems HW #1 2021
Linear Systems HW #1 2021
You might also like
- User's Guide: RF Toolbox™Document786 pagesUser's Guide: RF Toolbox™Amardeep KumarNo ratings yet
- (WWW - Entrance-Exam - Net) - IETE AMIETE ET-CS-IT (Old Scheme) Signals and Systems Sample Paper 1Document4 pages(WWW - Entrance-Exam - Net) - IETE AMIETE ET-CS-IT (Old Scheme) Signals and Systems Sample Paper 1Jonas ParreñoNo ratings yet
- Ejercicios DSCDocument39 pagesEjercicios DSCFreyley LeyvaNo ratings yet
- Automatic Control - ExercisesDocument140 pagesAutomatic Control - Exerciseshasan bishNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- 2019 F Midterm SolnDocument16 pages2019 F Midterm SolnaesakipNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- RT Exercises and Solutions Med TentatalDocument264 pagesRT Exercises and Solutions Med TentatalSANA100% (1)
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanNo ratings yet
- 1731250280907_Assignment 1_mergedDocument4 pages1731250280907_Assignment 1_mergedilovejeevan64No ratings yet
- EEF467 Tutorial Sheet 2Document4 pagesEEF467 Tutorial Sheet 2NK-NGAMNo ratings yet
- X X X X X: Sinh Lim Sin Cos 1 2 1 2 1 3Document11 pagesX X X X X: Sinh Lim Sin Cos 1 2 1 2 1 3Chavan ShendeNo ratings yet
- 3C5 Exam 2019Document12 pages3C5 Exam 2019kotagoNo ratings yet
- DSC Exercises PDFDocument37 pagesDSC Exercises PDFsamielmadssiaNo ratings yet
- Exam RT2 2015 SummerDocument7 pagesExam RT2 2015 SummerLuis CarvalhoNo ratings yet
- 2019 Spring Final SolutionDocument13 pages2019 Spring Final Solutionyulin linNo ratings yet
- #QF604 MCQ Practice Test 5Document4 pages#QF604 MCQ Practice Test 5johnnylou592No ratings yet
- Tutorial Sheet 1 Control SystemsDocument7 pagesTutorial Sheet 1 Control SystemsrushilrmalodeNo ratings yet
- U I (UIU) : Expt. No. 2 M SDocument15 pagesU I (UIU) : Expt. No. 2 M SMaksud SarkerNo ratings yet
- GATE Me 1991Document13 pagesGATE Me 1991XADA YADANo ratings yet
- 2009 MergedDocument12 pages2009 Mergedomarlotfy455No ratings yet
- EC Signals and SystemsDocument48 pagesEC Signals and SystemsJeeva KeshavNo ratings yet
- 2020春季期末考解答Document11 pages2020春季期末考解答yulin linNo ratings yet
- ECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thDocument2 pagesECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thsolteanNo ratings yet
- IIT JAM Physics 2006 PaperDocument9 pagesIIT JAM Physics 2006 Papertestseries.quantaNo ratings yet
- Signal and System6 PDFDocument23 pagesSignal and System6 PDFVikas Singh100% (1)
- Nodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsDocument29 pagesNodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsramlakhanNo ratings yet
- Nodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsDocument29 pagesNodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsramlakhanNo ratings yet
- EE - SIGNALS and SYSTEMS PDFDocument29 pagesEE - SIGNALS and SYSTEMS PDFramlakhanNo ratings yet
- Project Fall2015Document5 pagesProject Fall2015AlvinNo ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Assignment 2Document2 pagesAssignment 2Anirban HomroyNo ratings yet
- Exsheet 1Document4 pagesExsheet 1pobisas812No ratings yet
- Handout 4: Circle and Popov Criteria: Linear SystemDocument9 pagesHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNo ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Practice Questions For 336, v1.4: Part 1Document20 pagesPractice Questions For 336, v1.4: Part 1H Aries OñaNo ratings yet
- LTIDocument67 pagesLTIElectron FlowNo ratings yet
- 2A1G Partial Differential EquationsDocument6 pages2A1G Partial Differential EquationsJohn HowardNo ratings yet
