Download as pdf or txt
You might also like
- Errores Robot ReisDocument331 pagesErrores Robot ReisEsteban Capodici100% (1)
- SAP ABAP On HANA Questions and AnswersDocument21 pagesSAP ABAP On HANA Questions and AnswersSLA100% (2)
- EE 536 Quiz 2-Spring 2020-SolutionDocument4 pagesEE 536 Quiz 2-Spring 2020-SolutionubaidNo ratings yet
- Interrupts Interrupts: GoalsDocument8 pagesInterrupts Interrupts: GoalsSreekanth PagadapalliNo ratings yet
- Interrupts PDFDocument8 pagesInterrupts PDFFarhan SamsuddinNo ratings yet
- OS ComponentsDocument12 pagesOS ComponentsLinda BrownNo ratings yet
- InterruptsDocument27 pagesInterruptsanayaNo ratings yet
- InterruptsDocument9 pagesInterruptsGethzi AkilaNo ratings yet
- Interrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasDocument67 pagesInterrupts, Exceptions, and System Calls: Chester Rebeiro IIT MadrasprashantvlsiNo ratings yet
- 13 InteruptsDocument5 pages13 InteruptsUditNo ratings yet
- I O TechniquesDocument2 pagesI O TechniquesAbdul Wahab MulkNo ratings yet
- Mit IiDocument190 pagesMit IiSaurabh MishraNo ratings yet
- TERM Paper B51Document13 pagesTERM Paper B51vikasshalluNo ratings yet
- InterruptsDocument4 pagesInterruptsProff MuchNo ratings yet
- Chap 1Document48 pagesChap 1alosypov21No ratings yet
- DeviceDrivers NewDocument21 pagesDeviceDrivers NewtsNo ratings yet
- Lesson6 Input and Output Devices and InterruptsDocument3 pagesLesson6 Input and Output Devices and Interruptsleonard thuoNo ratings yet
- Arm Cortex M4Document42 pagesArm Cortex M4kunduru laxmi pavanNo ratings yet
- 08 - NvicDocument29 pages08 - NvicSeif Al-dein AhmedNo ratings yet
- Device Drivers For Interrupt Handling: 19.1 DefinitionDocument6 pagesDevice Drivers For Interrupt Handling: 19.1 DefinitionSoundarya SvsNo ratings yet
- L3 - InterruptDocument39 pagesL3 - Interruptandreasmagaka11No ratings yet
- Chapter 1: Intro: 1.1 What Operating Systems DoDocument10 pagesChapter 1: Intro: 1.1 What Operating Systems DoBraiden MaggiaNo ratings yet
- Unit 7Document32 pagesUnit 7prototypes6341No ratings yet
- CS 303 Chapter 1, Lecture 2Document16 pagesCS 303 Chapter 1, Lecture 2HARSH MITTALNo ratings yet
- Esd 1Document40 pagesEsd 1154Soyal LonareNo ratings yet
- Chapter 13 Interrupt HandlersDocument3 pagesChapter 13 Interrupt Handlersmiss.nandini26No ratings yet
- Interrupt& ExceptionDocument12 pagesInterrupt& ExceptionBAL KRISHNA PANDEYNo ratings yet
- Real Time Computing and Programming - IntroDocument19 pagesReal Time Computing and Programming - IntroNon ArtistsNo ratings yet
- MP Unit 6 OneshotDocument10 pagesMP Unit 6 Oneshotramdeshpande2918No ratings yet
- CS8493 Operating Systems - Unit IDocument24 pagesCS8493 Operating Systems - Unit ILokesh Srm100% (2)
- Interrupt ProcessingDocument7 pagesInterrupt Processingvagigip197No ratings yet
- Interrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16Document38 pagesInterrupts: ECE 445 - Computer Organization Dr. Craig Lorie Electrical and Computer Engineering Lecture #16robNo ratings yet
- Lahore Garrison University: Department of Software EngineeringDocument4 pagesLahore Garrison University: Department of Software EngineeringkashifNo ratings yet
