Download as pdf or txt
You might also like
- Digital Tachometer Project ReportDocument57 pagesDigital Tachometer Project Reportcooldharap70% (10)
- Dual Axis Solar Tracking System With InverterDocument38 pagesDual Axis Solar Tracking System With InverterAman Prasad100% (2)
- Encoders and Resolvers PDFDocument5 pagesEncoders and Resolvers PDFMURTHY RAJNo ratings yet
- Emerson Mentor MP ManualDocument182 pagesEmerson Mentor MP ManualiampedrooNo ratings yet
- Digital Encoders 1.2Document6 pagesDigital Encoders 1.2controlorNo ratings yet
- Rotary Encoder PDFDocument8 pagesRotary Encoder PDFKhaled RabeaNo ratings yet
- Magnetic EncodersDocument5 pagesMagnetic EncodersGarcia F. Marcio100% (1)
- Safari - Feb 4, 2024 at 11:38 PMDocument1 pageSafari - Feb 4, 2024 at 11:38 PMsyansyncNo ratings yet
- Encoders & Resolvers:: How To Choose The Right Feedback OptionDocument5 pagesEncoders & Resolvers:: How To Choose The Right Feedback OptionAdam SmithNo ratings yet
- Motion Control Feedback DeviceDocument20 pagesMotion Control Feedback DeviceZyzerull SaadNo ratings yet
- What Are Rotary Encoders Used ForDocument11 pagesWhat Are Rotary Encoders Used ForjackNo ratings yet
- Encoder White PaperDocument9 pagesEncoder White Papersaneie99No ratings yet
- wp-2011: The Basics of How An Encoder Works: White PaperDocument2 pageswp-2011: The Basics of How An Encoder Works: White PaperAnghelo AlcaldeNo ratings yet
- WP 2011 PDFDocument2 pagesWP 2011 PDFTony K.P100% (1)
- Whitepaper EncodersDocument4 pagesWhitepaper EncodersalexNo ratings yet
- EncoderAnalyzer _ SchleichDocument8 pagesEncoderAnalyzer _ SchleichLaboratorio Recife FlateckNo ratings yet
- Danaher Encoder HandbookDocument16 pagesDanaher Encoder HandbookatifkhushnoodNo ratings yet
- EncoderDocument5 pagesEncoderAndari Dian AriestianiNo ratings yet
- Difference Between Resolver and EncoderDocument10 pagesDifference Between Resolver and EncoderMuhammad Munirul AlamNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Chapter 5c - Sensor and Actuator (Autosaved)Document49 pagesChapter 5c - Sensor and Actuator (Autosaved)Syahmi AkmalNo ratings yet
- wp-2000: Key Considerations For Selecting Digital Encoder OutputsDocument3 pageswp-2000: Key Considerations For Selecting Digital Encoder Outputsrmorenodx4587No ratings yet
- Module - 4 Digital and Intelligent Sensors: Position EncodersDocument23 pagesModule - 4 Digital and Intelligent Sensors: Position EncodersJnanavi B ANo ratings yet
- Digital Transducers and Its Application: Mr. Sibu Thomas, Ms. Nishi Shahnaj HaiderDocument10 pagesDigital Transducers and Its Application: Mr. Sibu Thomas, Ms. Nishi Shahnaj HaiderAnnu MauryaNo ratings yet
- EE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransducerDocument18 pagesEE17401-Measurements and Instrumentation Unit - V: Optical Encoder Type Digital TransduceravsNo ratings yet
- ENCODER General-Installation-Wiring-GuideDocument16 pagesENCODER General-Installation-Wiring-GuideNirav PatelNo ratings yet
- Tdoct0654p EngDocument52 pagesTdoct0654p Englas.quangduyNo ratings yet
- Absolute Encoders Principle of OperationDocument2 pagesAbsolute Encoders Principle of OperationSakhawat Hossain RonyNo ratings yet
- Digital TachometerDocument12 pagesDigital TachometerHariniNo ratings yet
- Single-Turn Encoders Vs Multi-Turn Encoders - DynaparDocument4 pagesSingle-Turn Encoders Vs Multi-Turn Encoders - DynaparMozhdeh HeydariNo ratings yet
