Download as pdf or txt
You might also like
- Engineering Metrology R K Jain PDFDocument1,260 pagesEngineering Metrology R K Jain PDFmanoj kumar G50% (4)
- WORD FORMATION FOR CaeDocument6 pagesWORD FORMATION FOR Caerebecca100% (1)
- 7 E's LP Exemplar Bio. 8Document3 pages7 E's LP Exemplar Bio. 8ELLEN B.SINAHON100% (8)
- BAD Sample CodeDocument2 pagesBAD Sample CodeGlauber SantanaNo ratings yet
- lec2Document39 pageslec2manoj kumar GNo ratings yet
- Lec 20Document29 pagesLec 20shubhamNo ratings yet
- GeagergaegDocument3 pagesGeagergaegAnfernee LoNo ratings yet
- lec8Document39 pageslec8manoj kumar GNo ratings yet
- Lec 23Document13 pagesLec 23sixfacerajNo ratings yet
- Lec19 PDFDocument22 pagesLec19 PDFdurgaraokamireddyNo ratings yet
- Lec 18Document6 pagesLec 18saswat sahooNo ratings yet
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 pagesAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaNo ratings yet
- lec9Document24 pageslec9manoj kumar GNo ratings yet
- Lec5 PDFDocument8 pagesLec5 PDFKeerthiNo ratings yet
- Complex Analysis Prof. P. A. S. Sree Krishna Department of Mathematics Indian Institute of Technology, GuwahatiDocument18 pagesComplex Analysis Prof. P. A. S. Sree Krishna Department of Mathematics Indian Institute of Technology, GuwahatiManjunath TCNo ratings yet
- Lec 8Document11 pagesLec 8Ravi KumarNo ratings yet
- Lec 2Document10 pagesLec 2Pramod KulkarniNo ratings yet
- Lec 1Document20 pagesLec 1shankyforuNo ratings yet
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 pagesComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kNo ratings yet
- Lec 1Document26 pagesLec 1Tahir AbbasNo ratings yet
- Structural DynamicsDocument16 pagesStructural DynamicsSushanta Kumar RoyNo ratings yet
- TheFourierTransformAndItsApplications Lecture04Document16 pagesTheFourierTransformAndItsApplications Lecture04Ni PeterNo ratings yet
- Lec 4Document24 pagesLec 4Vinod KSNo ratings yet
- Lec5 PDFDocument40 pagesLec5 PDFEliNo ratings yet
- Instructor (Brad Osgood) :there We Go. All Right, The Exams - Remember The Exams? IDocument10 pagesInstructor (Brad Osgood) :there We Go. All Right, The Exams - Remember The Exams? IElisée NdjabuNo ratings yet
- Lec 43Document21 pagesLec 43Pramod KulkarniNo ratings yet
- NPTEL FEM Lec3Document42 pagesNPTEL FEM Lec3EliNo ratings yet
- Lec 17Document29 pagesLec 17shubhamNo ratings yet
- 4 FunctionsDocument10 pages4 Functionssap6370No ratings yet
- Lec 2Document13 pagesLec 2RAHUL NARANGNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13Document23 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 13mahendranNo ratings yet
- Recursion DemystifiedDocument26 pagesRecursion DemystifiedmohitNo ratings yet
- Instructor (Brad Osgood) : Here We Go. All Right. The Exams, You Remember The ExamsDocument10 pagesInstructor (Brad Osgood) : Here We Go. All Right. The Exams, You Remember The ExamsElisée NdjabuNo ratings yet
- Lec4 PDFDocument21 pagesLec4 PDFElisée NdjabuNo ratings yet
- Lec 4Document30 pagesLec 4shubhamNo ratings yet
- Lec 18Document19 pagesLec 18Abhijit NathNo ratings yet
- Dynamic Response For Continuous SystemsDocument18 pagesDynamic Response For Continuous SystemsDarsHan MoHan0% (1)
- Lec20 PDFDocument24 pagesLec20 PDFmahendranNo ratings yet
- lec4Document43 pageslec4manoj kumar GNo ratings yet
- Instructor (Brad Osgood) :all Right. Let Me Remind You of The Exam Information As IDocument8 pagesInstructor (Brad Osgood) :all Right. Let Me Remind You of The Exam Information As IElisée NdjabuNo ratings yet