- COMPX203 Computer Systems: Exceptions and InterruptsDocument51 pagesCOMPX203 Computer Systems: Exceptions and InterruptsAmiel BougenNo ratings yet
- Unit 3Document15 pagesUnit 3SIT127- TIWARI KUNALNo ratings yet
- OS Lecture 2Document32 pagesOS Lecture 2Md Masum BillahNo ratings yet
- Microcomputer SystemDocument6 pagesMicrocomputer SystemrohitNo ratings yet
- Part 1.1 Unit V Interrupts and DmaDocument13 pagesPart 1.1 Unit V Interrupts and DmaAishwarya RajeshNo ratings yet
- interrupt and trapsDocument6 pagesinterrupt and trapshamiduusmanisaNo ratings yet
- InterruptDocument7 pagesInterruptJoseph John100% (1)
- InterruptsDocument16 pagesInterruptsRajaViriyalaNo ratings yet
- Embedded SystemsDocument28 pagesEmbedded SystemsCheril Mehta0% (1)
- Lecture2 StructuresDocument31 pagesLecture2 StructuressandalskatsNo ratings yet
- Operating System: Lecturer Ameer Sameer Hamood University of BabylonDocument33 pagesOperating System: Lecturer Ameer Sameer Hamood University of BabylonMohsen AljazaeryNo ratings yet
- OS - Lecture 02 Operating SystemDocument13 pagesOS - Lecture 02 Operating SystemZeeshan AhmadNo ratings yet
- CSC 205 - 2 Instruction Processing 2023-2024Document35 pagesCSC 205 - 2 Instruction Processing 2023-2024hahnonimusNo ratings yet
- Embedded (Practical)Document18 pagesEmbedded (Practical)Devika KachhawahaNo ratings yet
- Chapter 3 - 4: Relay Logic Circuit (RLC)Document18 pagesChapter 3 - 4: Relay Logic Circuit (RLC)chibssa alemayehuNo ratings yet
- Interrupts and Interrupt ProcessingDocument32 pagesInterrupts and Interrupt ProcessingObed AttaNo ratings yet
- Kalinga University Department of Computer ScienceDocument13 pagesKalinga University Department of Computer SciencePooja Singh ThakurNo ratings yet
- InterruptDocument4 pagesInterruptChandraNo ratings yet
- Lecture 02Document16 pagesLecture 02api-3801184No ratings yet
- Operating Systems ECE344: Lecture 2: ArchitecturalDocument52 pagesOperating Systems ECE344: Lecture 2: ArchitecturalKhaledFathyNo ratings yet
- Introduction To Embedded Systems: Melaku MDocument150 pagesIntroduction To Embedded Systems: Melaku MTalemaNo ratings yet
- Lec 8Document17 pagesLec 8deemo1354210No ratings yet
- Lecture4 InterruptsDocument12 pagesLecture4 InterruptsVarsha S LalapuraNo ratings yet
- Slides 1Document20 pagesSlides 1Muhammad yousufNo ratings yet
- CN Lab 1Document3 pagesCN Lab 1glimpsonNo ratings yet
- Comp 321 Lecture Slide Chapter 4 (Basic Computer Organization and Design)Document28 pagesComp 321 Lecture Slide Chapter 4 (Basic Computer Organization and Design)dokumbaro30No ratings yet
- STW120CT Computer Architecture and Networks: (Instruction Pipelining)Document24 pagesSTW120CT Computer Architecture and Networks: (Instruction Pipelining)BJ AcharyaNo ratings yet
- Computer-System Structure: DR Ir S S Msanjila Dr. Ir. S. S. MsanjilaDocument21 pagesComputer-System Structure: DR Ir S S Msanjila Dr. Ir. S. S. MsanjilaJacob MwaipopoNo ratings yet
- Os Al 02Document27 pagesOs Al 02shey aliseNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- All 17 PDF FreeDocument636 pagesAll 17 PDF FreeHariHaran KNo ratings yet
