Download as pdf or txt
You might also like
- Company Profile Sample PDFDocument17 pagesCompany Profile Sample PDFSan Lizas Airen100% (2)
- InteliLite 4 AMF 8 Datasheet - 2Document4 pagesInteliLite 4 AMF 8 Datasheet - 2Bikash Das100% (1)
- Easy Servo Driver JK-HSD86Document7 pagesEasy Servo Driver JK-HSD86Renato KristićNo ratings yet
- User's Manual Mizar v2.0 50w FM TransmitterDocument47 pagesUser's Manual Mizar v2.0 50w FM Transmitterdiego pachon0% (1)
- Autocad 15X30 Home PlanDocument1 pageAutocad 15X30 Home PlanNawaz KhanNo ratings yet
- ProCAM II CAD-Surf TutorialDocument190 pagesProCAM II CAD-Surf TutorialClaudio Salcedo Coaquira100% (3)
- Shenzhen Rtelligent T60 Stepper Servo Drive User ManualDocument13 pagesShenzhen Rtelligent T60 Stepper Servo Drive User Manualjunior lNo ratings yet
- Electronic Governor For HEP Operation Manual, Schematic & Wiring DiagramsDocument40 pagesElectronic Governor For HEP Operation Manual, Schematic & Wiring DiagramsPritam Singh100% (4)
- Us 1Document4 pagesUs 1serviciobsasNo ratings yet
- 1550nm Optical Transmitter (V8610TE) Datasheet - V1.0Document4 pages1550nm Optical Transmitter (V8610TE) Datasheet - V1.0Fernando CalderonNo ratings yet
- PSM1Question ALLNewDocument7 pagesPSM1Question ALLNewAsim Naveed0% (2)
- New Step Servo Driver-DL86H Manual: CatalogDocument7 pagesNew Step Servo Driver-DL86H Manual: CatalogKacper GorajNo ratings yet
- HBS86H V2Document9 pagesHBS86H V2N MNo ratings yet
- Driver ZDM-2HA865 Manual SpecificationDocument10 pagesDriver ZDM-2HA865 Manual SpecificationEvan HaasjesNo ratings yet
- HBS86H DatasheetDocument3 pagesHBS86H DatasheetFariz FadianNo ratings yet
- New Step Servo Driver-HM86D Manual: 一、 IntroductionDocument9 pagesNew Step Servo Driver-HM86D Manual: 一、 IntroductionVladimir ShushkanovNo ratings yet
- SS86D用户操作手册V135英文版Document9 pagesSS86D用户操作手册V135英文版Renato KristićNo ratings yet
- HBS86H Hybrid Stepper Servo Drive ManualDocument22 pagesHBS86H Hybrid Stepper Servo Drive ManualPhúc Phan TiếnNo ratings yet
- 2HSS86HDocument6 pages2HSS86HRafik Mohamed Alhaji100% (1)
- Lcda 608s Digital DC Servo ManualDocument22 pagesLcda 608s Digital DC Servo ManualHoàng NguyễnNo ratings yet
- HSS60Document6 pagesHSS60Abraham GutierrezNo ratings yet
- Receiver Multicoupler: 380-520Mhz (220-550Mhz)Document2 pagesReceiver Multicoupler: 380-520Mhz (220-550Mhz)Bao Quoc MaiNo ratings yet
- Confu HDMI To EDP 4K Driver Board - Specification V1802Document7 pagesConfu HDMI To EDP 4K Driver Board - Specification V1802confuelectronics.comNo ratings yet
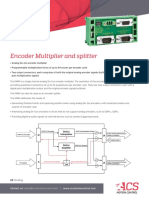
- Encoder Multiplier and Splitter: CE PendingDocument2 pagesEncoder Multiplier and Splitter: CE Pendingsaran2012No ratings yet
- HEDS 5700 F12 AvagoDocument5 pagesHEDS 5700 F12 AvagoJorge SánchezNo ratings yet
- Protection of IM (Group No.04) - ACT 456Document16 pagesProtection of IM (Group No.04) - ACT 456Praful UgaleNo ratings yet
- Servo Stepper Driver UK 2 HSS86Document7 pagesServo Stepper Driver UK 2 HSS86Mimo AbduNo ratings yet
- AAP149B: Features DescriptionDocument9 pagesAAP149B: Features DescriptionUday KrishnaNo ratings yet
- Karta Enkoderowa Oraz RS232RS485Document15 pagesKarta Enkoderowa Oraz RS232RS485Saber LeffiNo ratings yet
