
lec2
lec2
You might also like
- Engineering Metrology R K Jain PDFDocument1,260 pagesEngineering Metrology R K Jain PDFmanoj kumar G50% (4)
- Howard's Gift Uncommon Wisdom To Inspire Your Life's WorkDocument13 pagesHoward's Gift Uncommon Wisdom To Inspire Your Life's WorkMacmillan Publishers83% (6)
- Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesDocument27 pagesApplied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesBELAL ALSUBARINo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIDocument25 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIlechu-92No ratings yet
- Lec 2Document13 pagesLec 2RAHUL NARANGNo ratings yet
- Lec 52Document26 pagesLec 52Ganthimathi VNo ratings yet
- lec7Document21 pageslec7manoj kumar GNo ratings yet
- Lec 6Document20 pagesLec 6ዘረአዳም ዘመንቆረርNo ratings yet
- Lec 8Document11 pagesLec 8Ravi KumarNo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 01 Properties of Surfaces - IDocument27 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 01 Properties of Surfaces - Ilechu-92No ratings yet
- Lec 20Document14 pagesLec 20Janaki RamanNo ratings yet
- Lagrange's Equations PDFDocument26 pagesLagrange's Equations PDFDebkanta DasNo ratings yet
- lec8Document39 pageslec8manoj kumar GNo ratings yet
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDocument12 pagesInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuNo ratings yet
- Dynamics of MachinesDocument14 pagesDynamics of MachinesIshu GoelNo ratings yet
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Lec 22Document15 pagesLec 22shailiayushNo ratings yet
- Lec4 PDFDocument21 pagesLec4 PDFElisée NdjabuNo ratings yet
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDocument9 pagesMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everNo ratings yet
- Networks and Systems Prof V.G K. Murti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 10 Fourier SeriesDocument27 pagesNetworks and Systems Prof V.G K. Murti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 10 Fourier SeriesSharath MunduriNo ratings yet
- Epsilon Delta ProofsDocument16 pagesEpsilon Delta Proofsmcamazigh100% (1)
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Lec 21Document12 pagesLec 21themaker1602No ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- pr1TLyPyDw PDFDocument4 pagespr1TLyPyDw PDFالديزل الجراديNo ratings yet
- Finite Element Method Mod-3 Lec-2Document20 pagesFinite Element Method Mod-3 Lec-2PSINGH02No ratings yet
- Technical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture - 2 Think and AnalyzeDocument20 pagesTechnical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture - 2 Think and AnalyzeAnonymous 5KGkE3VNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument38 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisNo ratings yet
- lec9Document24 pageslec9manoj kumar GNo ratings yet
- Lec 59Document21 pagesLec 59Elisée NdjabuNo ratings yet
- Lecture 10 - Basic TransformDocument27 pagesLecture 10 - Basic TransformvespubekNo ratings yet
- What are Hilbert Spaces in laymen's terms_ __ quoraDocument13 pagesWhat are Hilbert Spaces in laymen's terms_ __ quoraisham dhNo ratings yet
- Lec 43Document10 pagesLec 43sixfacerajNo ratings yet
- Lec 4Document20 pagesLec 4pbhanududiNo ratings yet
- Introduction To Integration Part 2: The Definite Integral: Mary BarnesDocument28 pagesIntroduction To Integration Part 2: The Definite Integral: Mary BarnesJason LeeNo ratings yet
- The Basic Fundamentals of Dimension FusionDocument66 pagesThe Basic Fundamentals of Dimension FusionWilson MartinezNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasDocument40 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanNo ratings yet
