Download as pdf or txt
You might also like
- Engineering Metrology R K Jain PDFDocument1,260 pagesEngineering Metrology R K Jain PDFmanoj kumar G50% (4)
- Lec 5Document23 pagesLec 5abimanaNo ratings yet
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- Lec 9Document20 pagesLec 9Pramod KulkarniNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument20 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Document26 pagesAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalNo ratings yet
- Lec11 PDFDocument25 pagesLec11 PDFAbhishek AroraNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13Document23 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13mahendranNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11Document25 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 11abimanaNo ratings yet
- NPTEL FEM Lec3Document42 pagesNPTEL FEM Lec3EliNo ratings yet
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Lec 31Document23 pagesLec 31rajNo ratings yet
- Classical Mechanics: From Newtonian To Lagrangian FormulationDocument9 pagesClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainNo ratings yet
- Finite Element Method Prof C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument22 pagesFinite Element Method Prof C. S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9Document24 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 9abimanaNo ratings yet
- lec7Document21 pageslec7manoj kumar GNo ratings yet
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraNo ratings yet
- lec2Document39 pageslec2manoj kumar GNo ratings yet
- Finite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument27 pagesFinite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaNo ratings yet
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Document29 pagesClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Anonymous 8f2veZfNo ratings yet
- Lec 52Document26 pagesLec 52Ganthimathi VNo ratings yet
- lec5Document15 pageslec5manoj kumar GNo ratings yet
- GeagergaegDocument3 pagesGeagergaegAnfernee LoNo ratings yet
- lec8Document39 pageslec8manoj kumar GNo ratings yet
- Finite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringDocument27 pagesFinite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringabimanaNo ratings yet
- Linear and Volumetric Deformation Perspectives From Mass ConservationDocument10 pagesLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNo ratings yet
- Lec19 PDFDocument22 pagesLec19 PDFdurgaraokamireddyNo ratings yet
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 pagesTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuNo ratings yet
- Lec 37Document12 pagesLec 37maherkamelNo ratings yet
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDocument12 pagesInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuNo ratings yet
- Lec 17 Introduction To Vector CalculusDocument22 pagesLec 17 Introduction To Vector CalculusVishnu ShashankNo ratings yet
- Lec 43Document10 pagesLec 43sixfacerajNo ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: Professorgaur1234No ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document24 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14abimanaNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26Document26 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 26mahendranNo ratings yet
- Lec 21Document19 pagesLec 21Soumyadeep BoseNo ratings yet
- Lec 20Document29 pagesLec 20shubhamNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasdurgaraokamireddyNo ratings yet
- Lec 18Document6 pagesLec 18saswat sahooNo ratings yet
- Instructor (Brad Osgood) :that Was Quick. Looks Like The Crowd's A Little Thin Out ThereDocument13 pagesInstructor (Brad Osgood) :that Was Quick. Looks Like The Crowd's A Little Thin Out ThereElisée NdjabuNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17Document26 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 17mahendranNo ratings yet
- Linear Algebra Hoffman Homework SolutionsDocument6 pagesLinear Algebra Hoffman Homework Solutionsaxhwefzod100% (1)
- Lec5 PDFDocument40 pagesLec5 PDFEliNo ratings yet
- Lec 2Document13 pagesLec 2RAHUL NARANGNo ratings yet
- Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, MadrasDocument27 pagesFinite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madrasnataraj deshpandeNo ratings yet
- MITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: ProfessorDocument16 pagesMITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: Professorfrank_grimesNo ratings yet
- lec4Document43 pageslec4manoj kumar GNo ratings yet
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 pagesComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNo ratings yet
- NPTEL FEM Lec6Document29 pagesNPTEL FEM Lec6EliNo ratings yet
- Foundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13Document15 pagesFoundation of Computational Fluid Dynamics Dr. S. Vengadesan Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 13mahesh dNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15Document25 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 15mahendranNo ratings yet
- Instructor (Brad Osgood) :it's True, You Know. There I Was, Lying There and The Cop SaidDocument12 pagesInstructor (Brad Osgood) :it's True, You Know. There I Was, Lying There and The Cop SaidMohan KumarNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5Document27 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 5abimanaNo ratings yet