- 2 Channel in 4 Channel Out ADAU1701 Sigma DSP Pre-Amplifier With Bluetooth Plug-In ModuleDocument12 pages2 Channel in 4 Channel Out ADAU1701 Sigma DSP Pre-Amplifier With Bluetooth Plug-In ModuleNicolae Nechifor100% (1)
- Agito AGA155 Datasheet Rev.2.0Document4 pagesAgito AGA155 Datasheet Rev.2.0Imran AdilNo ratings yet
- User Manual Servo Driver SZGH-302: (One Driver To Control Two Motors Simultaneously)Document23 pagesUser Manual Servo Driver SZGH-302: (One Driver To Control Two Motors Simultaneously)Zdeněk HromadaNo ratings yet
- 170C Electric Steering Motor User ManualDocument20 pages170C Electric Steering Motor User ManualDavid FernándezNo ratings yet
- SOYEA LCD Service Manual PDFDocument40 pagesSOYEA LCD Service Manual PDFraipedriNo ratings yet
- SOYEA LCD Service Manual PDFDocument40 pagesSOYEA LCD Service Manual PDFraipedriNo ratings yet
- LM2SA Service ManualDocument40 pagesLM2SA Service Manualraipedri100% (5)
- UP4 Din BrochureDocument2 pagesUP4 Din BrochuresenthilrsenthilNo ratings yet
- Altivar 61 - ATV61HD37N4Document5 pagesAltivar 61 - ATV61HD37N4husan shahNo ratings yet
- HBS57 Closed Loop Driver Instructions: 1. FeaturesDocument6 pagesHBS57 Closed Loop Driver Instructions: 1. Featuresbayu ajiNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- InteliLite 4 AMF 20 Datasheet - 2Document4 pagesInteliLite 4 AMF 20 Datasheet - 2Cj BongNo ratings yet
- DVP-MC I Mul 20120507Document20 pagesDVP-MC I Mul 20120507Rafael ZilsNo ratings yet
- Familiarization of Temperature Process StationDocument6 pagesFamiliarization of Temperature Process StationPARVATHY ANILNo ratings yet
- Dq2611m ManualDocument7 pagesDq2611m ManualTawanda MandazaNo ratings yet
- Emdrive 500 Datasheet V2 6Document5 pagesEmdrive 500 Datasheet V2 6nathaniel benelishaNo ratings yet
- Altivar 61 - ATV61HD75N4ZDocument4 pagesAltivar 61 - ATV61HD75N4Zamr ibrahimNo ratings yet
- Sem102 Manual 1 PDFDocument11 pagesSem102 Manual 1 PDFricardo rodriguezNo ratings yet
- Altivar 61 - ATV61HD15N4Document5 pagesAltivar 61 - ATV61HD15N4Luis Orlando Rios MorenoNo ratings yet
- Autonics KRN1000 DatasheetDocument14 pagesAutonics KRN1000 DatasheetAditia Dwi SaputraNo ratings yet
- Service Manual: Led TVDocument35 pagesService Manual: Led TVJade SailorNo ratings yet
- LS 231g2 Advanced Multifunctional Servo DriveDocument56 pagesLS 231g2 Advanced Multifunctional Servo DriveElvis StansvikNo ratings yet
- 2HSS57 KH XX - JMC Nema 57 Closed Loop Stepper Driver Eng 451294Document23 pages2HSS57 KH XX - JMC Nema 57 Closed Loop Stepper Driver Eng 451294Ardiansyah AndryNo ratings yet
- DAQM 4202 SpecificationDocument8 pagesDAQM 4202 Specificationnicolas.tohme121No ratings yet
- 2dm2280 Digital Step DriverDocument22 pages2dm2280 Digital Step DrivermuhammedasifNo ratings yet
- LW 15 S 13 CXDocument102 pagesLW 15 S 13 CXDaniele GattiNo ratings yet
- DFR0853 Product Instruction - enDocument22 pagesDFR0853 Product Instruction - enBen Njima KhaledNo ratings yet
- Product Datasheet: Variable Speed Drive ATV312 - 2.2kW - 5.9kVA - 79W - 380..500 V-3-Phase SupplyDocument4 pagesProduct Datasheet: Variable Speed Drive ATV312 - 2.2kW - 5.9kVA - 79W - 380..500 V-3-Phase SupplyJeje worldعالم چيچيNo ratings yet