- Angle of Attack Sensor Based On Arduino UNO MicrocontrollerDocument4 pagesAngle of Attack Sensor Based On Arduino UNO MicrocontrollerNaji YakzanNo ratings yet
- W - Defa2349 Uso de EncodersDocument28 pagesW - Defa2349 Uso de EncodersLuispinedaNo ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- Encoder (Lab 2)Document15 pagesEncoder (Lab 2)brasengan6No ratings yet
- Ch5 - Sensor and ActuatorDocument48 pagesCh5 - Sensor and ActuatorcactuswillsaNo ratings yet
- Rotary Encoder Training MaterialDocument30 pagesRotary Encoder Training MaterialLuckyboybk FCNo ratings yet
- Ramdan - 18010040 - Chapter 2 - Exercises - 2021Document3 pagesRamdan - 18010040 - Chapter 2 - Exercises - 2021Sandi EimiNo ratings yet
- Design and Selection of CNC Feedback DevicesDocument18 pagesDesign and Selection of CNC Feedback Devicescharles ondiekiNo ratings yet
- Optical Encoder For Motion Control Through ArduinoDocument4 pagesOptical Encoder For Motion Control Through ArduinoMary LongNo ratings yet
- 505 - Lec 03 PDFDocument23 pages505 - Lec 03 PDFUdara DissanayakeNo ratings yet
- Chapter One InstruDocument17 pagesChapter One Instrubahiru meleseNo ratings yet
- S&A Optical Encoders PDFDocument34 pagesS&A Optical Encoders PDFNiravNo ratings yet
- اردوينو pidDocument4 pagesاردوينو pidgadaNo ratings yet
- Encoder CatalogDocument24 pagesEncoder CatalogCao Minh TuấnNo ratings yet
- 1735-SCHLEICH_EN_brochure_EncoderAnalyzerDocument7 pages1735-SCHLEICH_EN_brochure_EncoderAnalyzerLaboratorio Recife FlateckNo ratings yet
- Project Synopsis 2Document21 pagesProject Synopsis 2shailesh devaneNo ratings yet
- For 4Document5 pagesFor 4Neelay BeraNo ratings yet
- Sensors and Actuators 1Document37 pagesSensors and Actuators 1Ansh PanchalNo ratings yet
- Embedded Systems Unit 2 Part 3-1Document50 pagesEmbedded Systems Unit 2 Part 3-1Donthula LayaNo ratings yet
- 01 EncoderDocument4 pages01 EncoderAngel ChicchonNo ratings yet
- Low Power & Area Efficient Layout Analysis of Cmos EncoderDocument5 pagesLow Power & Area Efficient Layout Analysis of Cmos EncoderSamiksha GautamNo ratings yet
- IOT - MOD - 3 - NotesDocument7 pagesIOT - MOD - 3 - NotesAnnabelleNo ratings yet
- ProjectDocument28 pagesProjectSatyanarayana GurramNo ratings yet
- Block Diagram Sorting Using Udm and IrDocument6 pagesBlock Diagram Sorting Using Udm and IrMANOJ KNo ratings yet
- Agilent AEDS-962x For 300 LPI Ultra Small Optical Encoder ModulesDocument11 pagesAgilent AEDS-962x For 300 LPI Ultra Small Optical Encoder ModulesLucio UbelluNo ratings yet
- Unit 2 Part 3Document50 pagesUnit 2 Part 3Anusha ChilupuriNo ratings yet
- Rotary Encoder PDFDocument12 pagesRotary Encoder PDFRahul Soren100% (1)
- Measuring Systems SIMODRIVE Sensor: 8/2 Built-On Optoelectronic Rotary EncodersDocument10 pagesMeasuring Systems SIMODRIVE Sensor: 8/2 Built-On Optoelectronic Rotary EncodersUlfran MedinaNo ratings yet
- Eye BlinkDocument31 pagesEye BlinkPoorva Gupta67% (3)
- Embedded Systems Slides FinalDocument349 pagesEmbedded Systems Slides FinalAyush SinghNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- EncoderAnalyzer _ SchleichDocument8 pagesEncoderAnalyzer _ SchleichLaboratorio Recife FlateckNo ratings yet
- CNC Services Northwest - Encoder Test FixtureDocument5 pagesCNC Services Northwest - Encoder Test FixtureLaboratorio Recife FlateckNo ratings yet
- Design of A Simpler Ampere-HourmeterDocument7 pagesDesign of A Simpler Ampere-HourmeterLaboratorio Recife FlateckNo ratings yet
