Download as pdf or txt
You might also like
- Date: Class: CSEC Maths - Vectors and Matrices Title: Past Paper Questions On Vectors and Matrices From 2010 - 2021Document47 pagesDate: Class: CSEC Maths - Vectors and Matrices Title: Past Paper Questions On Vectors and Matrices From 2010 - 2021Zaria Henry100% (8)
- Lab 06 - Homework - Conceptual Model For VoltageDocument4 pagesLab 06 - Homework - Conceptual Model For VoltageYashvi SrivastavaNo ratings yet
- Numerical Analysis and Its Application Ass GillDocument6 pagesNumerical Analysis and Its Application Ass GillShahrukh GillNo ratings yet
- Modeling of Electromechanical Systems PDFDocument44 pagesModeling of Electromechanical Systems PDFBrandon GordonNo ratings yet
- Empirical and Analytical Modelling of System DynamicsDocument12 pagesEmpirical and Analytical Modelling of System DynamicsOthniel EmejeNo ratings yet
- Ebook System Dynamics For Engineering Students Concepts and Applications PDF Full Chapter PDFDocument67 pagesEbook System Dynamics For Engineering Students Concepts and Applications PDF Full Chapter PDFlula.waldman834100% (34)
- Power System StabilityDocument9 pagesPower System StabilityMyScribdddNo ratings yet
- Lecture NotesDocument70 pagesLecture NotesPrathamraj ChauhanNo ratings yet
- Theoretical and Experimental Research: Diagnostic Analysis of The Feed Kinematic Chain Mechanical SystemDocument23 pagesTheoretical and Experimental Research: Diagnostic Analysis of The Feed Kinematic Chain Mechanical SystemNikhil ThakurNo ratings yet
- System Dynamics For Engineering Students Concepts and Applications 2Nd Edition Nicolae Lobontiu Full ChapterDocument61 pagesSystem Dynamics For Engineering Students Concepts and Applications 2Nd Edition Nicolae Lobontiu Full Chapterbarbara.fitzpatrick934100% (9)
- System Modeling: PRESSENTED BY:-Er. Saurabh MalpotraDocument36 pagesSystem Modeling: PRESSENTED BY:-Er. Saurabh MalpotraCr ZyNo ratings yet
- CH01 ModelingSystemsDocument20 pagesCH01 ModelingSystemspraveen alwisNo ratings yet
- Estimating Parameters in A Lumped Parameter System With First Principle Modeling and Dynamic ExperimentsDocument6 pagesEstimating Parameters in A Lumped Parameter System With First Principle Modeling and Dynamic ExperimentsParthiban RajendiranNo ratings yet
- SnS-SD-02!3!10 Modeling of Dynamics SystemsDocument25 pagesSnS-SD-02!3!10 Modeling of Dynamics Systemspd_orleansNo ratings yet
- Been Maintained or Lost Will Remain Stable Once Disturbance Is RemovedDocument3 pagesBeen Maintained or Lost Will Remain Stable Once Disturbance Is Removedez55No ratings yet
- Power System Modeling, Analysis and Control: A. P. Sakis Meliopoulos Professor Georgia Institute of TechnologyDocument30 pagesPower System Modeling, Analysis and Control: A. P. Sakis Meliopoulos Professor Georgia Institute of TechnologyMuruganNo ratings yet
- Mathematical Models: Module - 2Document13 pagesMathematical Models: Module - 2Rajath UpadhyaNo ratings yet
- Application of Multiple-Model Adaptive ControlDocument10 pagesApplication of Multiple-Model Adaptive ControlRabbuni GangavarapuNo ratings yet
- Intro On Vibration AnalysisDocument5 pagesIntro On Vibration AnalysisEmri MeheshuNo ratings yet
- System Dynamics and ControlDocument14 pagesSystem Dynamics and Controlcbr6000No ratings yet
- (Ortega2001) Putting Energy Back in ControlDocument16 pages(Ortega2001) Putting Energy Back in ControlFernando LoteroNo ratings yet
- Multiphysics Modeling and Optimization of Mechatronic Multibody SystemsDocument29 pagesMultiphysics Modeling and Optimization of Mechatronic Multibody SystemsaesotaerikNo ratings yet
- Effect of Load Increase and Power System StabilizeDocument14 pagesEffect of Load Increase and Power System StabilizeLê Trung DũngNo ratings yet
- Mechatronics Key Elements Information System: Modeling and SimulationDocument2 pagesMechatronics Key Elements Information System: Modeling and Simulation9740177035No ratings yet
- Introduction To Electromagnetic Transient Analysis of Power SystemsDocument8 pagesIntroduction To Electromagnetic Transient Analysis of Power Systemsअंकित अरोड़ाNo ratings yet