- Lec 3Document18 pagesLec 3Mr G Kaliraj MECHNo ratings yet
- Aero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Document24 pagesAero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Anonymous 8f2veZfNo ratings yet
- Lec 2Document10 pagesLec 2Pramod KulkarniNo ratings yet
- Monthly116 129 VakilDocument14 pagesMonthly116 129 VakilbhulookNo ratings yet
- Name - AP Calculus BC Date - Approximation ProjectDocument4 pagesName - AP Calculus BC Date - Approximation ProjectzombielibraryNo ratings yet
- Lec5 PDFDocument40 pagesLec5 PDFEliNo ratings yet
- Refer Slide Time 00:17Document32 pagesRefer Slide Time 00:17vidhya dsNo ratings yet
- Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 10 Maxima, MinimaDocument22 pagesMathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 10 Maxima, MinimaSaidNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Document11 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Shahzaib Anwar OffNo ratings yet
- Lec 7Document15 pagesLec 7Chinmay GiriNo ratings yet
- Lec18 3 PDFDocument8 pagesLec18 3 PDFDharmendra JainNo ratings yet
- Lec 17 Introduction To Vector CalculusDocument22 pagesLec 17 Introduction To Vector CalculusVishnu ShashankNo ratings yet
- Lec 36Document25 pagesLec 36david lyodNo ratings yet
- 4 FunctionsDocument10 pages4 Functionssap6370No ratings yet
- Lec 7Document23 pagesLec 7Utkarsh VermaNo ratings yet
- Introduction To Integration Part 2: The Definite Integral: Mary BarnesDocument28 pagesIntroduction To Integration Part 2: The Definite Integral: Mary BarnesManoj RautNo ratings yet
- Complex Analysis - HoustonDocument98 pagesComplex Analysis - HoustonPablo MartínezNo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture No - 02 Properties of Surfaces - IIDocument21 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture No - 02 Properties of Surfaces - IIlechu-92No ratings yet
- Lec 2Document11 pagesLec 2sinojkumar malipronNo ratings yet
- Lec 2Document11 pagesLec 2sinojkumar malipronNo ratings yet
- BasicDocument23 pagesBasicUnique TechnicalNo ratings yet
- Lec 3Document7 pagesLec 3Pramod KulkarniNo ratings yet
- Mathia 2Document15 pagesMathia 2Billan LiaoNo ratings yet
- Week_04Document5 pagesWeek_04manoj kumar GNo ratings yet
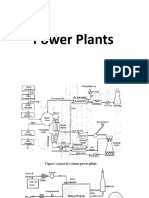
- Power PlantsDocument12 pagesPower Plantsmanoj kumar GNo ratings yet
- Declaration of Competing InterestsDocument1 pageDeclaration of Competing Interestsmanoj kumar GNo ratings yet
- MainDocument21 pagesMainmanoj kumar GNo ratings yet
- Bio Reactor Land Fills-Impart-Km4Document24 pagesBio Reactor Land Fills-Impart-Km4manoj kumar GNo ratings yet
- 1 s2.0 S2213956720300578 MainDocument13 pages1 s2.0 S2213956720300578 Mainmanoj kumar GNo ratings yet
- FluidpowerintroductionDocument32 pagesFluidpowerintroductionmanoj kumar GNo ratings yet
- Waste Disposal Options-Imp-Km1Document40 pagesWaste Disposal Options-Imp-Km1manoj kumar GNo ratings yet
- Leachate Treatment-Km-Impart-Km5Document53 pagesLeachate Treatment-Km-Impart-Km5manoj kumar GNo ratings yet
- Advances in MetrologyDocument40 pagesAdvances in Metrologymanoj kumar GNo ratings yet
- Lecture 2 LetteringDocument25 pagesLecture 2 Letteringmanoj kumar GNo ratings yet
- Basics of MetrologyDocument37 pagesBasics of Metrologymanoj kumar GNo ratings yet
- Cycloid and InvoluteDocument1 pageCycloid and Involutemanoj kumar GNo ratings yet
- Troubleshooting and ApplicationsDocument12 pagesTroubleshooting and Applicationsmanoj kumar GNo ratings yet