- Olympus 38dl Plus Specifications Spec SheetDocument12 pagesOlympus 38dl Plus Specifications Spec SheetLaboratorio Recife FlateckNo ratings yet
- Fuji IGBT Select GuideDocument35 pagesFuji IGBT Select GuideLaboratorio Recife FlateckNo ratings yet
- En - STM32G4-WDG TIMERS-General Purpose Timer GPTIMDocument91 pagesEn - STM32G4-WDG TIMERS-General Purpose Timer GPTIMnorbertscribdNo ratings yet
- CatalogDocument34 pagesCatalogRamiro Mamani QuispeNo ratings yet
- Arduino Mechatronics Manual 0Document31 pagesArduino Mechatronics Manual 0imranNo ratings yet
- Alarm AcoposDocument123 pagesAlarm AcoposMohammad MorassaeiNo ratings yet
- EL5101 - Incremental Encoder Interface: Position Measurement Position Measurement Position MeasurementDocument2 pagesEL5101 - Incremental Encoder Interface: Position Measurement Position Measurement Position MeasurementGenivaldo Luiz de CarvalhoNo ratings yet
- Atv61 Installation ManualDocument47 pagesAtv61 Installation ManualPop-Coman SimionNo ratings yet
- PR Encoders For Servo Drives ID208922 enDocument119 pagesPR Encoders For Servo Drives ID208922 enVictor RazoNo ratings yet
- Delta-Sv Ba 300 ManualDocument578 pagesDelta-Sv Ba 300 ManualbrunoNo ratings yet
- Lab 9Document13 pagesLab 9Hassaan SaeedNo ratings yet
- Dm00691525 Position Control of A Threephase Permanent Magnet Motor Using Xcubemcsdk or Xcubemcsdkful StmicroelectronicsDocument22 pagesDm00691525 Position Control of A Threephase Permanent Magnet Motor Using Xcubemcsdk or Xcubemcsdkful StmicroelectronicsDaniel MuñozNo ratings yet
- Sinamics V90Document53 pagesSinamics V90Zay Yar MyintNo ratings yet
- COMBIAC0 ACE0 2uc DatasheetDocument4 pagesCOMBIAC0 ACE0 2uc Datasheetguo WillNo ratings yet
- EncoderDocument3 pagesEncoderbuva034No ratings yet
- Robotics Unit-5Document64 pagesRobotics Unit-5S19IT1215 HarshithaNo ratings yet
- EncoderDocument56 pagesEncoderRefaat RaslanNo ratings yet
- Encoder Basics: Output Signals of Incremental EncodersDocument34 pagesEncoder Basics: Output Signals of Incremental EncodersMelchor VasquezNo ratings yet
- Data Sheet Series Hwi 103 EngDocument2 pagesData Sheet Series Hwi 103 EngAmgedRashedNo ratings yet
- RMC35 Commutation and Incremental Encoder SolutionDocument5 pagesRMC35 Commutation and Incremental Encoder SolutionJunior ArroyoNo ratings yet
- PLC de Seguridad PlutoDocument36 pagesPLC de Seguridad Plutojuan carlosNo ratings yet
- Baumer HOG-10-+-FSL EN 20211102 DSDocument5 pagesBaumer HOG-10-+-FSL EN 20211102 DSNhi LinNo ratings yet
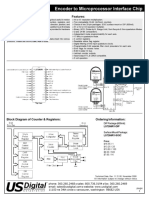
- Encoder To Microprocessor Interface Chip Chip: Features: DescriptionDocument6 pagesEncoder To Microprocessor Interface Chip Chip: Features: DescriptionserviciobsasNo ratings yet
- Accelnet Plus Module EtherCAT-AEM-Datasheet-DatasheetDocument28 pagesAccelnet Plus Module EtherCAT-AEM-Datasheet-Datasheetschnell.furiousNo ratings yet
- Encoder Basics: Output Signals of Incremental EncodersDocument40 pagesEncoder Basics: Output Signals of Incremental Encoderslin2m3No ratings yet
- LOCON 100-EDocument66 pagesLOCON 100-ERINKONo ratings yet
- Eltra EncodersDocument68 pagesEltra EncodersWill SouzaNo ratings yet
- Mc166 Kompend Kap09 eDocument180 pagesMc166 Kompend Kap09 egryzzlyNo ratings yet
- Instrukciya F5-A E H Ver.4.4 (En)Document552 pagesInstrukciya F5-A E H Ver.4.4 (En)Pedro IsmaelNo ratings yet
- Wheel Balancing MachineDocument26 pagesWheel Balancing MachinePatrick Marc Brunelle100% (2)
- 1483 E IMS 8 StorageDocument10 pages1483 E IMS 8 StorageJuan Manuel Pescador ReyesNo ratings yet