- RG CW 14Document7 pagesRG CW 14Roy VeseyNo ratings yet
- Problem Set 3Document6 pagesProblem Set 3VASANTHKUMAR M SNo ratings yet
- Screenshot 2022-10-12 at 2.44.25 PMDocument6 pagesScreenshot 2022-10-12 at 2.44.25 PMً ًNo ratings yet
- Systems and Control PDFDocument9 pagesSystems and Control PDFHamid Farhan0% (1)
- S - S Final Paper 1Document3 pagesS - S Final Paper 1SumitNo ratings yet
- IIT-JAM 2020 SolutionDocument29 pagesIIT-JAM 2020 SolutionGuru prasad BiswalNo ratings yet
- Gate - in 2007Document30 pagesGate - in 2007prabhjot singh1No ratings yet
- Iit Jam Physics 2015Document10 pagesIit Jam Physics 2015Subha NayakNo ratings yet
- Klausur 2021Document7 pagesKlausur 2021AngelaNo ratings yet
- Tute 2Document2 pagesTute 2isiwaraumayangaNo ratings yet
- GhantaDocument15 pagesGhantarwehjgrebgNo ratings yet
- Final 2017-SpringDocument10 pagesFinal 2017-Springyulin linNo ratings yet
- Iit Jam Physics 2008Document5 pagesIit Jam Physics 2008s_adhyaNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- MIT2 087F14 PracFinaexamv4Document6 pagesMIT2 087F14 PracFinaexamv4Carolina RibeiroNo ratings yet
- Exercises PrintDocument124 pagesExercises Printusr_kotoNo ratings yet
- IES Electrical Engineering Previous Year Question Paper 2000 Paper 1 PDFDocument17 pagesIES Electrical Engineering Previous Year Question Paper 2000 Paper 1 PDFkoinsuriNo ratings yet
- 201702070515035Document8 pages201702070515035incandescentglow96No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- M1Report Sapiandante 24Document6 pagesM1Report Sapiandante 24Goran SapiandanteNo ratings yet
- An Introduction To The Laplace Transform and The Z Transform - Anthony C.grove (PH 1991 138s)Document140 pagesAn Introduction To The Laplace Transform and The Z Transform - Anthony C.grove (PH 1991 138s)Cleyton RambaldiNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- Electronics and Communication Ece Formula Book For Gate Ies and PsuDocument56 pagesElectronics and Communication Ece Formula Book For Gate Ies and PsuThomas James88% (16)
- Syllabus of Jntu IV - I Psoc 08 Batch R 07Document2 pagesSyllabus of Jntu IV - I Psoc 08 Batch R 07Krishna Prasad100% (1)
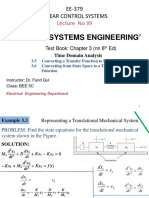
- 8-Lecture 39 TF To SS and SS To TF ConversionDocument18 pages8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanNo ratings yet
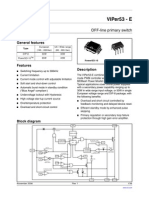
- Viper 53Document36 pagesViper 53Heêr ÔccNo ratings yet
- IESCO Jr. Engineer Test 2020 Mcqs - NTSDocument6 pagesIESCO Jr. Engineer Test 2020 Mcqs - NTSHassamNo ratings yet
- Week 2Document90 pagesWeek 2Raising StarNo ratings yet
- 1017 2367 1 PB PDFDocument10 pages1017 2367 1 PB PDFEdgar FarfánNo ratings yet
- Balancing Control of Two Wheeled Mobile Robot Based On PDFDocument7 pagesBalancing Control of Two Wheeled Mobile Robot Based On PDFvinod kumarNo ratings yet
- Basic Electrical Simulation Lab 3-1 PDFDocument102 pagesBasic Electrical Simulation Lab 3-1 PDFAjay KatherlaNo ratings yet
- Control Blocks DiagramsDocument27 pagesControl Blocks DiagramsJohn FillmoreNo ratings yet
- Syllabus GTU PDFDocument3 pagesSyllabus GTU PDFkalpesh_chandakNo ratings yet
- ECE2607 Industrial ManagementDocument4 pagesECE2607 Industrial ManagementMeghanand BhamareNo ratings yet
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolNo ratings yet
- Module 3 - Control System BDDocument127 pagesModule 3 - Control System BDrohitrajww4No ratings yet
- Automatic Control Basic Course: Exercises 2021Document124 pagesAutomatic Control Basic Course: Exercises 2021Duc-Duy Pham NguyenNo ratings yet
