
Analog Design Journal
Analog Design Journal
You might also like
- Analog IC Design With Low-Dropout RegulatorsDocument373 pagesAnalog IC Design With Low-Dropout RegulatorsHoang le Huy67% (3)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Project Report Speed Control of Induction MotorDocument47 pagesProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Exercise 4 Iron Tower Lighting ControlDocument6 pagesExercise 4 Iron Tower Lighting ControlJude Philip MaglasangNo ratings yet
- Simulation of Buck Boost ConverterDocument4 pagesSimulation of Buck Boost Converterganeshkurapati_15512No ratings yet
- Delomatic 3, SCM-1, Synchronising-Measuring Module 4921240056 UKDocument3 pagesDelomatic 3, SCM-1, Synchronising-Measuring Module 4921240056 UKВупсень ПупсеньNo ratings yet
- Uses DBX 146221Document8 pagesUses DBX 146221shirtquittersNo ratings yet
- Buie UpgradeDocument4 pagesBuie UpgradeNatasaBugaian100% (1)
- Direct Digital Synthesis Controlled Pure Sine Wave InverterDocument17 pagesDirect Digital Synthesis Controlled Pure Sine Wave InverterNabil MohammadNo ratings yet
- Design of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CDocument25 pagesDesign of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CShuaib Ahmad KhanNo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- 500-kHz Half-Bridge DC-DC ConverterDocument17 pages500-kHz Half-Bridge DC-DC Converteratkxyz777100% (1)
- Zenith ZTG Transfer Switch: Spec SheetDocument15 pagesZenith ZTG Transfer Switch: Spec SheetDomenico SarcinaNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- Signal ProcessingDocument47 pagesSignal ProcessingAthira rcNo ratings yet
- AND8273/D Design of A 100 W Active Clamp Forward DC DC Converter For Telecom Systems Using The NCP1562Document20 pagesAND8273/D Design of A 100 W Active Clamp Forward DC DC Converter For Telecom Systems Using The NCP1562Elie IlokoNo ratings yet
- Dual Active BrdigeDocument20 pagesDual Active Brdigeayush sharmaNo ratings yet
- Multilevel InverterDocument74 pagesMultilevel InverterRaghu Selvaraj100% (4)
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Digital Power-Conversion For The Analog EngineerDocument12 pagesDigital Power-Conversion For The Analog EngineerfjwoemcuNo ratings yet
- MPPT - Maximum Power Point TrackingDocument9 pagesMPPT - Maximum Power Point TrackingSanjeev ReddyNo ratings yet
- A Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterDocument6 pagesA Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterKPCYP COHODNo ratings yet
- MAX9979Document60 pagesMAX9979justcatchmenowNo ratings yet
- LNK605 DatasheetDocument18 pagesLNK605 DatasheetdgujarathiNo ratings yet
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocument9 pagesClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravNo ratings yet
- Transformer protection systemDocument57 pagesTransformer protection systemAnkit RajNo ratings yet
- Slyt 718Document5 pagesSlyt 718wartchev39No ratings yet
- MegaMoto Plus Motor Control Shield For ArduinoDocument13 pagesMegaMoto Plus Motor Control Shield For ArduinosiogNo ratings yet
- An Open-Loop Stepper Motor Driver Based On FPGADocument5 pagesAn Open-Loop Stepper Motor Driver Based On FPGADivya JamesNo ratings yet
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDocument3 pagesController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Gate Driver Circuit For Three Phase InverterDocument13 pagesGate Driver Circuit For Three Phase InverterMarc TcheukabaNo ratings yet
- EI5007W2Document17 pagesEI5007W2PyiAungNo ratings yet
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 pagesLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Adc 0808Document6 pagesAdc 0808GokulThalaNo ratings yet
- Design and Implementation of Parallel Connected DC-DC Buck ConvertersDocument6 pagesDesign and Implementation of Parallel Connected DC-DC Buck ConvertersColzi ChenNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Arduino Driving Power Mosfet uRiZsEVG6kDocument11 pagesArduino Driving Power Mosfet uRiZsEVG6kahas viyanaNo ratings yet