- RAC12c Theory Guide v8.0Document132 pagesRAC12c Theory Guide v8.0Irfan AhmadNo ratings yet
- HorcmDocument5 pagesHorcmBhaskar KNo ratings yet
- YuzuDocument4 pagesYuzuReignNo ratings yet
- ER1000 Remote Terminal Unit: ApplicationDocument8 pagesER1000 Remote Terminal Unit: Application1981todurkarNo ratings yet
- P60N03LDG Niko-Sem: N-Channel Logic Level Enhancement Mode Field Effect TransistorDocument5 pagesP60N03LDG Niko-Sem: N-Channel Logic Level Enhancement Mode Field Effect TransistorFRANCISCO JAVIER JARAMILLO MNo ratings yet
- Procurement Service - Annual Procurement Plan: Downloads MenuDocument3 pagesProcurement Service - Annual Procurement Plan: Downloads MenuChris-Goldie LorezoNo ratings yet
- Solid PrincipalDocument66 pagesSolid Principalkris2tmgNo ratings yet
- Huawei CampusInsight Data SheetDocument16 pagesHuawei CampusInsight Data SheetRizky KatiliNo ratings yet
- Gateway Ref1 CNDocument26 pagesGateway Ref1 CNgufranNo ratings yet
- Unit 2 - ASM1 - GuideDocument3 pagesUnit 2 - ASM1 - GuideHùng NguyễnNo ratings yet
- 15.6.2 Lab - Configure IPv4 and IPv6 Static and Default Routes - ILMDocument21 pages15.6.2 Lab - Configure IPv4 and IPv6 Static and Default Routes - ILMMuhammad FaizNo ratings yet
- ICT Basic Types of ComputerDocument7 pagesICT Basic Types of ComputerMomina B KhanNo ratings yet
- Transistores PEAVEYDocument25 pagesTransistores PEAVEYjefriNo ratings yet
- Rbead 600Document5 pagesRbead 600Rodrigo MirandaNo ratings yet
- Sophos Firewall Vs Checkpoint BCDocument8 pagesSophos Firewall Vs Checkpoint BC(unknown)No ratings yet
- GPT-7500 / GTS-750Document2 pagesGPT-7500 / GTS-750Topcon Middle East67% (3)
- Memory Interfacing: Example: Interface 4KB Memory To 8085 With Starting Address A000HDocument5 pagesMemory Interfacing: Example: Interface 4KB Memory To 8085 With Starting Address A000HSreepadam Padam100% (1)
- MVC Interview Questions PDFDocument9 pagesMVC Interview Questions PDFRAJINo ratings yet
- Sinamics v90 at s7-1200 Docu v1d1 enDocument85 pagesSinamics v90 at s7-1200 Docu v1d1 enIvan Scholl FilhoNo ratings yet
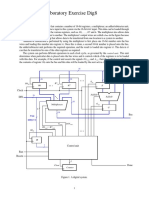
- Laboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataDocument6 pagesLaboratory Exercise D: R0, - . - , R7 and A. The Multiplexer Also Allows DataMunya RushambwaNo ratings yet
- EC6405 Control Systems EngineeringDocument30 pagesEC6405 Control Systems EngineeringAl-ShukaNo ratings yet
- VMwareNSXAdvancedLoadBalancerDocument7 pagesVMwareNSXAdvancedLoadBalancerLissett Bring SanchiddrianNo ratings yet
- Btech Syllabus Rtu 3-8 SemesterDocument86 pagesBtech Syllabus Rtu 3-8 SemesterSanat SharmaNo ratings yet
- MC Part A Programs-UpdatedDocument6 pagesMC Part A Programs-UpdatedM.A rajaNo ratings yet
- Website Testing: Tech Mahindra Limited Confidential © Tech Mahindra Limited 2007Document20 pagesWebsite Testing: Tech Mahindra Limited Confidential © Tech Mahindra Limited 2007rahul patraNo ratings yet
- Vmware NSX Advanced Load Balancer: Install, Configure, ManageDocument3 pagesVmware NSX Advanced Load Balancer: Install, Configure, ManageneoaltNo ratings yet