- TechTeach SimViewDocument123 pagesTechTeach SimViewAlka389No ratings yet
- Control System Ece QB EeeeeeeDocument73 pagesControl System Ece QB EeeeeeeARNI JAYACHANDRANo ratings yet
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocument91 pagesAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNo ratings yet
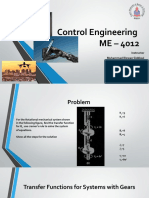
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument14 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- Semeniano, Hubert B.: School of EECE, Mapua University Intramuros, ManilaDocument1 pageSemeniano, Hubert B.: School of EECE, Mapua University Intramuros, ManilaHubert SemenianoNo ratings yet
- Objectives: 054414 Process Control System DesignDocument15 pagesObjectives: 054414 Process Control System DesignAshfaqur Rahman TahashinNo ratings yet
- A Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemDocument13 pagesA Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemRicardo Angelo Quispe MendizábalNo ratings yet
- LCS LabDocument16 pagesLCS LabnoumanNo ratings yet
- Small-Signal Stability Enhancement Approach For VSC-HVDC System Under Weak AC Grid Conditions Based On Single-Input Single-Output Transfer Function ModelDocument11 pagesSmall-Signal Stability Enhancement Approach For VSC-HVDC System Under Weak AC Grid Conditions Based On Single-Input Single-Output Transfer Function Modelramya sreeNo ratings yet
- Sudan University of Science and Technology College of Graduate Studies Department of Electrical EngineeringDocument85 pagesSudan University of Science and Technology College of Graduate Studies Department of Electrical EngineeringAbdel-Rahman Saifedin Arandas100% (1)






















































































Download as pdf or txt
You might also like
- User's Guide: RF Toolbox™Document786 pagesUser's Guide: RF Toolbox™Amardeep KumarNo ratings yet
- (WWW - Entrance-Exam - Net) - IETE AMIETE ET-CS-IT (Old Scheme) Signals and Systems Sample Paper 1Document4 pages(WWW - Entrance-Exam - Net) - IETE AMIETE ET-CS-IT (Old Scheme) Signals and Systems Sample Paper 1Jonas ParreñoNo ratings yet
- Ejercicios DSCDocument39 pagesEjercicios DSCFreyley LeyvaNo ratings yet
- Automatic Control - ExercisesDocument140 pagesAutomatic Control - Exerciseshasan bishNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- 2019 F Midterm SolnDocument16 pages2019 F Midterm SolnaesakipNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- RT Exercises and Solutions Med TentatalDocument264 pagesRT Exercises and Solutions Med TentatalSANA100% (1)
- Unit Iv: Continuous and Discrete Time SystemsDocument32 pagesUnit Iv: Continuous and Discrete Time SystemsAnbazhagan SelvanathanNo ratings yet
- 1731250280907_Assignment 1_mergedDocument4 pages1731250280907_Assignment 1_mergedilovejeevan64No ratings yet
- EEF467 Tutorial Sheet 2Document4 pagesEEF467 Tutorial Sheet 2NK-NGAMNo ratings yet
- X X X X X: Sinh Lim Sin Cos 1 2 1 2 1 3Document11 pagesX X X X X: Sinh Lim Sin Cos 1 2 1 2 1 3Chavan ShendeNo ratings yet
- 3C5 Exam 2019Document12 pages3C5 Exam 2019kotagoNo ratings yet
- DSC Exercises PDFDocument37 pagesDSC Exercises PDFsamielmadssiaNo ratings yet
- Exam RT2 2015 SummerDocument7 pagesExam RT2 2015 SummerLuis CarvalhoNo ratings yet
- 2019 Spring Final SolutionDocument13 pages2019 Spring Final Solutionyulin linNo ratings yet
- #QF604 MCQ Practice Test 5Document4 pages#QF604 MCQ Practice Test 5johnnylou592No ratings yet
- Tutorial Sheet 1 Control SystemsDocument7 pagesTutorial Sheet 1 Control SystemsrushilrmalodeNo ratings yet
- U I (UIU) : Expt. No. 2 M SDocument15 pagesU I (UIU) : Expt. No. 2 M SMaksud SarkerNo ratings yet