- AVX9-CZ-Specification ForenglishDocument11 pagesAVX9-CZ-Specification ForenglishZlatko MNo ratings yet
- Specification SheetDocument9 pagesSpecification SheetDie001No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Install and Quick StartDocument6 pagesInstall and Quick Startelian.charazkaNo ratings yet
- Final Report On Face RecognitionDocument22 pagesFinal Report On Face RecognitionSubhash Kumar67% (6)
- Min Filter - Matlab Code - Image ProcessingDocument3 pagesMin Filter - Matlab Code - Image Processingaloove660% (2)
- Control SpeedDocument4 pagesControl SpeedNghiep Hua CongNo ratings yet
- Data Sheet 6AV2124-0MC24-1AX0: General InformationDocument6 pagesData Sheet 6AV2124-0MC24-1AX0: General InformationnetpazNo ratings yet
- A4-P 4.0 enDocument200 pagesA4-P 4.0 enAtiq Ur RehmanNo ratings yet
- Data Encryption Standard DES Set 1Document11 pagesData Encryption Standard DES Set 1PrasiNo ratings yet
- Portable Operation FT-818 Go KitDocument54 pagesPortable Operation FT-818 Go Kit_0379victor_No ratings yet
- Ericsson Zero 3 (12mtr) Site Installation ManualDocument80 pagesEricsson Zero 3 (12mtr) Site Installation ManualAlyonaNo ratings yet
- MioPocket 4.0Document19 pagesMioPocket 4.0gheorghe_oancea100% (2)
- Notes Taken During 3 July APQP PPAP ClassDocument2 pagesNotes Taken During 3 July APQP PPAP Classrosemarie tolentinoNo ratings yet
- Arup BuildingDesign2020 v2Document31 pagesArup BuildingDesign2020 v2Vidya VenugopalNo ratings yet
- JC35DN enDocument11 pagesJC35DN enMohamed WahdanNo ratings yet
- Geography - AE - AEE - Civil Engineering Handwritten Notes (CivilEnggForAll - Com) PDFDocument220 pagesGeography - AE - AEE - Civil Engineering Handwritten Notes (CivilEnggForAll - Com) PDFMANJUNo ratings yet
- Catalogo Quemador RS310 Ev PrincipalDocument11 pagesCatalogo Quemador RS310 Ev Principaljose ismael barbosa riosNo ratings yet
- Complex Decision MakingDocument20 pagesComplex Decision MakingAreebaNo ratings yet
- Securing Iot With BlockchainDocument4 pagesSecuring Iot With BlockchainNguyễn HuyNo ratings yet
- Altivar Process ATV900 - ATV950D37N4Document13 pagesAltivar Process ATV900 - ATV950D37N4movick.25No ratings yet
- Ibm Module 1 HW Acquisition InstallationDocument3 pagesIbm Module 1 HW Acquisition Installationmana45No ratings yet
- Instructions For Use (Free Users) : in Order To Use This Template, You Must Credit by Keeping The Thanks SlideDocument18 pagesInstructions For Use (Free Users) : in Order To Use This Template, You Must Credit by Keeping The Thanks SlideKhánh NguyễnNo ratings yet
- Industry 4Document7 pagesIndustry 4Payangaati PradeepNo ratings yet
- How To Stop C# Console Applications of Closing Automatically - Stack Overflow PDFDocument4 pagesHow To Stop C# Console Applications of Closing Automatically - Stack Overflow PDFNani LopesNo ratings yet
- Chinese Wall Security Model Buzulan and TeleghinDocument13 pagesChinese Wall Security Model Buzulan and TeleghinLoryQa LoryNo ratings yet
- Inheritance in JavaDocument24 pagesInheritance in Javauddagiri sirishaNo ratings yet
- AI-10-Resolution StrategiesDocument18 pagesAI-10-Resolution Strategiespany p.gNo ratings yet
- Phase 2 (Second Half)Document9 pagesPhase 2 (Second Half)gan.yek2018No ratings yet