- Finite Element Method Prof. C. S. Upadhyay Indian Institute of Technology, KanpurDocument22 pagesFinite Element Method Prof. C. S. Upadhyay Indian Institute of Technology, KanpurabimanaNo ratings yet
- Lec 4Document21 pagesLec 4lokendra singhNo ratings yet
- Integration: DX - (But See Footnote 1.) The Integral Operator Operates On ADocument5 pagesIntegration: DX - (But See Footnote 1.) The Integral Operator Operates On ASunita SinghNo ratings yet
- The Classes: P P P Pandnp NP NP NPDocument11 pagesThe Classes: P P P Pandnp NP NP NPtheresa.painterNo ratings yet
- lec5Document15 pageslec5manoj kumar GNo ratings yet
- Preface: Calculus IIDocument8 pagesPreface: Calculus IIIR Ika EtyEtyka DoraNo ratings yet
- Lec39 PDFDocument24 pagesLec39 PDFdanielNo ratings yet
- Lec 31Document21 pagesLec 31Elisée NdjabuNo ratings yet
- Lec 15Document27 pagesLec 15shubhamNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14Document21 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 14mahendranNo ratings yet
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDocument12 pagesInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuNo ratings yet
- Lec 13Document13 pagesLec 13shailiayushNo ratings yet
- Introduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19Document23 pagesIntroduction To Finite Element Method Dr. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, Madras Lecture - 19mahendranNo ratings yet
- Finite Element Method Mod-3 Lec-2Document20 pagesFinite Element Method Mod-3 Lec-2PSINGH02No ratings yet
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 pagesMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesNo ratings yet
- Lec 59Document21 pagesLec 59Elisée NdjabuNo ratings yet
- Lec40 PDFDocument23 pagesLec40 PDFpothirajNo ratings yet
- Lec 6Document17 pagesLec 6Dolly SinghNo ratings yet
- Lec 6Document22 pagesLec 6Srikar ArcheryNo ratings yet
- Lec14 PDFDocument21 pagesLec14 PDFAbhishek AroraNo ratings yet
- Lec 8Document13 pagesLec 8Avril PizzaNo ratings yet
- Lec 12Document12 pagesLec 12Seshan SahooNo ratings yet
- Epsilon Delta ProofsDocument16 pagesEpsilon Delta Proofsmcamazigh100% (1)
- Week_04Document5 pagesWeek_04manoj kumar GNo ratings yet
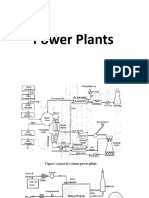
- Power PlantsDocument12 pagesPower Plantsmanoj kumar GNo ratings yet
- Declaration of Competing InterestsDocument1 pageDeclaration of Competing Interestsmanoj kumar GNo ratings yet
- MainDocument21 pagesMainmanoj kumar GNo ratings yet
- Bio Reactor Land Fills-Impart-Km4Document24 pagesBio Reactor Land Fills-Impart-Km4manoj kumar GNo ratings yet
- 1 s2.0 S2213956720300578 MainDocument13 pages1 s2.0 S2213956720300578 Mainmanoj kumar GNo ratings yet
- FluidpowerintroductionDocument32 pagesFluidpowerintroductionmanoj kumar GNo ratings yet
- Waste Disposal Options-Imp-Km1Document40 pagesWaste Disposal Options-Imp-Km1manoj kumar GNo ratings yet
- Leachate Treatment-Km-Impart-Km5Document53 pagesLeachate Treatment-Km-Impart-Km5manoj kumar GNo ratings yet
- Advances in MetrologyDocument40 pagesAdvances in Metrologymanoj kumar GNo ratings yet
- Lecture 2 LetteringDocument25 pagesLecture 2 Letteringmanoj kumar GNo ratings yet
- Basics of MetrologyDocument37 pagesBasics of Metrologymanoj kumar GNo ratings yet
- Cycloid and InvoluteDocument1 pageCycloid and Involutemanoj kumar GNo ratings yet
- Troubleshooting and ApplicationsDocument12 pagesTroubleshooting and Applicationsmanoj kumar GNo ratings yet
- Projection of PointsDocument39 pagesProjection of Pointsmanoj kumar GNo ratings yet
- (K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)Document389 pages(K. Rathnam) A First Course in Engineering Drawing (B-Ok - Xyz)manoj kumar G100% (1)