- Projection of PointsDocument39 pagesProjection of Pointsmanoj kumar GNo ratings yet
- (K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)Document389 pages(K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)manoj kumar G100% (1)
- E 20240407 Charge Calc MethodsDocument3 pagesE 20240407 Charge Calc Methodsamarsoni03697No ratings yet
- Inaccuracies in Manometric Central Venous Pressure MeasurementDocument10 pagesInaccuracies in Manometric Central Venous Pressure MeasurementmfhfhfNo ratings yet
- UGC NET Paper 1Document17 pagesUGC NET Paper 1radhaNo ratings yet
- Flow Chart Example For ThesisDocument4 pagesFlow Chart Example For Thesisjuliasolembellevue100% (2)
- The 12 Elements of An Information Security Policy - Reader ViewDocument7 pagesThe 12 Elements of An Information Security Policy - Reader ViewHoney DhaliwalNo ratings yet
- Interview Nadeem Haque EvolutionDocument7 pagesInterview Nadeem Haque Evolutionhaque_nadeem1188No ratings yet
- Art NouveauDocument73 pagesArt NouveauRuqayya AhmedNo ratings yet
- Chapter 4 Top-Down Parsing: OutlineDocument17 pagesChapter 4 Top-Down Parsing: Outlinegdayanand4uNo ratings yet
- Intermediate PhonicsDocument128 pagesIntermediate PhonicsRIchard Longmire-BownsNo ratings yet
- Extraction of A Three Component Mixture-750mgDocument3 pagesExtraction of A Three Component Mixture-750mgDaniel McDermottNo ratings yet
- Launching Code, Algeria's First Coding School: Press ReleaseDocument3 pagesLaunching Code, Algeria's First Coding School: Press ReleaseClaire PershanNo ratings yet
- Consolidated Terminals Inc. v. Artex - G.R. No. L-25748Document1 pageConsolidated Terminals Inc. v. Artex - G.R. No. L-25748eiram23No ratings yet
- Double Flower CelticDocument2 pagesDouble Flower CelticRubi Perla OrozcoNo ratings yet
- SR-750 C 611762 GB 1034-4Document12 pagesSR-750 C 611762 GB 1034-4ck_peyNo ratings yet
- C BAND Satellites Recivable in A INDIA PDFDocument3 pagesC BAND Satellites Recivable in A INDIA PDFchidambaram kasiNo ratings yet
- Sf4 ConceptDocument10 pagesSf4 ConceptAndrás FarkasNo ratings yet
- MYY&MZZ Manual Transmission (Ver4)Document32 pagesMYY&MZZ Manual Transmission (Ver4)Vahid Reza MohammadiNo ratings yet
- Safety Plan 2023Document4 pagesSafety Plan 2023Raphy BrionesNo ratings yet
- Market Risk ConceptDocument27 pagesMarket Risk ConceptMhmd ZaraketNo ratings yet
- Kondensasi Aldol Silang PDFDocument7 pagesKondensasi Aldol Silang PDFRiska Elya VenilitaNo ratings yet
- Varsha PitrodaDocument1 pageVarsha Pitrodaarun sivaNo ratings yet
- Recall AcknowledgementDocument3 pagesRecall AcknowledgementNational Content Desk100% (1)
- Software Requirements Specification: Version 1.0 ApprovedDocument5 pagesSoftware Requirements Specification: Version 1.0 Approvedsameen khanNo ratings yet
- Notes For Chemistry PracticalsDocument32 pagesNotes For Chemistry Practicalsj0ntj2ivjyNo ratings yet
- Measuring Building Perimeters and Centrelines - Worked Examples PDFDocument22 pagesMeasuring Building Perimeters and Centrelines - Worked Examples PDFEzra MeshackNo ratings yet
- I'Ll Eat When I'm Dead - ExtractDocument25 pagesI'Ll Eat When I'm Dead - ExtractQuercus BooksNo ratings yet
- Example of Business Case ReportDocument3 pagesExample of Business Case ReportCORINE NDLOVUNo ratings yet
- Ch3 Crack SealingDocument26 pagesCh3 Crack SealingWinengkuNo ratings yet
- Page1 NM NMS 50 HZDocument1 pagePage1 NM NMS 50 HZGoce VasilevskiNo ratings yet








































































































Download as pdf or txt