- University of Engineering & Technology LahoreDocument43 pagesUniversity of Engineering & Technology LahoreKantesh KumarNo ratings yet
- Analog To Digital ConvertDocument20 pagesAnalog To Digital ConvertluxiaofengNo ratings yet
- ADIC ExperimentsDocument41 pagesADIC ExperimentsTushar PatilNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- Training Curriculum: TIA Portal Module 009Document27 pagesTraining Curriculum: TIA Portal Module 009Hải Nguyễn KhắcNo ratings yet
- VE Transfer Switch-Pdf-EnDocument9 pagesVE Transfer Switch-Pdf-EnAnte MilanovićNo ratings yet
- 1999apr08 Icd PD Tac2Document11 pages1999apr08 Icd PD Tac2King GervinhoNo ratings yet
- LSC Presentation: Topic:-Dual Slope A/D ConvertorDocument8 pagesLSC Presentation: Topic:-Dual Slope A/D ConvertorSatyakam JhaNo ratings yet
- Diy Boost CalcDocument6 pagesDiy Boost Calckutu32No ratings yet
- Design Report Pss20Document46 pagesDesign Report Pss20Jaciel LMNo ratings yet
- A Closed Loop Control of Buck Boost Ac Ac Converter With Reduced THDDocument9 pagesA Closed Loop Control of Buck Boost Ac Ac Converter With Reduced THDAndrés ToroNo ratings yet
- Microchip CLC DescriptionDocument12 pagesMicrochip CLC DescriptionKamlesh YadavNo ratings yet
- Unit 2 - NewDocument61 pagesUnit 2 - NewMonster AmanNo ratings yet
- ELC Brosure Eng 08Document10 pagesELC Brosure Eng 08RunhydroNo ratings yet
- Dem 60 CDocument3 pagesDem 60 Cmohannad87No ratings yet
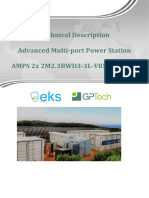
- AMPS - 2x - 2M2.3BWD3 3L V850 MV34.5Document38 pagesAMPS - 2x - 2M2.3BWD3 3L V850 MV34.5Josue Crespo GonzalezNo ratings yet
- Synchronization PanelDocument31 pagesSynchronization PanelHariom ChaurasiyaNo ratings yet
- 004 Pwm-OcxiDocument7 pages004 Pwm-OcxiNeodymeNo ratings yet
- Power Factor Correction AC-DC ConverterDocument5 pagesPower Factor Correction AC-DC Convertermatadamahesh1No ratings yet
- ABSTRACT: The Transformer Is A Static Device, Which ConvertsDocument15 pagesABSTRACT: The Transformer Is A Static Device, Which Convertsindhu kaviNo ratings yet
- PW2 MCDDocument5 pagesPW2 MCDUlul AzmiNo ratings yet
- Automatic Static Transfer SwitchDocument2 pagesAutomatic Static Transfer Switchanoop13No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Ruso 6Document1 pageRuso 6Oscar SuarezNo ratings yet
- Ruso 2Document1 pageRuso 2Oscar SuarezNo ratings yet
- Ruso 4Document1 pageRuso 4Oscar SuarezNo ratings yet
- Ruso 3Document1 pageRuso 3Oscar SuarezNo ratings yet
- UNDP PV BookletDocument20 pagesUNDP PV BookletZeina RammalNo ratings yet
- ARM-A Mandatory PrimerDocument4 pagesARM-A Mandatory PrimervigneshwaranjNo ratings yet
- Vista RG750-V2 - Englisch ManualDocument9 pagesVista RG750-V2 - Englisch Manualsorsricerche100% (1)
- Micro ControllerDocument41 pagesMicro ControllerSaravana RajaNo ratings yet
- Ade NotesDocument128 pagesAde NotesKiranmai KonduruNo ratings yet
- FM 24-11 Tactical Satellite CommunicationsDocument90 pagesFM 24-11 Tactical Satellite CommunicationsMark CheneyNo ratings yet
- Operating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Document79 pagesOperating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Mohammad MorassaeiNo ratings yet
- Chemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityDocument13 pagesChemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityNishith Naik100% (1)
- 06 639Document28 pages06 639erve17No ratings yet
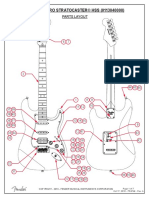
- Fender Am Pro Stratocaster HSS Manual y PartesDocument7 pagesFender Am Pro Stratocaster HSS Manual y PartesMario Orlando NerioNo ratings yet
- Relay MY2NDocument16 pagesRelay MY2NSofyan AndikaNo ratings yet
- JNTUK Computer Organization Nov 2015 Question PaperDocument4 pagesJNTUK Computer Organization Nov 2015 Question PaperTSRKNo ratings yet