- Aero Elasticity Prof. C. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 2Document25 pagesAero Elasticity Prof. C. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 2Anonymous 8f2veZfNo ratings yet
- Lec 23Document13 pagesLec 23sixfacerajNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29Document30 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 29mahendranNo ratings yet
- Lec1 PDFDocument22 pagesLec1 PDFsuntararaajanNo ratings yet
- Instructor (Brad Osgood) :all Right. Let Me Remind You of The Exam Information As IDocument8 pagesInstructor (Brad Osgood) :all Right. Let Me Remind You of The Exam Information As IElisée NdjabuNo ratings yet
- Week_04Document5 pagesWeek_04manoj kumar GNo ratings yet
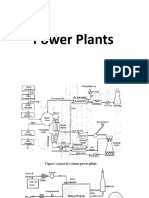
- Power PlantsDocument12 pagesPower Plantsmanoj kumar GNo ratings yet
- Declaration of Competing InterestsDocument1 pageDeclaration of Competing Interestsmanoj kumar GNo ratings yet
- MainDocument21 pagesMainmanoj kumar GNo ratings yet
- Bio Reactor Land Fills-Impart-Km4Document24 pagesBio Reactor Land Fills-Impart-Km4manoj kumar GNo ratings yet
- 1 s2.0 S2213956720300578 MainDocument13 pages1 s2.0 S2213956720300578 Mainmanoj kumar GNo ratings yet
- FluidpowerintroductionDocument32 pagesFluidpowerintroductionmanoj kumar GNo ratings yet
- Waste Disposal Options-Imp-Km1Document40 pagesWaste Disposal Options-Imp-Km1manoj kumar GNo ratings yet
- Leachate Treatment-Km-Impart-Km5Document53 pagesLeachate Treatment-Km-Impart-Km5manoj kumar GNo ratings yet
- Advances in MetrologyDocument40 pagesAdvances in Metrologymanoj kumar GNo ratings yet
- Lecture 2 LetteringDocument25 pagesLecture 2 Letteringmanoj kumar GNo ratings yet
- Basics of MetrologyDocument37 pagesBasics of Metrologymanoj kumar GNo ratings yet
- Cycloid and InvoluteDocument1 pageCycloid and Involutemanoj kumar GNo ratings yet
- Troubleshooting and ApplicationsDocument12 pagesTroubleshooting and Applicationsmanoj kumar GNo ratings yet
- Projection of PointsDocument39 pagesProjection of Pointsmanoj kumar GNo ratings yet
- (K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)Document389 pages(K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)manoj kumar G100% (1)
- Combined Residential CSDocument30 pagesCombined Residential CSCarlotaGomesNo ratings yet
- PC 03 One Way SlabsDocument4 pagesPC 03 One Way SlabsEdwin BernatNo ratings yet
- Structural Design Using Bamboo - Code of Practice: Indian StandardDocument36 pagesStructural Design Using Bamboo - Code of Practice: Indian StandardratnatejreddyNo ratings yet
- CHP 4 - 4.3 Determinate Structural AnalysisDocument57 pagesCHP 4 - 4.3 Determinate Structural Analysismhazarath murariNo ratings yet
- Design A Cantilever Retaining Wall To Retain An Earth Embankment of 4 - 1Document12 pagesDesign A Cantilever Retaining Wall To Retain An Earth Embankment of 4 - 1yudhishkarthickNo ratings yet
- BSNL Summer TrainingDocument258 pagesBSNL Summer TrainingTarun SamaNo ratings yet
- Comparative Analysis of RCC and Steel Building Using STAAD ProDocument11 pagesComparative Analysis of RCC and Steel Building Using STAAD ProIJRASETPublicationsNo ratings yet
- Som Strength of Material Question BankDocument16 pagesSom Strength of Material Question BankarindamckbtNo ratings yet
- ULTIMATE STRESS DESIGN Sample OnlyDocument2 pagesULTIMATE STRESS DESIGN Sample OnlyE SNo ratings yet
- Grade Beam Profile and ScheduleDocument1 pageGrade Beam Profile and ScheduleErga StructureNo ratings yet
- Ball WarpingDocument15 pagesBall WarpingShamima akter100% (1)
- SteelwiseDocument3 pagesSteelwiseAnonymous 7MdZQn1No ratings yet
- Wongyeec 1969Document75 pagesWongyeec 1969ReemALMousawiNo ratings yet
- Bridge Calculus ExampleDocument59 pagesBridge Calculus Examplecris5001No ratings yet
- Beam SelectionDocument24 pagesBeam SelectionGustavNo ratings yet
- Revit Structure PRESEN ASSDocument18 pagesRevit Structure PRESEN ASSDuressa UrgessaNo ratings yet
- Pgsuper Design GuideDocument77 pagesPgsuper Design GuideLuis OrdoñezNo ratings yet
- Aci SP-183Document184 pagesAci SP-183Ryan TagaNo ratings yet
- Deflection Limits For CraneDocument13 pagesDeflection Limits For CraneTheoNo ratings yet
- AaaaaaaaaaDocument33 pagesAaaaaaaaaaMekonnen AyalNo ratings yet
- Laguna State Polytechnic University: Ession (10 Points) and C.) Steel Area Required For Tension. (5 Points)Document1 pageLaguna State Polytechnic University: Ession (10 Points) and C.) Steel Area Required For Tension. (5 Points)John Arvin EvangelistaNo ratings yet
- Design of Steel BeamsDocument25 pagesDesign of Steel Beamsronaldnyirenda2230No ratings yet
- EngDocument11 pagesEngMugiwara SparrowNo ratings yet
- Assignments Steel 2Document21 pagesAssignments Steel 2osama shabanNo ratings yet
- Dflection 6Document16 pagesDflection 6afiqNo ratings yet
- Diseño y Detalles End PlateDocument10 pagesDiseño y Detalles End PlateCesar CeronNo ratings yet
- FEM Design Verification Checklist For CSI - ETABS 2016 (Summary)Document25 pagesFEM Design Verification Checklist For CSI - ETABS 2016 (Summary)rahuljainNo ratings yet
- Nan Mudhalvan Project Report Batch 8Document46 pagesNan Mudhalvan Project Report Batch 8Visa Meena2351No ratings yet
- PDF 4 1 PDFDocument139 pagesPDF 4 1 PDFMohammed Mohsen Tadulan Tawfiq100% (1)
- Assigning Properties To Structural Geometry - TRNC03189Document55 pagesAssigning Properties To Structural Geometry - TRNC03189Kidd TornoNo ratings yet