- GATE Me 1991Document13 pagesGATE Me 1991XADA YADANo ratings yet
- 2009 MergedDocument12 pages2009 Mergedomarlotfy455No ratings yet
- EC Signals and SystemsDocument48 pagesEC Signals and SystemsJeeva KeshavNo ratings yet
- 2020春季期末考解答Document11 pages2020春季期末考解答yulin linNo ratings yet
- ECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thDocument2 pagesECE 415, Fall 2003 Problem Set #1: Issued: September 2nd Due: September 9thsolteanNo ratings yet
- IIT JAM Physics 2006 PaperDocument9 pagesIIT JAM Physics 2006 Papertestseries.quantaNo ratings yet
- Signal and System6 PDFDocument23 pagesSignal and System6 PDFVikas Singh100% (1)
- Nodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsDocument29 pagesNodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsramlakhanNo ratings yet
- Nodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsDocument29 pagesNodia and Company: Gate Solved Paper Electrical Engineering Signals & SystemsramlakhanNo ratings yet
- EE - SIGNALS and SYSTEMS PDFDocument29 pagesEE - SIGNALS and SYSTEMS PDFramlakhanNo ratings yet
- Project Fall2015Document5 pagesProject Fall2015AlvinNo ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Assignment 2Document2 pagesAssignment 2Anirban HomroyNo ratings yet
- Exsheet 1Document4 pagesExsheet 1pobisas812No ratings yet
- Handout 4: Circle and Popov Criteria: Linear SystemDocument9 pagesHandout 4: Circle and Popov Criteria: Linear SystemsamandondonNo ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Assignment 1Document4 pagesAssignment 1Ashish KushwahaNo ratings yet
- Practice Questions For 336, v1.4: Part 1Document20 pagesPractice Questions For 336, v1.4: Part 1H Aries OñaNo ratings yet
- LTIDocument67 pagesLTIElectron FlowNo ratings yet
- 2A1G Partial Differential EquationsDocument6 pages2A1G Partial Differential EquationsJohn HowardNo ratings yet
- RG CW 14Document7 pagesRG CW 14Roy VeseyNo ratings yet
- Problem Set 3Document6 pagesProblem Set 3VASANTHKUMAR M SNo ratings yet
- Screenshot 2022-10-12 at 2.44.25 PMDocument6 pagesScreenshot 2022-10-12 at 2.44.25 PMً ًNo ratings yet
- Systems and Control PDFDocument9 pagesSystems and Control PDFHamid Farhan0% (1)
- S - S Final Paper 1Document3 pagesS - S Final Paper 1SumitNo ratings yet
- IIT-JAM 2020 SolutionDocument29 pagesIIT-JAM 2020 SolutionGuru prasad BiswalNo ratings yet
- Gate - in 2007Document30 pagesGate - in 2007prabhjot singh1No ratings yet
- Iit Jam Physics 2015Document10 pagesIit Jam Physics 2015Subha NayakNo ratings yet
- Klausur 2021Document7 pagesKlausur 2021AngelaNo ratings yet
- Tute 2Document2 pagesTute 2isiwaraumayangaNo ratings yet
- GhantaDocument15 pagesGhantarwehjgrebgNo ratings yet
- Final 2017-SpringDocument10 pagesFinal 2017-Springyulin linNo ratings yet
- Iit Jam Physics 2008Document5 pagesIit Jam Physics 2008s_adhyaNo ratings yet
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- MIT2 087F14 PracFinaexamv4Document6 pagesMIT2 087F14 PracFinaexamv4Carolina RibeiroNo ratings yet
- Exercises PrintDocument124 pagesExercises Printusr_kotoNo ratings yet
- IES Electrical Engineering Previous Year Question Paper 2000 Paper 1 PDFDocument17 pagesIES Electrical Engineering Previous Year Question Paper 2000 Paper 1 PDFkoinsuriNo ratings yet
- 201702070515035Document8 pages201702070515035incandescentglow96No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- M1Report Sapiandante 24Document6 pagesM1Report Sapiandante 24Goran SapiandanteNo ratings yet