You might also like
- Engineering Metrology R K Jain PDFDocument1,260 pagesEngineering Metrology R K Jain PDFmanoj kumar G50% (4)
- Howard's Gift Uncommon Wisdom To Inspire Your Life's WorkDocument13 pagesHoward's Gift Uncommon Wisdom To Inspire Your Life's WorkMacmillan Publishers83% (6)
- Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesDocument27 pagesApplied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesBELAL ALSUBARINo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIDocument25 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIlechu-92No ratings yet
- Lec 2Document13 pagesLec 2RAHUL NARANGNo ratings yet
- Lec 52Document26 pagesLec 52Ganthimathi VNo ratings yet
- lec7Document21 pageslec7manoj kumar GNo ratings yet
- Lec 6Document20 pagesLec 6ዘረአዳም ዘመንቆረርNo ratings yet
- Lec 8Document11 pagesLec 8Ravi KumarNo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 01 Properties of Surfaces - IDocument27 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 01 Properties of Surfaces - Ilechu-92No ratings yet
- Lec 20Document14 pagesLec 20Janaki RamanNo ratings yet
- Lagrange's Equations PDFDocument26 pagesLagrange's Equations PDFDebkanta DasNo ratings yet
- lec8Document39 pageslec8manoj kumar GNo ratings yet
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDocument12 pagesInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuNo ratings yet
- Dynamics of MachinesDocument14 pagesDynamics of MachinesIshu GoelNo ratings yet
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Lec 22Document15 pagesLec 22shailiayushNo ratings yet
- Lec4 PDFDocument21 pagesLec4 PDFElisée NdjabuNo ratings yet
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDocument9 pagesMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everNo ratings yet
- Networks and Systems Prof V.G K. Murti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 10 Fourier SeriesDocument27 pagesNetworks and Systems Prof V.G K. Murti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 10 Fourier SeriesSharath MunduriNo ratings yet
- Epsilon Delta ProofsDocument16 pagesEpsilon Delta Proofsmcamazigh100% (1)
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Lec 21Document12 pagesLec 21themaker1602No ratings yet
- Lec 10Document36 pagesLec 10vidhya dsNo ratings yet
- pr1TLyPyDw PDFDocument4 pagespr1TLyPyDw PDFالديزل الجراديNo ratings yet
- Finite Element Method Mod-3 Lec-2Document20 pagesFinite Element Method Mod-3 Lec-2PSINGH02No ratings yet
- Technical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture - 2 Think and AnalyzeDocument20 pagesTechnical Arts 101 Prof. Anupam Saxena Department of Mechanical Engineering Indian Institute of Technology, Delhi Lecture - 2 Think and AnalyzeAnonymous 5KGkE3VNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument38 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, Madrasprince francisNo ratings yet
- lec9Document24 pageslec9manoj kumar GNo ratings yet
- Lec 59Document21 pagesLec 59Elisée NdjabuNo ratings yet
- Lecture 10 - Basic TransformDocument27 pagesLecture 10 - Basic TransformvespubekNo ratings yet
- What are Hilbert Spaces in laymen's terms_ __ quoraDocument13 pagesWhat are Hilbert Spaces in laymen's terms_ __ quoraisham dhNo ratings yet
- Lec 43Document10 pagesLec 43sixfacerajNo ratings yet
- Lec 4Document20 pagesLec 4pbhanududiNo ratings yet
- Introduction To Integration Part 2: The Definite Integral: Mary BarnesDocument28 pagesIntroduction To Integration Part 2: The Definite Integral: Mary BarnesJason LeeNo ratings yet