- Item Analysis: Hinatuan National Comprehensive High SchoolDocument2 pagesItem Analysis: Hinatuan National Comprehensive High SchoolRex MartinezNo ratings yet
- Deploying Swagger-Enabled Endpoints With Websphere Liberty in AixDocument8 pagesDeploying Swagger-Enabled Endpoints With Websphere Liberty in AixHariharan SundarNo ratings yet
- Philippine DramaDocument37 pagesPhilippine DramaSir NajNo ratings yet
- Japanese For All Occasions The Right Word at The Right TimeDocument251 pagesJapanese For All Occasions The Right Word at The Right TimeMaiteNo ratings yet
- Final Exam Preview 2019Document2 pagesFinal Exam Preview 2019bobNo ratings yet
- Adobe FormDocument2 pagesAdobe FormSara IuoarhgamNo ratings yet
- Chinmay DeshpandeDocument5 pagesChinmay DeshpandeChinmay DeshpandeNo ratings yet
- 1 Hobbies Vocabulary Esl Word Search Puzzle Worksheets For KidsDocument6 pages1 Hobbies Vocabulary Esl Word Search Puzzle Worksheets For KidsSemanur YURT0% (1)
- c1927197 PDFDocument115 pagesc1927197 PDFAndrés DuqueNo ratings yet
- Chapter 2 DBADocument36 pagesChapter 2 DBAEsayass mollaNo ratings yet
- A Review of Listening Skills in Language LearningDocument9 pagesA Review of Listening Skills in Language Learning29Ni Made Sri Suartini XI MIPA 7No ratings yet
- Joanna Blake - Routes To Child Language - Evolutionary and Developmental Precursors (2000)Document293 pagesJoanna Blake - Routes To Child Language - Evolutionary and Developmental Precursors (2000)Douglas DíazNo ratings yet
- MozillaDocument204 pagesMozillaoralebyteNo ratings yet
- PS2® To Usb Mouse Translator Hardware DiagramDocument10 pagesPS2® To Usb Mouse Translator Hardware Diagramjhenriqueh100% (1)
- Vdocuments - MX - Bipolar Princess Meets Cold Prince1 PDFDocument976 pagesVdocuments - MX - Bipolar Princess Meets Cold Prince1 PDFmichelle alampayanNo ratings yet
- Test 6-Used To Question TagDocument2 pagesTest 6-Used To Question TagBianca CovasaNo ratings yet
- Training Evaluation Form: To Be Completed by UserDocument2 pagesTraining Evaluation Form: To Be Completed by Usersatish dhimanNo ratings yet
- DLP 4 - Writing A Precis, Abstract and Summary in Various DisciplineDocument4 pagesDLP 4 - Writing A Precis, Abstract and Summary in Various DisciplineJamin on this beetNo ratings yet
- What Is Metacognition? Author(s) : Michael E. Martinez Source: The Phi Delta Kappan, May, 2006, Vol. 87, No. 9 (May, 2006), Pp. 696-699 Published By: Phi Delta Kappa InternationalDocument5 pagesWhat Is Metacognition? Author(s) : Michael E. Martinez Source: The Phi Delta Kappan, May, 2006, Vol. 87, No. 9 (May, 2006), Pp. 696-699 Published By: Phi Delta Kappa InternationalLanguage LabNo ratings yet
- Prayer Minister Training Outline 2017 18Document57 pagesPrayer Minister Training Outline 2017 18Don boscoNo ratings yet
- Tafsir Ibn AbbasDocument789 pagesTafsir Ibn Abbascomfreek5000100% (7)
- Ielts 4.5 Listening Wk.10Document10 pagesIelts 4.5 Listening Wk.10Tran Ngoc Bao Chau 700646No ratings yet
- Stated Definition and Meaning - Collins English DictionaryDocument10 pagesStated Definition and Meaning - Collins English DictionaryKimino NawaNo ratings yet
- GRAMMAR POINTS 3rd Adol 2023 FinalDocument27 pagesGRAMMAR POINTS 3rd Adol 2023 FinalCintia SamaniegoNo ratings yet
- Els 9Document65 pagesEls 9banumamuNo ratings yet
- Sentiment Analysis Using Product Review DataDocument14 pagesSentiment Analysis Using Product Review DataGyanKrishnaNo ratings yet
- Newsletter Title: Subtitle Text HereDocument2 pagesNewsletter Title: Subtitle Text HereBhavik GoradiaNo ratings yet