- Dist RelayDocument6 pagesDist RelaymakroumNo ratings yet
- Chap04 (12 21 06) PDFDocument66 pagesChap04 (12 21 06) PDFHassan FarssiNo ratings yet
- MainDocument2,929 pagesMainanon_172022236No ratings yet
- 5200236-00A - Salwico AC-IR-3Fq - Addressable-Conventional IR Flame DetectorDocument4 pages5200236-00A - Salwico AC-IR-3Fq - Addressable-Conventional IR Flame DetectorcembozNo ratings yet
- Power Semiconductors and Power Supplies PDFDocument132 pagesPower Semiconductors and Power Supplies PDFtranhuutuongNo ratings yet
- Chinna Resume1Document3 pagesChinna Resume1saisurenNo ratings yet
- Unidirectional LED Based Solar Light (TorchDocument6 pagesUnidirectional LED Based Solar Light (TorchDeepak PrmNo ratings yet
- Name: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeDocument9 pagesName: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeNikit FariaNo ratings yet
- ALIA Manual AVF7000Document26 pagesALIA Manual AVF7000Abid HameedNo ratings yet
- Service Manual: VCR 5300 VCR 4300 VCR 2300Document110 pagesService Manual: VCR 5300 VCR 4300 VCR 2300wid9981No ratings yet
- Atmega168pa Au AtmelDocument419 pagesAtmega168pa Au AtmelDeibis Francisco Paredes HurtadoNo ratings yet
- Nx301a 1Document2 pagesNx301a 1AhmadAfiqNo ratings yet
- KX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)Document232 pagesKX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)ValeriiNo ratings yet
- What Is A Lecher AntennaDocument4 pagesWhat Is A Lecher AntennaPt AkaashNo ratings yet
- PAW3805EK-CJV2 Brief-V1.3 27062017Document1 pagePAW3805EK-CJV2 Brief-V1.3 27062017rreglosNo ratings yet



























































































Download as pdf or txt
You might also like
- Analog IC Design With Low-Dropout RegulatorsDocument373 pagesAnalog IC Design With Low-Dropout RegulatorsHoang le Huy67% (3)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- Project Report Speed Control of Induction MotorDocument47 pagesProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Exercise 4 Iron Tower Lighting ControlDocument6 pagesExercise 4 Iron Tower Lighting ControlJude Philip MaglasangNo ratings yet
- Simulation of Buck Boost ConverterDocument4 pagesSimulation of Buck Boost Converterganeshkurapati_15512No ratings yet
- Delomatic 3, SCM-1, Synchronising-Measuring Module 4921240056 UKDocument3 pagesDelomatic 3, SCM-1, Synchronising-Measuring Module 4921240056 UKВупсень ПупсеньNo ratings yet
- Uses DBX 146221Document8 pagesUses DBX 146221shirtquittersNo ratings yet
- Buie UpgradeDocument4 pagesBuie UpgradeNatasaBugaian100% (1)
- Direct Digital Synthesis Controlled Pure Sine Wave InverterDocument17 pagesDirect Digital Synthesis Controlled Pure Sine Wave InverterNabil MohammadNo ratings yet
- Design of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CDocument25 pagesDesign of Digital Controller For Switch Mode Power Supply: Presented by Santwana Kumari SO/CShuaib Ahmad KhanNo ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- 500-kHz Half-Bridge DC-DC ConverterDocument17 pages500-kHz Half-Bridge DC-DC Converteratkxyz777100% (1)
- Zenith ZTG Transfer Switch: Spec SheetDocument15 pagesZenith ZTG Transfer Switch: Spec SheetDomenico SarcinaNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- Signal ProcessingDocument47 pagesSignal ProcessingAthira rcNo ratings yet
- AND8273/D Design of A 100 W Active Clamp Forward DC DC Converter For Telecom Systems Using The NCP1562Document20 pagesAND8273/D Design of A 100 W Active Clamp Forward DC DC Converter For Telecom Systems Using The NCP1562Elie IlokoNo ratings yet
- Dual Active BrdigeDocument20 pagesDual Active Brdigeayush sharmaNo ratings yet
- Multilevel InverterDocument74 pagesMultilevel InverterRaghu Selvaraj100% (4)
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Digital Power-Conversion For The Analog EngineerDocument12 pagesDigital Power-Conversion For The Analog EngineerfjwoemcuNo ratings yet