- Dynamics Modeling of Nonholonomic Mechanical SystemsDocument13 pagesDynamics Modeling of Nonholonomic Mechanical SystemsMarcelo PereiraNo ratings yet
- Modeling and Simulation Course Outline 2011Document2 pagesModeling and Simulation Course Outline 2011Latosha TrevinoNo ratings yet
- Inverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyDocument6 pagesInverted Pendulum Systems: Rotary and Arm-Driven A Mechatronic System Design Case StudyWan Nizam Wan SulaimanNo ratings yet
- System Modelling & Simulation of Energy SystemsDocument35 pagesSystem Modelling & Simulation of Energy SystemsH.J.PrabhuNo ratings yet
- Techniques of Identi FicationDocument48 pagesTechniques of Identi FicationtheterminatorNo ratings yet
- Chapter 1 - 1Document34 pagesChapter 1 - 1bezawitg2002No ratings yet
- W1 PDFDocument21 pagesW1 PDFShujah RashidNo ratings yet
- Dynamic Modeling and Control of An Electromechanical Control Actuation SystemDocument155 pagesDynamic Modeling and Control of An Electromechanical Control Actuation SystemHassanNo ratings yet
- Output Feedback Reinforcement Learning Control For Linear SystemsDocument304 pagesOutput Feedback Reinforcement Learning Control For Linear SystemsESLAM salahNo ratings yet
- Research Article: An Experimental Test Bed For Developing High-Rate Structural Health Monitoring MethodsDocument11 pagesResearch Article: An Experimental Test Bed For Developing High-Rate Structural Health Monitoring MethodsSandeep SonyNo ratings yet
- Mathematics 11 00525 With CoverDocument16 pagesMathematics 11 00525 With Cover黄凌翔No ratings yet
- Seminar Report Aditya Kumar YadavDocument19 pagesSeminar Report Aditya Kumar YadavUnknownNo ratings yet
- Mechatronic Design ApproachDocument49 pagesMechatronic Design ApproachRaghulNo ratings yet
- MRAC High OrderActuatorDynamicsDocument16 pagesMRAC High OrderActuatorDynamicsKrisdannerNo ratings yet
- Marine Predators Algorithm For Load Frequency Control of Modern Interconnected Power Systems Including Renewable Energy Sources and Energy Storage UnitsDocument22 pagesMarine Predators Algorithm For Load Frequency Control of Modern Interconnected Power Systems Including Renewable Energy Sources and Energy Storage UnitsMohamed SobhyNo ratings yet
- 10.1007@978 3 030 31295 4Document537 pages10.1007@978 3 030 31295 4oxxy22No ratings yet
- Dynamics of Mechatronics Systems, Modeling, Simulation, Control, Optimization and Experimental Investigations byDocument351 pagesDynamics of Mechatronics Systems, Modeling, Simulation, Control, Optimization and Experimental Investigations byGonzalez ByronNo ratings yet
- Modeling of Electromechanical SystemsDocument30 pagesModeling of Electromechanical Systemssm-malik100% (1)
- Rate Based Distillation Williums PaperDocument4 pagesRate Based Distillation Williums Paperzorro21072107No ratings yet
- Mechatronic Systems Design: Mohammed AhmedDocument54 pagesMechatronic Systems Design: Mohammed AhmedShivam Kumar ShrivastavaNo ratings yet
- Bayesian Model Updatingreview PaperDocument18 pagesBayesian Model Updatingreview PaperprawinpsgNo ratings yet
- Dynamic Modeling and Simulation of Mechanical System Based On Dynamic Test DataDocument5 pagesDynamic Modeling and Simulation of Mechanical System Based On Dynamic Test DataMahmoud samahaNo ratings yet
- Control Systems NotesDocument50 pagesControl Systems NotesEEE CRRNo ratings yet
- Power System Dynamic State Estimation: Motivations, Definitions, Methodologies and Future WorkDocument11 pagesPower System Dynamic State Estimation: Motivations, Definitions, Methodologies and Future WorkHiranmayiPraveen DosapatiNo ratings yet
- A Report On Compliant MechanismsDocument22 pagesA Report On Compliant MechanismsRajesh Shyamrao KajeNo ratings yet
- PDF System Dynamics For Engineering Students Concepts and Applications 2Nd Edition Nicolae Lobontiu Ebook Full ChapterDocument53 pagesPDF System Dynamics For Engineering Students Concepts and Applications 2Nd Edition Nicolae Lobontiu Ebook Full Chapterlola.collins644100% (2)
- Libro 1Document200 pagesLibro 1Guillermo Angulo NiquenNo ratings yet
- Long-Horizon Model Predictive Control of Induction Motor DriveDocument15 pagesLong-Horizon Model Predictive Control of Induction Motor DriveabbasNo ratings yet
