Download as pdf or txt
You might also like
- Mas-I Formula Sheet PDFDocument7 pagesMas-I Formula Sheet PDFUngoliant101No ratings yet
- Basic Statistics For Business and Economics Canadian 6th Edition Lind Solutions ManualDocument22 pagesBasic Statistics For Business and Economics Canadian 6th Edition Lind Solutions Manualkathylutzrogcbxditz100% (27)
- Marketing+Analytics+-+Lp Suraksha VarshneyDocument13 pagesMarketing+Analytics+-+Lp Suraksha VarshneySuraksha VarshneyNo ratings yet
- 62:171 Introduction To Statistics: Course Outline Fall 2017Document5 pages62:171 Introduction To Statistics: Course Outline Fall 2017Sarg0nNo ratings yet
- Trial - EUL-DCH Load BalancingDocument10 pagesTrial - EUL-DCH Load BalancingkafleNo ratings yet
- Resource Utilization Sheet - 1Document17 pagesResource Utilization Sheet - 1Ujjal RegmiNo ratings yet
- Everything You Always Wanted To Know About Well Test Analysis But Were Afraid To AskDocument44 pagesEverything You Always Wanted To Know About Well Test Analysis But Were Afraid To AskDanish MehmoodNo ratings yet
- CE168P-2 S-Curve SampleDocument4 pagesCE168P-2 S-Curve SampleCat BugNo ratings yet
- Week 3 Quizsheet 2 BDocument3 pagesWeek 3 Quizsheet 2 BElizabeth Tindle-EngelmannNo ratings yet
- Linearity, Linear Range, Sensi - Vity: Methods Ability To Obtain SignalsDocument14 pagesLinearity, Linear Range, Sensi - Vity: Methods Ability To Obtain SignalsChira MariaNo ratings yet
- Workshop 5 - Multicollinearity and Functional FormDocument77 pagesWorkshop 5 - Multicollinearity and Functional FormDoan Anh TuanNo ratings yet
- Civil Engineering Construction Project (Ecm 317) : Group MembersDocument28 pagesCivil Engineering Construction Project (Ecm 317) : Group MembersSafi HusseinNo ratings yet
- Truss & Purlins Layout: A B C D H G F EDocument1 pageTruss & Purlins Layout: A B C D H G F EcyrineNo ratings yet
- Strategy MapsDocument2 pagesStrategy Mapsprincemech2004No ratings yet
- Differential Plot: Mean Size FractionDocument2 pagesDifferential Plot: Mean Size FractionZain Ali ZingNo ratings yet
- The Pioneer - August - September 07Document20 pagesThe Pioneer - August - September 07nilnilen2009No ratings yet
- E-Brosure Water TerraceDocument20 pagesE-Brosure Water TerraceM Rifqi PT. Ryuu IndustryNo ratings yet
- Time Series Graphs of Weekday/Weekend For The Months of October, November, DecemberDocument20 pagesTime Series Graphs of Weekday/Weekend For The Months of October, November, DecemberYASEEN AKBARNo ratings yet
- Final 2Document1 pageFinal 2MJ CARVAJALNo ratings yet
- 2 Depreciation Comprehensive - ExampleDocument8 pages2 Depreciation Comprehensive - ExampleMr HeraclitusNo ratings yet
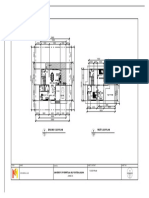
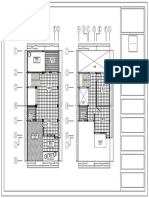
- Denah Pondasi Revisi 2Document1 pageDenah Pondasi Revisi 2Dion IndrazNo ratings yet
- 1.6 Maintenance Schedule Matrix 12000 HRS: 500 To 12000 Operating HoursDocument6 pages1.6 Maintenance Schedule Matrix 12000 HRS: 500 To 12000 Operating HoursTony KassabNo ratings yet
- So-Ing-p01-Kbr Informe Esp Part 5Document109 pagesSo-Ing-p01-Kbr Informe Esp Part 5VeroNo ratings yet
- Bajaj Auto - BIDADocument26 pagesBajaj Auto - BIDASandeep SagarNo ratings yet
- Bar Graph BanyakDocument2 pagesBar Graph BanyaktwinkleterryNo ratings yet
- 1805-0301 FentanylDocument1 page1805-0301 FentanylGreg FontanaNo ratings yet
- Movilor DC MotorDocument4 pagesMovilor DC MotorNurhayadi AmankNo ratings yet
- QDX 8 - PX: Chart Title Chart TitleDocument2 pagesQDX 8 - PX: Chart Title Chart TitleFlor CondoriNo ratings yet
- SLIIT Lecture 8 Work Example Sheets To PrintDocument6 pagesSLIIT Lecture 8 Work Example Sheets To PrintV. OlukaNo ratings yet
- Working Space Printer 2 Printer 3 Router RackDocument6 pagesWorking Space Printer 2 Printer 3 Router RackSM MecregNo ratings yet