- MPPT - Maximum Power Point TrackingDocument9 pagesMPPT - Maximum Power Point TrackingSanjeev ReddyNo ratings yet
- A Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterDocument6 pagesA Implementation of Single-Switch Nonisolated Transformerless Buck-Boost DC-DC ConverterKPCYP COHODNo ratings yet
- MAX9979Document60 pagesMAX9979justcatchmenowNo ratings yet
- LNK605 DatasheetDocument18 pagesLNK605 DatasheetdgujarathiNo ratings yet
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocument9 pagesClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravNo ratings yet
- Transformer protection systemDocument57 pagesTransformer protection systemAnkit RajNo ratings yet
- Slyt 718Document5 pagesSlyt 718wartchev39No ratings yet
- MegaMoto Plus Motor Control Shield For ArduinoDocument13 pagesMegaMoto Plus Motor Control Shield For ArduinosiogNo ratings yet
- An Open-Loop Stepper Motor Driver Based On FPGADocument5 pagesAn Open-Loop Stepper Motor Driver Based On FPGADivya JamesNo ratings yet
- Controller Design For Buck Converter Step-by-Step Approach: Swapna ManurkarDocument3 pagesController Design For Buck Converter Step-by-Step Approach: Swapna ManurkarJessica RossNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Gate Driver Circuit For Three Phase InverterDocument13 pagesGate Driver Circuit For Three Phase InverterMarc TcheukabaNo ratings yet
- EI5007W2Document17 pagesEI5007W2PyiAungNo ratings yet
- LM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsDocument10 pagesLM25005, LM25010: Buck Regulator Topologies For Wide Input/Output Voltage DifferentialsBejoy ThomasNo ratings yet
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Document63 pagesChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanNo ratings yet
- Adc 0808Document6 pagesAdc 0808GokulThalaNo ratings yet
- Design and Implementation of Parallel Connected DC-DC Buck ConvertersDocument6 pagesDesign and Implementation of Parallel Connected DC-DC Buck ConvertersColzi ChenNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Arduino Driving Power Mosfet uRiZsEVG6kDocument11 pagesArduino Driving Power Mosfet uRiZsEVG6kahas viyanaNo ratings yet
- University of Engineering & Technology LahoreDocument43 pagesUniversity of Engineering & Technology LahoreKantesh KumarNo ratings yet
- Analog To Digital ConvertDocument20 pagesAnalog To Digital ConvertluxiaofengNo ratings yet
- ADIC ExperimentsDocument41 pagesADIC ExperimentsTushar PatilNo ratings yet
- Chapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerDocument48 pagesChapter One Controlling The Operation of Wind-Solar Hybrid Power System Using Arduino-Based Hybrid MPPT ControllerOdebunmi NathanielNo ratings yet
- Training Curriculum: TIA Portal Module 009Document27 pagesTraining Curriculum: TIA Portal Module 009Hải Nguyễn KhắcNo ratings yet
- VE Transfer Switch-Pdf-EnDocument9 pagesVE Transfer Switch-Pdf-EnAnte MilanovićNo ratings yet
- 1999apr08 Icd PD Tac2Document11 pages1999apr08 Icd PD Tac2King GervinhoNo ratings yet
- LSC Presentation: Topic:-Dual Slope A/D ConvertorDocument8 pagesLSC Presentation: Topic:-Dual Slope A/D ConvertorSatyakam JhaNo ratings yet
- Diy Boost CalcDocument6 pagesDiy Boost Calckutu32No ratings yet
- Design Report Pss20Document46 pagesDesign Report Pss20Jaciel LMNo ratings yet
- A Closed Loop Control of Buck Boost Ac Ac Converter With Reduced THDDocument9 pagesA Closed Loop Control of Buck Boost Ac Ac Converter With Reduced THDAndrés ToroNo ratings yet
- Microchip CLC DescriptionDocument12 pagesMicrochip CLC DescriptionKamlesh YadavNo ratings yet
- Unit 2 - NewDocument61 pagesUnit 2 - NewMonster AmanNo ratings yet
- ELC Brosure Eng 08Document10 pagesELC Brosure Eng 08RunhydroNo ratings yet
- Dem 60 CDocument3 pagesDem 60 Cmohannad87No ratings yet