- An Introduction To The Laplace Transform and The Z Transform - Anthony C.grove (PH 1991 138s)Document140 pagesAn Introduction To The Laplace Transform and The Z Transform - Anthony C.grove (PH 1991 138s)Cleyton RambaldiNo ratings yet
- Introduction To Feedback and Control SystemsDocument26 pagesIntroduction To Feedback and Control SystemsSarah Santiago100% (3)
- Electronics and Communication Ece Formula Book For Gate Ies and PsuDocument56 pagesElectronics and Communication Ece Formula Book For Gate Ies and PsuThomas James88% (16)
- Syllabus of Jntu IV - I Psoc 08 Batch R 07Document2 pagesSyllabus of Jntu IV - I Psoc 08 Batch R 07Krishna Prasad100% (1)
- 8-Lecture 39 TF To SS and SS To TF ConversionDocument18 pages8-Lecture 39 TF To SS and SS To TF ConversionHamza KhanNo ratings yet
- Viper 53Document36 pagesViper 53Heêr ÔccNo ratings yet
- IESCO Jr. Engineer Test 2020 Mcqs - NTSDocument6 pagesIESCO Jr. Engineer Test 2020 Mcqs - NTSHassamNo ratings yet
- Week 2Document90 pagesWeek 2Raising StarNo ratings yet
- 1017 2367 1 PB PDFDocument10 pages1017 2367 1 PB PDFEdgar FarfánNo ratings yet
- Balancing Control of Two Wheeled Mobile Robot Based On PDFDocument7 pagesBalancing Control of Two Wheeled Mobile Robot Based On PDFvinod kumarNo ratings yet
- Basic Electrical Simulation Lab 3-1 PDFDocument102 pagesBasic Electrical Simulation Lab 3-1 PDFAjay KatherlaNo ratings yet
- Control Blocks DiagramsDocument27 pagesControl Blocks DiagramsJohn FillmoreNo ratings yet
- Syllabus GTU PDFDocument3 pagesSyllabus GTU PDFkalpesh_chandakNo ratings yet
- ECE2607 Industrial ManagementDocument4 pagesECE2607 Industrial ManagementMeghanand BhamareNo ratings yet
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolNo ratings yet
- Module 3 - Control System BDDocument127 pagesModule 3 - Control System BDrohitrajww4No ratings yet
- Automatic Control Basic Course: Exercises 2021Document124 pagesAutomatic Control Basic Course: Exercises 2021Duc-Duy Pham NguyenNo ratings yet
- TechTeach SimViewDocument123 pagesTechTeach SimViewAlka389No ratings yet
- Control System Ece QB EeeeeeeDocument73 pagesControl System Ece QB EeeeeeeARNI JAYACHANDRANo ratings yet
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocument91 pagesAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNo ratings yet
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiDocument14 pagesControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilNo ratings yet
- Semeniano, Hubert B.: School of EECE, Mapua University Intramuros, ManilaDocument1 pageSemeniano, Hubert B.: School of EECE, Mapua University Intramuros, ManilaHubert SemenianoNo ratings yet
- Objectives: 054414 Process Control System DesignDocument15 pagesObjectives: 054414 Process Control System DesignAshfaqur Rahman TahashinNo ratings yet
- A Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemDocument13 pagesA Ground-Motion Transfer Function Matrix Between Two Nearby Rock and Soil Sites: A System Identification ProblemRicardo Angelo Quispe MendizábalNo ratings yet
- LCS LabDocument16 pagesLCS LabnoumanNo ratings yet
- Small-Signal Stability Enhancement Approach For VSC-HVDC System Under Weak AC Grid Conditions Based On Single-Input Single-Output Transfer Function ModelDocument11 pagesSmall-Signal Stability Enhancement Approach For VSC-HVDC System Under Weak AC Grid Conditions Based On Single-Input Single-Output Transfer Function Modelramya sreeNo ratings yet
- Sudan University of Science and Technology College of Graduate Studies Department of Electrical EngineeringDocument85 pagesSudan University of Science and Technology College of Graduate Studies Department of Electrical EngineeringAbdel-Rahman Saifedin Arandas100% (1)