Download as pdf or txt
You might also like
- 8086 MicroprocessorDocument19 pages8086 MicroprocessorAchyut TripathiNo ratings yet
- 8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorDocument17 pages8086 Pin Diagram Here Is The Pin Diagram of 8086 MicroprocessorRakesh ChaudhuriNo ratings yet
- MIC (22415) UNIT - 1 NotesDocument17 pagesMIC (22415) UNIT - 1 NotesGaurang RaneNo ratings yet
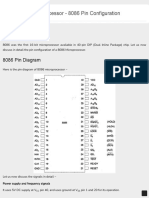
- Microprocessor - 8086 Pin ConfigurationDocument4 pagesMicroprocessor - 8086 Pin ConfigurationShahanasNo ratings yet
- U3 8086 MicroprocessorDocument10 pagesU3 8086 MicroprocessorNishant Singh ChauhanNo ratings yet
- Unit 1Document14 pagesUnit 1deeptipatra220No ratings yet
- Microprocesor 3 UnitDocument47 pagesMicroprocesor 3 UnitGanapathy RamadossNo ratings yet
- Today's Content: Microprocessor Notes Lecture #1Document15 pagesToday's Content: Microprocessor Notes Lecture #1ayushNo ratings yet
- Pin Diagram 0f 8086 Microprocessor or The Hardware Model of 8086Document21 pagesPin Diagram 0f 8086 Microprocessor or The Hardware Model of 8086Abay YeshawNo ratings yet
- 8086 MIC - Unit 1 - NotesDocument31 pages8086 MIC - Unit 1 - Notesviraj babarNo ratings yet
- Unit III 8086 Microprocessor InterfacingDocument26 pagesUnit III 8086 Microprocessor InterfacingRammanohar Lokiya100% (1)
- Microprocessor 8086 - Min and Max ModesDocument25 pagesMicroprocessor 8086 - Min and Max ModesE.VigneshNo ratings yet
- EC6504 - Microprocessor and Microcontroller Nov/Dec 2017 - KeyDocument27 pagesEC6504 - Microprocessor and Microcontroller Nov/Dec 2017 - KeyKrishaNo ratings yet
- Chapter 4 - Introduction To Intel 8086 MicroprocessorDocument12 pagesChapter 4 - Introduction To Intel 8086 MicroprocessorNaimur EshanNo ratings yet
- Features of 8086 Microprocessor:: 1. EU (Execution Unit)Document6 pagesFeatures of 8086 Microprocessor:: 1. EU (Execution Unit)Md Raton AliNo ratings yet
- MicroprocessorDocument4 pagesMicroprocessork lakshmi prasannaNo ratings yet
- MIC Chap 1 NotesDocument15 pagesMIC Chap 1 NotesSonali AhireNo ratings yet
- Unit 3 8086 Microprocessor InterfacingDocument29 pagesUnit 3 8086 Microprocessor InterfacingDere JesusNo ratings yet
- Chapter-4: Microprocessor: 8086 and Modern MicroprocessorsDocument50 pagesChapter-4: Microprocessor: 8086 and Modern MicroprocessorsPRABHAKAR MORENo ratings yet
- MPMC M1 Ktunotes - inDocument22 pagesMPMC M1 Ktunotes - inwayne29012001No ratings yet
- 2019-CPE-27 Microprocessor Assignment No 1Document12 pages2019-CPE-27 Microprocessor Assignment No 1Haalim MNo ratings yet
- Unit 1 8086 16 Bit MicroprocessorDocument17 pagesUnit 1 8086 16 Bit MicroprocessorManofwarrior100% (1)
- MPMC Unit-2 Cse ArunDocument56 pagesMPMC Unit-2 Cse ArunhtasarpnuraNo ratings yet
- Unit II 16 Bit Microprocessor Architecture 9Document37 pagesUnit II 16 Bit Microprocessor Architecture 9singhrps84100% (1)
- MPMC Unit-1Document27 pagesMPMC Unit-1downloadscribdpdfNo ratings yet
- 8085 Features, Signal DescriptionDocument13 pages8085 Features, Signal DescriptionRakesh Kumar DNo ratings yet
- Study Material Subject: Microprocessor and Microcontroller V Semester Electronics by Prof. Mrs. J. S. GawaiDocument25 pagesStudy Material Subject: Microprocessor and Microcontroller V Semester Electronics by Prof. Mrs. J. S. GawaidukeNo ratings yet