- The Basic Fundamentals of Dimension FusionDocument66 pagesThe Basic Fundamentals of Dimension FusionWilson MartinezNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrasDocument40 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Science, MadrastamizhanNo ratings yet
- Lec 3Document18 pagesLec 3Mr G Kaliraj MECHNo ratings yet
- Aero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Document24 pagesAero Elasticity Prof. C. V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 23Anonymous 8f2veZfNo ratings yet
- Lec 2Document10 pagesLec 2Pramod KulkarniNo ratings yet
- Monthly116 129 VakilDocument14 pagesMonthly116 129 VakilbhulookNo ratings yet
- Name - AP Calculus BC Date - Approximation ProjectDocument4 pagesName - AP Calculus BC Date - Approximation ProjectzombielibraryNo ratings yet
- Lec5 PDFDocument40 pagesLec5 PDFEliNo ratings yet
- Refer Slide Time 00:17Document32 pagesRefer Slide Time 00:17vidhya dsNo ratings yet
- Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 10 Maxima, MinimaDocument22 pagesMathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture - 10 Maxima, MinimaSaidNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Document11 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 10Shahzaib Anwar OffNo ratings yet
- Lec 7Document15 pagesLec 7Chinmay GiriNo ratings yet
- Lec18 3 PDFDocument8 pagesLec18 3 PDFDharmendra JainNo ratings yet
- Lec 17 Introduction To Vector CalculusDocument22 pagesLec 17 Introduction To Vector CalculusVishnu ShashankNo ratings yet
- Lec 36Document25 pagesLec 36david lyodNo ratings yet
- 4 FunctionsDocument10 pages4 Functionssap6370No ratings yet
- Lec 7Document23 pagesLec 7Utkarsh VermaNo ratings yet
- Introduction To Integration Part 2: The Definite Integral: Mary BarnesDocument28 pagesIntroduction To Integration Part 2: The Definite Integral: Mary BarnesManoj RautNo ratings yet
- Complex Analysis - HoustonDocument98 pagesComplex Analysis - HoustonPablo MartínezNo ratings yet
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture No - 02 Properties of Surfaces - IIDocument21 pagesEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture No - 02 Properties of Surfaces - IIlechu-92No ratings yet
- Lec 2Document11 pagesLec 2sinojkumar malipronNo ratings yet
- Lec 2Document11 pagesLec 2sinojkumar malipronNo ratings yet
- BasicDocument23 pagesBasicUnique TechnicalNo ratings yet
- Lec 3Document7 pagesLec 3Pramod KulkarniNo ratings yet
- Mathia 2Document15 pagesMathia 2Billan LiaoNo ratings yet
- Week_04Document5 pagesWeek_04manoj kumar GNo ratings yet
- Power PlantsDocument12 pagesPower Plantsmanoj kumar GNo ratings yet
- Declaration of Competing InterestsDocument1 pageDeclaration of Competing Interestsmanoj kumar GNo ratings yet
- MainDocument21 pagesMainmanoj kumar GNo ratings yet
- Bio Reactor Land Fills-Impart-Km4Document24 pagesBio Reactor Land Fills-Impart-Km4manoj kumar GNo ratings yet
- 1 s2.0 S2213956720300578 MainDocument13 pages1 s2.0 S2213956720300578 Mainmanoj kumar GNo ratings yet
- FluidpowerintroductionDocument32 pagesFluidpowerintroductionmanoj kumar GNo ratings yet
- Waste Disposal Options-Imp-Km1Document40 pagesWaste Disposal Options-Imp-Km1manoj kumar GNo ratings yet
- Leachate Treatment-Km-Impart-Km5Document53 pagesLeachate Treatment-Km-Impart-Km5manoj kumar GNo ratings yet
- Advances in MetrologyDocument40 pagesAdvances in Metrologymanoj kumar GNo ratings yet
- Lecture 2 LetteringDocument25 pagesLecture 2 Letteringmanoj kumar GNo ratings yet
- Basics of MetrologyDocument37 pagesBasics of Metrologymanoj kumar GNo ratings yet
- Cycloid and InvoluteDocument1 pageCycloid and Involutemanoj kumar GNo ratings yet
