Download as pdf or txt
You might also like
- 3.4.6 Test (TST) - Working With Trigonometric Functions (Test)Document14 pages3.4.6 Test (TST) - Working With Trigonometric Functions (Test)Amelie Hernandez67% (3)
- Sensors: EEMD and Multiscale PCA-Based Signal Denoising Method and Its Application To Seismic P-Phase Arrival PickingDocument15 pagesSensors: EEMD and Multiscale PCA-Based Signal Denoising Method and Its Application To Seismic P-Phase Arrival PickingAntonio FernandezNo ratings yet
- Research Article: Direction-of-Arrival Estimation of Closely Spaced Emitters Using Compact ArraysDocument10 pagesResearch Article: Direction-of-Arrival Estimation of Closely Spaced Emitters Using Compact Arraysfaruk tanNo ratings yet
- Wideband Array Processing Using A Two-Sided Correlation TransformationDocument13 pagesWideband Array Processing Using A Two-Sided Correlation TransformationSuyash SinghNo ratings yet
- Research Article: A Novel ULA-Difference-Coarray-Based DOA Estimation Method For General Coherent SignalsDocument13 pagesResearch Article: A Novel ULA-Difference-Coarray-Based DOA Estimation Method For General Coherent SignalsMark LindseyNo ratings yet
- CoherentWideband Signals Direction Finding Using PDFDocument22 pagesCoherentWideband Signals Direction Finding Using PDFAbdelmadjid MAALINo ratings yet
- Liu, Huang, Zhou - 2012 - An Efficient Maximum Likelihood Method For Direction-Of-Arrival Estimation Via Sparse Bayesian LearningDocument11 pagesLiu, Huang, Zhou - 2012 - An Efficient Maximum Likelihood Method For Direction-Of-Arrival Estimation Via Sparse Bayesian LearningJavier MelendrezNo ratings yet
- 2024_MDPI Electronics_Citation_WPCDocument13 pages2024_MDPI Electronics_Citation_WPCSaurav GangulyNo ratings yet
- Iterative root-MUSIC Algorithm For DOA Estimation: (Invited Paper)Document4 pagesIterative root-MUSIC Algorithm For DOA Estimation: (Invited Paper)Lamiae SqualiNo ratings yet
- A Novel DOA Estimation Method For Wideband Sources Based On Fuzzy SystemsDocument9 pagesA Novel DOA Estimation Method For Wideband Sources Based On Fuzzy SystemsOugraz hassanNo ratings yet
- Active Sampling Rate Calibration Method For Acoustic Sensor NetworksDocument13 pagesActive Sampling Rate Calibration Method For Acoustic Sensor Networks会爆炸的小米NoteNo ratings yet
- A DOA Estimation Method of Coherent and Uncorrelated Sources Based On Nested ArraysDocument4 pagesA DOA Estimation Method of Coherent and Uncorrelated Sources Based On Nested ArraysaaNo ratings yet
- 2023_IIETA_REVA UnivDocument9 pages2023_IIETA_REVA UnivSaurav GangulyNo ratings yet
- Robust Calibration of Radio Interferometers in Non-Gaussian EnvironmentDocument12 pagesRobust Calibration of Radio Interferometers in Non-Gaussian EnvironmentDirgantara SiahaanNo ratings yet
- Fault Tolerant Matrix Pencil Method For Direction of Arrival EstimationDocument13 pagesFault Tolerant Matrix Pencil Method For Direction of Arrival EstimationsipijNo ratings yet
- SDOAnetDocument11 pagesSDOAneta'laa ashrafNo ratings yet
- Comparaison AlgosDocument5 pagesComparaison AlgosLamiae SqualiNo ratings yet
- Compressive Sensing-Based Coprime Array Direction-Of-Arrival EstimationDocument6 pagesCompressive Sensing-Based Coprime Array Direction-Of-Arrival Estimationzeeshan amirNo ratings yet
- Advanced Compressed Sensing Approach To Synthesis of Sparse Antenna ArraysDocument7 pagesAdvanced Compressed Sensing Approach To Synthesis of Sparse Antenna ArraysBhargav BikkaniNo ratings yet
- A New Statistical Measure of Signal SimilarityDocument9 pagesA New Statistical Measure of Signal SimilarityImpulse Detection SystemsNo ratings yet