- Mic Unit 1. SelfDocument21 pagesMic Unit 1. SelfPragati DagaleNo ratings yet
- Mic Unit1Document21 pagesMic Unit1xboyxman1000No ratings yet
- Microprocessor - 8086 Pin Configuration - TutorialspointDocument4 pagesMicroprocessor - 8086 Pin Configuration - TutorialspointSadikuzzaman lalinNo ratings yet
- Department of Information and Communication Technology Course: ICT-3205: Computer Architecture and MicroprocessorDocument12 pagesDepartment of Information and Communication Technology Course: ICT-3205: Computer Architecture and MicroprocessorBashar AhmedNo ratings yet
- Unit-I: 8-Bit MicroprocessorsDocument55 pagesUnit-I: 8-Bit MicroprocessorsAASTHA KIETNo ratings yet
- (2019-CPE-28) MP Assignment 1Document14 pages(2019-CPE-28) MP Assignment 1Nitasha HumaNo ratings yet
- The 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceDocument37 pagesThe 8088/8086 Microprocessors and Their Memory and Input/Output InterfaceKanaan JalalNo ratings yet
- 8085 MicroprocessorDocument13 pages8085 MicroprocessorSajid Akram100% (1)
- Internal Architecture of 8085 Microprocessor: A. Control UnitDocument17 pagesInternal Architecture of 8085 Microprocessor: A. Control Unitmech mech1No ratings yet
- Microprocessor 8085Document25 pagesMicroprocessor 8085hetal_limbaniNo ratings yet
- EE6502 MPMC Two Marks With AnswerDocument10 pagesEE6502 MPMC Two Marks With Answervlsimani9110100% (1)
- Microprocessor and Micro ControllerDocument118 pagesMicroprocessor and Micro ControllerShiva ShanNo ratings yet
- 8086 Microprocessor Is An Enhanced Version of 8085microprocessor That Was Designed by Intel in 1976Document17 pages8086 Microprocessor Is An Enhanced Version of 8085microprocessor That Was Designed by Intel in 1976pradeep akellaNo ratings yet
- Unit 2 FinalDocument31 pagesUnit 2 Finalswetha bagadi it's good but how it will workNo ratings yet
- 21CS1302 - Camp - Unit 4 NotesDocument41 pages21CS1302 - Camp - Unit 4 Notespec libraryNo ratings yet
- 8086 - Microprocessor and Applications (AU-CBE, R2008)Document25 pages8086 - Microprocessor and Applications (AU-CBE, R2008)Dr. N.Shanmugasundaram75% (4)
- Unit-I (8086) : Microprocessor and MicrocontrollersDocument22 pagesUnit-I (8086) : Microprocessor and MicrocontrollerskesavantNo ratings yet
- Minimum Maximum ModeDocument29 pagesMinimum Maximum ModeVaibhav GodboleNo ratings yet
- Unit - I: Department of Ece 1Document11 pagesUnit - I: Department of Ece 1Su YeeNo ratings yet
- Internal Architecture of 8086: Central Processing Unit or and Output Circuitry or I/O andDocument8 pagesInternal Architecture of 8086: Central Processing Unit or and Output Circuitry or I/O andAmandeep Singh KheraNo ratings yet
- 2-16 Bit Microprocessor 8086Document20 pages2-16 Bit Microprocessor 8086afzal_a75% (4)
- Research Paper On 8086 MicroprocessorDocument7 pagesResearch Paper On 8086 Microprocessorfzqs7g1d100% (1)
- Microprocessor 8086Document9 pagesMicroprocessor 8086pranalikatad2585No ratings yet
- Pin configuration of 8086Document12 pagesPin configuration of 8086Sasi BhushanNo ratings yet
- Microprocessor and Micro Controller Lecture NotesDocument118 pagesMicroprocessor and Micro Controller Lecture NotesSivanesh SK50% (2)