- AMPS - 2x - 2M2.3BWD3 3L V850 MV34.5Document38 pagesAMPS - 2x - 2M2.3BWD3 3L V850 MV34.5Josue Crespo GonzalezNo ratings yet
- Synchronization PanelDocument31 pagesSynchronization PanelHariom ChaurasiyaNo ratings yet
- 004 Pwm-OcxiDocument7 pages004 Pwm-OcxiNeodymeNo ratings yet
- Power Factor Correction AC-DC ConverterDocument5 pagesPower Factor Correction AC-DC Convertermatadamahesh1No ratings yet
- ABSTRACT: The Transformer Is A Static Device, Which ConvertsDocument15 pagesABSTRACT: The Transformer Is A Static Device, Which Convertsindhu kaviNo ratings yet
- PW2 MCDDocument5 pagesPW2 MCDUlul AzmiNo ratings yet
- Automatic Static Transfer SwitchDocument2 pagesAutomatic Static Transfer Switchanoop13No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Ruso 6Document1 pageRuso 6Oscar SuarezNo ratings yet
- Ruso 2Document1 pageRuso 2Oscar SuarezNo ratings yet
- Ruso 4Document1 pageRuso 4Oscar SuarezNo ratings yet
- Ruso 3Document1 pageRuso 3Oscar SuarezNo ratings yet
- UNDP PV BookletDocument20 pagesUNDP PV BookletZeina RammalNo ratings yet
- ARM-A Mandatory PrimerDocument4 pagesARM-A Mandatory PrimervigneshwaranjNo ratings yet
- Vista RG750-V2 - Englisch ManualDocument9 pagesVista RG750-V2 - Englisch Manualsorsricerche100% (1)
- Micro ControllerDocument41 pagesMicro ControllerSaravana RajaNo ratings yet
- Ade NotesDocument128 pagesAde NotesKiranmai KonduruNo ratings yet
- FM 24-11 Tactical Satellite CommunicationsDocument90 pagesFM 24-11 Tactical Satellite CommunicationsMark CheneyNo ratings yet
- Operating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Document79 pagesOperating Instructions Specification Hiperface Motor Feedback Protocol Neutral IM0064865Mohammad MorassaeiNo ratings yet
- Chemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityDocument13 pagesChemistry Project For Class 12 Topic: Saturated Solution: Measuring SolubilityNishith Naik100% (1)
- 06 639Document28 pages06 639erve17No ratings yet
- Fender Am Pro Stratocaster HSS Manual y PartesDocument7 pagesFender Am Pro Stratocaster HSS Manual y PartesMario Orlando NerioNo ratings yet
- Relay MY2NDocument16 pagesRelay MY2NSofyan AndikaNo ratings yet
- JNTUK Computer Organization Nov 2015 Question PaperDocument4 pagesJNTUK Computer Organization Nov 2015 Question PaperTSRKNo ratings yet
- Dist RelayDocument6 pagesDist RelaymakroumNo ratings yet
- Chap04 (12 21 06) PDFDocument66 pagesChap04 (12 21 06) PDFHassan FarssiNo ratings yet
- MainDocument2,929 pagesMainanon_172022236No ratings yet
- 5200236-00A - Salwico AC-IR-3Fq - Addressable-Conventional IR Flame DetectorDocument4 pages5200236-00A - Salwico AC-IR-3Fq - Addressable-Conventional IR Flame DetectorcembozNo ratings yet
- Power Semiconductors and Power Supplies PDFDocument132 pagesPower Semiconductors and Power Supplies PDFtranhuutuongNo ratings yet
- Chinna Resume1Document3 pagesChinna Resume1saisurenNo ratings yet
- Unidirectional LED Based Solar Light (TorchDocument6 pagesUnidirectional LED Based Solar Light (TorchDeepak PrmNo ratings yet
- Name: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeDocument9 pagesName: Vinit J Faria Roll No. 157 STD: S.Y.J.C. (Science) Div: II Elphinstone CollegeNikit FariaNo ratings yet
- ALIA Manual AVF7000Document26 pagesALIA Manual AVF7000Abid HameedNo ratings yet
- Service Manual: VCR 5300 VCR 4300 VCR 2300Document110 pagesService Manual: VCR 5300 VCR 4300 VCR 2300wid9981No ratings yet
- Atmega168pa Au AtmelDocument419 pagesAtmega168pa Au AtmelDeibis Francisco Paredes HurtadoNo ratings yet
- Nx301a 1Document2 pagesNx301a 1AhmadAfiqNo ratings yet
- KX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)Document232 pagesKX-FP207FX-S KX-FP218FX-S: Compact Plain Paper Fax (With Digital Answering System)ValeriiNo ratings yet
- What Is A Lecher AntennaDocument4 pagesWhat Is A Lecher AntennaPt AkaashNo ratings yet
- PAW3805EK-CJV2 Brief-V1.3 27062017Document1 pagePAW3805EK-CJV2 Brief-V1.3 27062017rreglosNo ratings yet