- Zhang 2020Document12 pagesZhang 2020Hajar ChouiyakhNo ratings yet
- An Efficient Estimator For TDOA-based Source Localization With Minimum Number of SensorsDocument4 pagesAn Efficient Estimator For TDOA-based Source Localization With Minimum Number of SensorswidyaNo ratings yet
- Research Article An Improved Empirical Mode Decomposition Method For Vibration SignalDocument8 pagesResearch Article An Improved Empirical Mode Decomposition Method For Vibration SignalArianna KaterineNo ratings yet
- Partial Localization in 3-D With A Multi-DNN Model Based On A Virtual Measurement MethodDocument12 pagesPartial Localization in 3-D With A Multi-DNN Model Based On A Virtual Measurement Methodmahdi77noroNo ratings yet
- Acoustic Source Localization and Beamforming: Theory and PracticeDocument13 pagesAcoustic Source Localization and Beamforming: Theory and PracticeKhalil HsaineNo ratings yet
- Sensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaDocument19 pagesSensors: Joint Detection and DOA Tracking With A Bernoulli Filter Based On Information Theoretic CriteriaSupermanNo ratings yet
- Power System Harmonics Estimation Using Linear Least Squares Method andDocument6 pagesPower System Harmonics Estimation Using Linear Least Squares Method andVladimir BecejacNo ratings yet
- Automatic Crack Detection and Characterization During UltrasDocument6 pagesAutomatic Crack Detection and Characterization During Ultrasb3d.dharoharNo ratings yet
- Yan 2020Document13 pagesYan 2020sp911119No ratings yet
- TW-TOA Based Positioning in The Presence of Clock ImperfectionsDocument28 pagesTW-TOA Based Positioning in The Presence of Clock Imperfectionskarawhitaker06No ratings yet
- STMPM Early AccessDocument10 pagesSTMPM Early AccessReza JalilzadehNo ratings yet
- Research Article: A New Wavelet Threshold Determination Method Considering Interscale Correlation in Signal DenoisingDocument10 pagesResearch Article: A New Wavelet Threshold Determination Method Considering Interscale Correlation in Signal DenoisingAbdelkader RabahNo ratings yet
- Hawes Et Al. - 2017 - Bayesian Compressive Sensing Approaches For Direction of Arrival Estimation With Mutual Coupling EffectsDocument12 pagesHawes Et Al. - 2017 - Bayesian Compressive Sensing Approaches For Direction of Arrival Estimation With Mutual Coupling EffectsJavier MelendrezNo ratings yet
- Array Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksDocument17 pagesArray Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksTrilochan PanigrahiNo ratings yet
- Source Estimation Using Coprime Array: A Sparse Reconstruction PerspectiveDocument10 pagesSource Estimation Using Coprime Array: A Sparse Reconstruction PerspectiveWesley LeiteNo ratings yet
- Sensors: Reconfigurable Antenna Array Direction Finding System Based On A Fast Search AlgorithmDocument14 pagesSensors: Reconfigurable Antenna Array Direction Finding System Based On A Fast Search AlgorithmSYED IMRAN HUSSAINNo ratings yet
- On The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysDocument8 pagesOn The Application of The Global Matched Filter toDOA Estimation With Uniform Circular ArraysMuhammad KhawarNo ratings yet
- A Deep Learning Approach For The Estimation of Middleton Class-A Impulsive Noise ParametersDocument6 pagesA Deep Learning Approach For The Estimation of Middleton Class-A Impulsive Noise ParametersalelignNo ratings yet
- Going Deeper Into OSNR Estimation With CNNDocument17 pagesGoing Deeper Into OSNR Estimation With CNNLivingstone KimaroNo ratings yet
- A Novel DOA Estimation For Distributed Sources in An Impulsive Noise EnvironmentDocument16 pagesA Novel DOA Estimation For Distributed Sources in An Impulsive Noise Environmentrahul kumarNo ratings yet