- 8085 MicroprocessorDocument38 pages8085 MicroprocessorPrateek PandeyNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Advantages and Disadvantages of ComputersDocument4 pagesAdvantages and Disadvantages of ComputersCollinsNo ratings yet
- Instructions of MX2Document22 pagesInstructions of MX2engineering eyelashesNo ratings yet
- Acronis #CyberFit Cloud Sales Fundamentals 2022Document140 pagesAcronis #CyberFit Cloud Sales Fundamentals 2022Manuel SalazarNo ratings yet
- Replies of Pre-BidDocument66 pagesReplies of Pre-BidAZM pallab chowdhuryNo ratings yet
- FAT32 File System SpecificationDocument34 pagesFAT32 File System SpecificationCrend King100% (3)
- Memory TypesDocument4 pagesMemory TypesPaulo LimaNo ratings yet
- Analysis of Algorithms: Dr. Muhammad HabibDocument16 pagesAnalysis of Algorithms: Dr. Muhammad HabibsufyanmuzaffarNo ratings yet
- PM Debug InfoDocument16 pagesPM Debug Infocarlos cortezNo ratings yet
- MT6580 Android ScatterDocument7 pagesMT6580 Android ScatterDj MvitNo ratings yet
- Versity VSM Data Sheet PDFDocument2 pagesVersity VSM Data Sheet PDFngole ngoleNo ratings yet
- Glofa GM7Document30 pagesGlofa GM7luis palaciosNo ratings yet
- MCQs - IT in BusinessDocument6 pagesMCQs - IT in Businessdaminnigrover4663No ratings yet
- m01 Connect Internal HardwareDocument64 pagesm01 Connect Internal Hardwaretewachew mitikeNo ratings yet
- 1.3 Check Your ProgressDocument16 pages1.3 Check Your ProgressArlyn ElsiNo ratings yet
- ComputerDocument5 pagesComputermehran kabirNo ratings yet
- 3PLC Data TypesDocument22 pages3PLC Data TypesJayesh GunawardanaNo ratings yet
- ICT - G7 - q1 - Mod1 - Introduction To ICT - With Answer Key EditedDocument39 pagesICT - G7 - q1 - Mod1 - Introduction To ICT - With Answer Key EditedJose Garcesa Alfonga Jr.100% (4)
- Unified Patents Inc. v. Novocrypt LLC, IPR2015-01606, Paper (PTAB Dec. 22, 2015) (ID)Document20 pagesUnified Patents Inc. v. Novocrypt LLC, IPR2015-01606, Paper (PTAB Dec. 22, 2015) (ID)Shawn AmbwaniNo ratings yet
- Unit - 4Document70 pagesUnit - 4itsrishabh0703No ratings yet
- Setting Up DB2 With TSMDocument5 pagesSetting Up DB2 With TSMprakash_6849No ratings yet
- GC Computer (Eng)Document121 pagesGC Computer (Eng)shqtkxh2No ratings yet
- Computer Awareness Question BankDocument83 pagesComputer Awareness Question BankDev Dutt SharmaNo ratings yet
- An Operating System MBADocument15 pagesAn Operating System MBAShwetaNo ratings yet
- Chapter 9: Virtual Memory: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionDocument43 pagesChapter 9: Virtual Memory: Silberschatz, Galvin and Gagne ©2013 Operating System Concepts - 9 EditionnitishaNo ratings yet
- CAF Marketing PlanDocument6 pagesCAF Marketing PlanKhurram ShahzadNo ratings yet
- Larktech Slackware Linux Installation Guide: System RequirementsDocument24 pagesLarktech Slackware Linux Installation Guide: System Requirementslark77No ratings yet
- Verilog For Modeling - Module 9bDocument27 pagesVerilog For Modeling - Module 9bbenny.mao.shNo ratings yet
- Computer Applications: CLASS IX (Code 165) (2022-23) Learning OutcomesDocument6 pagesComputer Applications: CLASS IX (Code 165) (2022-23) Learning OutcomesDivyanshi Pandey562536No ratings yet
- Understanding Operating Systems Sixth EditionDocument47 pagesUnderstanding Operating Systems Sixth EditionBSIT3_IT116No ratings yet
- Lab 08Document13 pagesLab 08aducbkfetNo ratings yet