- Earum Pharmaceuticals Limited - TerminalwisesummaryDocument38 pagesEarum Pharmaceuticals Limited - TerminalwisesummaryBhavin SagarNo ratings yet
- Layout Ruko RDocument3 pagesLayout Ruko RChandra ChandraNo ratings yet
- Syed Mansoor ShahDocument4 pagesSyed Mansoor ShahMansoor AliNo ratings yet
- C:/Users/USER/Desktop/LAPORAN KP/download - PNGDocument1 pageC:/Users/USER/Desktop/LAPORAN KP/download - PNGJesica SuyantoNo ratings yet
- Maguichus ExcelDocument2 pagesMaguichus ExcelmaguilaMAGDITANo ratings yet
- T. Marhaendrajana, Schlumberger T.A. Blasingame, Texas A&M UDocument33 pagesT. Marhaendrajana, Schlumberger T.A. Blasingame, Texas A&M Usaladinayubi1234No ratings yet
- Week8 Assignment8 Solutions PDFDocument5 pagesWeek8 Assignment8 Solutions PDFAnonymous 2sYMGmw18aNo ratings yet
- S Curve in ExcelDocument6 pagesS Curve in ExcelnsingobNo ratings yet
- 21pgdm066 - Harshita Mishra - Eco 03Document5 pages21pgdm066 - Harshita Mishra - Eco 03Harshita MishraNo ratings yet
- CS ForecastingDocument4 pagesCS ForecastingDe Gala ShailynNo ratings yet
- Xerox: Series1 Series2 Series3 Series1 Series2 Series3Document2 pagesXerox: Series1 Series2 Series3 Series1 Series2 Series3mina100% (2)
- Brochure Cluster - The Mahogany Residence (Final) PDFDocument21 pagesBrochure Cluster - The Mahogany Residence (Final) PDFTkko riastoNo ratings yet
- Graph 3 PipesDocument4 pagesGraph 3 PipesPriyankNo ratings yet
- Graph 3 PipesDocument4 pagesGraph 3 PipesPriyankNo ratings yet
- Ult Cap FondDocument1 pageUlt Cap FondAW EfendiNo ratings yet
- Stroke CalculationDocument3 pagesStroke Calculationinnu.gamingNo ratings yet
- Grafik Pipa Besar Pipa Besar: V (Laju Alir)Document2 pagesGrafik Pipa Besar Pipa Besar: V (Laju Alir)Dhyrana ShailaNo ratings yet
- SAJIDDocument14 pagesSAJIDSadi MohammedNo ratings yet
- Cost Bread Down For Development of (Code of Practice) : Total Contingency 10%Document1 pageCost Bread Down For Development of (Code of Practice) : Total Contingency 10%Alemayehu DargeNo ratings yet
- Construction Industry AnalysisDocument132 pagesConstruction Industry AnalysisEleanorXuNo ratings yet
- Af 160145Document4 pagesAf 160145nurinNo ratings yet
- Game BalancingDocument5 pagesGame Balancingiphone itiwNo ratings yet
- Book 3Document2 pagesBook 3Nishu SinhaNo ratings yet
- Peta EntikongDocument1 pagePeta EntikongjagadNo ratings yet
- Totale50 OTI Network StatsDocument1 pageTotale50 OTI Network StatsFranco ScaccoNo ratings yet
- Cumulative CostDocument1 pageCumulative CostadlenaNo ratings yet
- Pit FinalDocument1 pagePit FinalRoberto siberoni llajaNo ratings yet
- Piura CuadrosDocument8 pagesPiura CuadrosDante NinaNo ratings yet
- Cost Benefit AnalysisDocument19 pagesCost Benefit AnalysisGauri chughNo ratings yet
- Nilai Cacah Terhadap Jarak Sumber RadiasiDocument4 pagesNilai Cacah Terhadap Jarak Sumber Radiasikrisna wijayaNo ratings yet
- GC2Document2 pagesGC2Mohammad Rezza PachruraziNo ratings yet
- Método Costo Inicial, Valor de Salvingreso AnualDocument8 pagesMétodo Costo Inicial, Valor de Salvingreso AnualJose Elias Ojeda HerreraNo ratings yet
- unit 3 discrete mathsDocument13 pagesunit 3 discrete mathsss tNo ratings yet
- unit 4Document20 pagesunit 4ss tNo ratings yet
- unit 1Document10 pagesunit 1ss tNo ratings yet
- MCSL044 Section 4 CRCDocument10 pagesMCSL044 Section 4 CRCss tNo ratings yet
- Sem-III-Study-materialDocument165 pagesSem-III-Study-materialss tNo ratings yet
- MCSL044 Section 2 CRCDocument16 pagesMCSL044 Section 2 CRCss tNo ratings yet
- Binomial and Poission Distribution 6Document34 pagesBinomial and Poission Distribution 6ss tNo ratings yet
- Unit-11 Small Sample TestDocument28 pagesUnit-11 Small Sample Testss tNo ratings yet
- MCSL044 Section 5 CRCDocument11 pagesMCSL044 Section 5 CRCss tNo ratings yet