- Low-PAPR OFDM Waveform Design For Radar and Communication SystemsDocument6 pagesLow-PAPR OFDM Waveform Design For Radar and Communication Systemssharmaald901No ratings yet
- Accurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationDocument7 pagesAccurate Angle-of-Arrival Measurement Using Particle Swarm OptimizationUtpal DasNo ratings yet
- Cram Er-Rao Bound For Localization With A Priori Knowledge On Biased Range MeasurementsDocument15 pagesCram Er-Rao Bound For Localization With A Priori Knowledge On Biased Range Measurementskhaledelwalid1645No ratings yet
- Direction-of-Arrival Estimation For Constant Modulus Signals Using A Structured Matrix Recovery TechniqueDocument32 pagesDirection-of-Arrival Estimation For Constant Modulus Signals Using A Structured Matrix Recovery TechniqueHongqing YuNo ratings yet
- Performance Comparison of Localization Techniques For Sequential WSN DiscoveryDocument5 pagesPerformance Comparison of Localization Techniques For Sequential WSN DiscoveryChinmay SahuNo ratings yet
- Adaptive Detection With Training Data in Partially HomogeneousDocument8 pagesAdaptive Detection With Training Data in Partially HomogeneousvasikasNo ratings yet
- Maximum Versoria Criterion-Based Robust Adaptive Filtering AlgorithmDocument5 pagesMaximum Versoria Criterion-Based Robust Adaptive Filtering Algorithmradha gulatiNo ratings yet
- SageDocument17 pagesSagedinhlivietNo ratings yet
- Joint Calibration Algorithm For Gain-Phase and MutDocument9 pagesJoint Calibration Algorithm For Gain-Phase and MutWang GuohuaNo ratings yet
- Attention Gated Encoder-Decoder For Ultrasonic Signal DenoisingDocument9 pagesAttention Gated Encoder-Decoder For Ultrasonic Signal DenoisingIAES IJAINo ratings yet
- Wavelet Peakdet SechsDocument7 pagesWavelet Peakdet SechsPhilip EvansNo ratings yet
- Eigenvalue Based SsDocument12 pagesEigenvalue Based SsZeynep AtlasNo ratings yet
- An Overview of Neural Network Methods For Predicting Uncertainty in Atmospheric Remote SensingDocument34 pagesAn Overview of Neural Network Methods For Predicting Uncertainty in Atmospheric Remote Sensingllg971103No ratings yet
- High-Resolution Direct Position Determination Using MVDRDocument13 pagesHigh-Resolution Direct Position Determination Using MVDRMostafa NaseriNo ratings yet
- TSP CMC 16097Document15 pagesTSP CMC 16097Sadiq AkbarNo ratings yet
- Design and Analysis of Compressive Antenna Arrays For Direction of Arrival EstimationDocument14 pagesDesign and Analysis of Compressive Antenna Arrays For Direction of Arrival Estimationkhaledelwalid1645No ratings yet
- Signal Detection in Mimo Communications System With Non-Gaussian Noises Based On Deep Learning and Maximum Correntropy CriterionDocument16 pagesSignal Detection in Mimo Communications System With Non-Gaussian Noises Based On Deep Learning and Maximum Correntropy CriterionJohn BergNo ratings yet
- Wavelet Based SAR Speckle Reduction and Image CompressionDocument13 pagesWavelet Based SAR Speckle Reduction and Image CompressionkrishnakumariramNo ratings yet
- Progress in Electromagnetics Research B, Vol. 44, 241-259, 2012Document19 pagesProgress in Electromagnetics Research B, Vol. 44, 241-259, 2012nur narangNo ratings yet
- Rss-Based Localization in Wsns Using Gaussian Mixture Model Via Semidefinite RelaxationDocument4 pagesRss-Based Localization in Wsns Using Gaussian Mixture Model Via Semidefinite RelaxationNikhil SharmaNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- Analysis of Specified Capacity in Power BanksDocument8 pagesAnalysis of Specified Capacity in Power Bankslarbiwadi12No ratings yet