- Troubleshooting and ApplicationsDocument12 pagesTroubleshooting and Applicationsmanoj kumar GNo ratings yet
- Projection of PointsDocument39 pagesProjection of Pointsmanoj kumar GNo ratings yet
- (K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)Document389 pages(K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)manoj kumar G100% (1)
- E 20240407 Charge Calc MethodsDocument3 pagesE 20240407 Charge Calc Methodsamarsoni03697No ratings yet
- Inaccuracies in Manometric Central Venous Pressure MeasurementDocument10 pagesInaccuracies in Manometric Central Venous Pressure MeasurementmfhfhfNo ratings yet
- UGC NET Paper 1Document17 pagesUGC NET Paper 1radhaNo ratings yet
- Flow Chart Example For ThesisDocument4 pagesFlow Chart Example For Thesisjuliasolembellevue100% (2)
- The 12 Elements of An Information Security Policy - Reader ViewDocument7 pagesThe 12 Elements of An Information Security Policy - Reader ViewHoney DhaliwalNo ratings yet
- Interview Nadeem Haque EvolutionDocument7 pagesInterview Nadeem Haque Evolutionhaque_nadeem1188No ratings yet
- Art NouveauDocument73 pagesArt NouveauRuqayya AhmedNo ratings yet
- Chapter 4 Top-Down Parsing: OutlineDocument17 pagesChapter 4 Top-Down Parsing: Outlinegdayanand4uNo ratings yet
- Intermediate PhonicsDocument128 pagesIntermediate PhonicsRIchard Longmire-BownsNo ratings yet
- Extraction of A Three Component Mixture-750mgDocument3 pagesExtraction of A Three Component Mixture-750mgDaniel McDermottNo ratings yet
- Launching Code, Algeria's First Coding School: Press ReleaseDocument3 pagesLaunching Code, Algeria's First Coding School: Press ReleaseClaire PershanNo ratings yet
- Consolidated Terminals Inc. v. Artex - G.R. No. L-25748Document1 pageConsolidated Terminals Inc. v. Artex - G.R. No. L-25748eiram23No ratings yet
- Double Flower CelticDocument2 pagesDouble Flower CelticRubi Perla OrozcoNo ratings yet
- SR-750 C 611762 GB 1034-4Document12 pagesSR-750 C 611762 GB 1034-4ck_peyNo ratings yet
- C BAND Satellites Recivable in A INDIA PDFDocument3 pagesC BAND Satellites Recivable in A INDIA PDFchidambaram kasiNo ratings yet
- Sf4 ConceptDocument10 pagesSf4 ConceptAndrás FarkasNo ratings yet
- MYY&MZZ Manual Transmission (Ver4)Document32 pagesMYY&MZZ Manual Transmission (Ver4)Vahid Reza MohammadiNo ratings yet
- Safety Plan 2023Document4 pagesSafety Plan 2023Raphy BrionesNo ratings yet
- Market Risk ConceptDocument27 pagesMarket Risk ConceptMhmd ZaraketNo ratings yet
- Kondensasi Aldol Silang PDFDocument7 pagesKondensasi Aldol Silang PDFRiska Elya VenilitaNo ratings yet
- Varsha PitrodaDocument1 pageVarsha Pitrodaarun sivaNo ratings yet
- Recall AcknowledgementDocument3 pagesRecall AcknowledgementNational Content Desk100% (1)
- Software Requirements Specification: Version 1.0 ApprovedDocument5 pagesSoftware Requirements Specification: Version 1.0 Approvedsameen khanNo ratings yet
- Notes For Chemistry PracticalsDocument32 pagesNotes For Chemistry Practicalsj0ntj2ivjyNo ratings yet
- Measuring Building Perimeters and Centrelines - Worked Examples PDFDocument22 pagesMeasuring Building Perimeters and Centrelines - Worked Examples PDFEzra MeshackNo ratings yet
- I'Ll Eat When I'm Dead - ExtractDocument25 pagesI'Ll Eat When I'm Dead - ExtractQuercus BooksNo ratings yet
- Example of Business Case ReportDocument3 pagesExample of Business Case ReportCORINE NDLOVUNo ratings yet
- Ch3 Crack SealingDocument26 pagesCh3 Crack SealingWinengkuNo ratings yet
- Page1 NM NMS 50 HZDocument1 pagePage1 NM NMS 50 HZGoce VasilevskiNo ratings yet