- Unit 12 Chi Aquare and F TestsDocument18 pagesUnit 12 Chi Aquare and F Testsss tNo ratings yet
- Session 9Document27 pagesSession 9ss tNo ratings yet
- Block 2 Consumer Behaviour and The Demand Theory: Basic Concepts and FrameworkDocument156 pagesBlock 2 Consumer Behaviour and The Demand Theory: Basic Concepts and Frameworkss tNo ratings yet
- Assignment On Basic Econometrics UECO/UMEC: 605Document1 pageAssignment On Basic Econometrics UECO/UMEC: 605ss tNo ratings yet
- Session 10Document30 pagesSession 10ss tNo ratings yet
- Chapter One Nature and Scope of Economics: June 2021Document81 pagesChapter One Nature and Scope of Economics: June 2021ss tNo ratings yet
- Sampling DistributionDocument6 pagesSampling Distributionss tNo ratings yet
- Chapter Six Theory of Consumer Behaviour: February 2021Document79 pagesChapter Six Theory of Consumer Behaviour: February 2021ss tNo ratings yet
- Markov ChainDocument28 pagesMarkov ChainAndrea Spencer100% (1)
- Continuous Probability DistributionsDocument3 pagesContinuous Probability DistributionsLuke CruzNo ratings yet
- Statistics and Probability Theory MTH-262Document38 pagesStatistics and Probability Theory MTH-262Rafi FarhanNo ratings yet
- 3 ProbabilityDocument25 pages3 ProbabilitySri SakthyNo ratings yet
- Binomial Distributions & ProblemsDocument2 pagesBinomial Distributions & ProblemsEunnicePanaliganNo ratings yet
- BPT-Probability-binomia Distribution, Poisson Distribution, Normal Distribution and Chi Square TestDocument41 pagesBPT-Probability-binomia Distribution, Poisson Distribution, Normal Distribution and Chi Square TestAjju NagarNo ratings yet
- 20 Binomial DistributionDocument14 pages20 Binomial Distributionapi-299265916No ratings yet
- Practice MidtermDocument4 pagesPractice MidtermAnonymous 9qJCv5mC0No ratings yet
- EENG415 Power System Reliability Probability Theory: Lecture # 2Document78 pagesEENG415 Power System Reliability Probability Theory: Lecture # 2k xcd9No ratings yet
- Monte Carlo My Presentation PDFDocument11 pagesMonte Carlo My Presentation PDFRASHMINo ratings yet
- Unit 7 PDFDocument15 pagesUnit 7 PDFUdhaya KumarNo ratings yet
- Amity MBA Chapter 5 ProbabilityDocument55 pagesAmity MBA Chapter 5 ProbabilityNikhil YadavNo ratings yet
- 5 Normal DistributionDocument34 pages5 Normal DistributionLa JeNo ratings yet
- 18MAB204T - Module-1-Lecture NotesDocument39 pages18MAB204T - Module-1-Lecture NotesGANGISETTY RAJ CHARANNo ratings yet
- Emt 3202 PresentationDocument56 pagesEmt 3202 Presentationelio100% (1)
- PQT New Syllabus Oliver Anna UniversityDocument27 pagesPQT New Syllabus Oliver Anna UniversityRajajaes HahaehaNo ratings yet
- Probability Theory NotesDocument7 pagesProbability Theory NotesPratik J.No ratings yet
- Stat Prob - Q3 - Week 5 6 - Module 4 - Sampling Distribution Its Mean and Variance - For ReproductionDocument26 pagesStat Prob - Q3 - Week 5 6 - Module 4 - Sampling Distribution Its Mean and Variance - For ReproductionCharles Alexander J. SandhuNo ratings yet
- Assignment 1: Descriptive Statistics (10 Marks)Document4 pagesAssignment 1: Descriptive Statistics (10 Marks)Malik Faizan100% (1)
- Normal and Exponential Distribution: by Abhijeet SalunkeDocument21 pagesNormal and Exponential Distribution: by Abhijeet SalunkeAsh KNo ratings yet
- Stat 700 HW3 Solutions, 10/9/09Document4 pagesStat 700 HW3 Solutions, 10/9/09Jhon Eduwin Maya OrozcoNo ratings yet
- Chapter 6 The Normal Distribution Other Continuous DistributionsDocument66 pagesChapter 6 The Normal Distribution Other Continuous DistributionsTasya AsdigaNo ratings yet
- DSC 1371 - Chapter 07 - RV Probability DistributionsDocument10 pagesDSC 1371 - Chapter 07 - RV Probability DistributionsrdgajanayakeNo ratings yet
- Ec2 5Document26 pagesEc2 5S StanevNo ratings yet