- Friction Coefficient of Steel On Concrete or GroutDocument7 pagesFriction Coefficient of Steel On Concrete or GroutLuis Ernesto Ramirez OsorioNo ratings yet
- Calculation Note Fire Escape Stairs 02032022Document22 pagesCalculation Note Fire Escape Stairs 02032022sobhiNo ratings yet
- Mcgraw Hill Inc Fluid Mechanics and HydrDocument807 pagesMcgraw Hill Inc Fluid Mechanics and Hydrcarinan julius100% (1)
- Aits 2223 PT I Jeea TD Paper 2Document15 pagesAits 2223 PT I Jeea TD Paper 2JustynNo ratings yet
- Akg7 DDocument1 pageAkg7 Daan_primaNo ratings yet
- Furnace EfficiencyDocument1 pageFurnace EfficiencySteve WanNo ratings yet
- 2001 Physics (AL) Paper 2Document28 pages2001 Physics (AL) Paper 2Deesse LauNo ratings yet
- Module 5 PDFDocument93 pagesModule 5 PDFVishal Shanmuga SundramNo ratings yet
- HKFYG Lee Shau Kee College 1 Examination (2022-2023) S.2 Integrated ScienceDocument14 pagesHKFYG Lee Shau Kee College 1 Examination (2022-2023) S.2 Integrated Scienceyle8227No ratings yet
- Chemsheets A2 1077 ElectrochemistryDocument46 pagesChemsheets A2 1077 Electrochemistrytonychenlondon1No ratings yet
- Casting Defects and Its Optimization Method in Centrifugal Casting Process: A ReviewDocument6 pagesCasting Defects and Its Optimization Method in Centrifugal Casting Process: A ReviewSangram ChougaleNo ratings yet
- Parameters Deduced From The Pressuremeter TestDocument8 pagesParameters Deduced From The Pressuremeter TestVICTOR ARMANDO PORTILLA YUPANQUINo ratings yet
- CHINA - Bejing Insfracture Investments - Tren de Baja y Mediana IntensidadDocument20 pagesCHINA - Bejing Insfracture Investments - Tren de Baja y Mediana IntensidadLa Punta EnelMundoNo ratings yet
- Power Steering (Diagnostics)Document52 pagesPower Steering (Diagnostics)rwNo ratings yet
- Practice Sheet: HH H H H HHDocument4 pagesPractice Sheet: HH H H H HHArvin PudotaNo ratings yet
- Eng Mechanics Unit 1-4 MCQS: Unit 1 - Resolution and Composition ofDocument106 pagesEng Mechanics Unit 1-4 MCQS: Unit 1 - Resolution and Composition ofAtul SheñdeNo ratings yet
- ARNU30GTBB4Document2 pagesARNU30GTBB4Cristian monsalve mendozaNo ratings yet
- Test Bank For Chemistry in Context 10th Edition American Chemical SocietyDocument23 pagesTest Bank For Chemistry in Context 10th Edition American Chemical Societykyodile9s8cm5No ratings yet
- Convective Heat Transfer PDFDocument13 pagesConvective Heat Transfer PDFCarlos Eduardo Noreña OssaNo ratings yet
- Suck My D: Cambridge O LevelDocument20 pagesSuck My D: Cambridge O LevelBasratul RafidNo ratings yet
- Precision 10 12 To 10 54 European Test DataDocument19 pagesPrecision 10 12 To 10 54 European Test DataDaniel PeluffoNo ratings yet
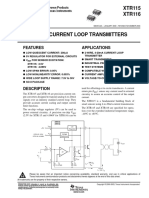
- XTR115 XTR116: Features ApplicationsDocument16 pagesXTR115 XTR116: Features ApplicationsHumberto RoddhuerNo ratings yet
- SME1307Document114 pagesSME1307Bakheit LayliNo ratings yet
- Chapter 2 Kinematic in 1D (Part 1) (PHY 130)Document26 pagesChapter 2 Kinematic in 1D (Part 1) (PHY 130)FiqajasmeNo ratings yet
- General Equations of 2nd DegreeDocument5 pagesGeneral Equations of 2nd DegreeSneha PaulNo ratings yet
- SR Inter IPE Question Bank Chapter-I (WAVES)Document10 pagesSR Inter IPE Question Bank Chapter-I (WAVES)sojakoj867No ratings yet
- 11-9 Polarization of LightDocument25 pages11-9 Polarization of LightCaroline RdzNo ratings yet
- Test No1 I. Circle The Word Whose Underlined Part Is Pronounced Differently From The RestDocument4 pagesTest No1 I. Circle The Word Whose Underlined Part Is Pronounced Differently From The Restmomobear152No ratings yet