- SimulationDocument325 pagesSimulationLokesh NatooNo ratings yet
- Mechatronics: Automated Process Control: TH THDocument7 pagesMechatronics: Automated Process Control: TH THWalid AhmedNo ratings yet
- Module 1 Part 1 Engine DynamicsDocument57 pagesModule 1 Part 1 Engine DynamicsTara GerdingNo ratings yet
- Romblon State University College of Engineering Technology Department of Mechanical Engineering Odiongan, RomblonDocument4 pagesRomblon State University College of Engineering Technology Department of Mechanical Engineering Odiongan, RomblonYhan SombilonNo ratings yet
- 1 s2.0 0005109896855464 MainDocument20 pages1 s2.0 0005109896855464 MainFrancisco FloresNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Practical Control of Electric Machines: Model-Based Design and SimulationFrom EverandPractical Control of Electric Machines: Model-Based Design and SimulationNo ratings yet
- Se Storedge Interface DatasheetDocument2 pagesSe Storedge Interface DatasheetGregor AvbarNo ratings yet
- Syllabus CSEDocument129 pagesSyllabus CSEHritik RawatNo ratings yet
- Opening Sentence To Cover LetterDocument7 pagesOpening Sentence To Cover Letterc2kzzhdk100% (1)
- Wang Dual Super-Resolution Learning For Semantic Segmentation CVPR 2020 PaperDocument10 pagesWang Dual Super-Resolution Learning For Semantic Segmentation CVPR 2020 PaperEsha KolteNo ratings yet
- ECE 528 / DA 528 Machine Learning, Midterm Exam: InstructionsDocument5 pagesECE 528 / DA 528 Machine Learning, Midterm Exam: Instructionsşafak erdoğduNo ratings yet
- GAS Research FinalDocument35 pagesGAS Research FinalAvegael DumpNo ratings yet
- Manual Combinadores RF PciDocument7 pagesManual Combinadores RF PciproyectostelemicNo ratings yet
- Over Pressure RequirementsDocument40 pagesOver Pressure Requirementsl_badellNo ratings yet
- Guidelines For Retrofitting of BuildingsDocument45 pagesGuidelines For Retrofitting of Buildingsferdie macaranasNo ratings yet
- Cloud Risk Assessment Tool - Index: Purpose of This ToolDocument8 pagesCloud Risk Assessment Tool - Index: Purpose of This ToolKalyanaraman JayaramanNo ratings yet
- Manual de Partes de Daytona 350Document66 pagesManual de Partes de Daytona 350Alejandro LucNo ratings yet
- Tally Project 1Document31 pagesTally Project 1dhruba dasNo ratings yet
- Dobot Magician Demo DescriptionDocument51 pagesDobot Magician Demo Descriptionaleon2502No ratings yet
- How To Install Your Boost ControllerDocument5 pagesHow To Install Your Boost ControllerWalter Erick Balta LópezNo ratings yet
- k2000 Musicians GuideDocument530 pagesk2000 Musicians GuideJ. Guadalupe Uribe DévoraNo ratings yet
- (Windows 10) Digital License (HWID) & KMS38 GenerationDocument7 pages(Windows 10) Digital License (HWID) & KMS38 GenerationMauricio NaranjoNo ratings yet
- Sha2 256 Fips 180Document97 pagesSha2 256 Fips 180Setiawan RustandiNo ratings yet
- How To Secure Web AuthenticationDocument20 pagesHow To Secure Web AuthenticationArpit GargNo ratings yet
- DBMS Project ReportDocument37 pagesDBMS Project Reportps2848No ratings yet
- Message Ordering and Group CommunicationDocument19 pagesMessage Ordering and Group Communicationwajbharad1616No ratings yet
- Instruction Manual: Alfa Laval i-CP100 Centrifugal PumpDocument36 pagesInstruction Manual: Alfa Laval i-CP100 Centrifugal PumpAndres HurtadoNo ratings yet
- DWR-961 REVD DATASHEET v1.00 VERIZONDocument2 pagesDWR-961 REVD DATASHEET v1.00 VERIZONJohnNo ratings yet
- 03 EquilibriumDocument15 pages03 EquilibriumAndy BayuNo ratings yet
- P2 MEGA REVISION For JAN 21 Candidates PDFDocument3 pagesP2 MEGA REVISION For JAN 21 Candidates PDFblob bleepNo ratings yet
- Bielomatik: Calibration With Bielomatik Control Unit 30063109Document8 pagesBielomatik: Calibration With Bielomatik Control Unit 30063109김동옥No ratings yet
- Structural LoadingDocument5 pagesStructural Loadingin97777No ratings yet
- ELS 17 Juni 2020 PDFDocument8 pagesELS 17 Juni 2020 PDFFaizal AzizNo ratings yet
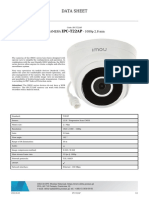
- Delta Opti Datasheet IPC T22APDocument2 pagesDelta Opti Datasheet IPC T22APWisma SantikaNo ratings yet