Download as pdf or txt
You might also like
- David Morin - WavesDocument272 pagesDavid Morin - Wavesc1074376No ratings yet
- Chapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Document73 pagesChapter 11: Special Theory of Relativity: (Ref.: Marion & Heald, "Classical Electromagnetic Radiation," 3rd Ed., Ch. 14)Patrick SibandaNo ratings yet
- 1grDocument37 pages1grshaomahirNo ratings yet
- Lec - Notes On ElectromagnetismDocument26 pagesLec - Notes On ElectromagnetismHabyarimana ProjecteNo ratings yet
- Representation Theory of Lorentz Group PDFDocument16 pagesRepresentation Theory of Lorentz Group PDFursml12No ratings yet
- Lecture Notes On Cosmology (ns-tp430m) by Tomislav Prokopec Part I: An Introduction To The Einstein Theory of GravitationDocument37 pagesLecture Notes On Cosmology (ns-tp430m) by Tomislav Prokopec Part I: An Introduction To The Einstein Theory of GravitationEnzo SoLis GonzalezNo ratings yet
- RQM PDF 15296Document40 pagesRQM PDF 15296jaburicoNo ratings yet
- CHP 10Document68 pagesCHP 10user_14No ratings yet
- Lecture 10 (Spinors and The Dirac Equation) PDFDocument19 pagesLecture 10 (Spinors and The Dirac Equation) PDFSiti Fatimah100% (1)
- QFT BoccioDocument63 pagesQFT Bocciounima3610No ratings yet
- Spinors and The Dirac EquationDocument19 pagesSpinors and The Dirac EquationjaburicoNo ratings yet
- Markov ProcessDocument4 pagesMarkov ProcessParul VermaNo ratings yet
- 10.1515 - Zna 1989 0905Document10 pages10.1515 - Zna 1989 0905jandersen6169No ratings yet
- Spinors and The Dirac EquationDocument19 pagesSpinors and The Dirac EquationandysitobelloNo ratings yet
- AngmomDocument29 pagesAngmomYılmaz ÇolakNo ratings yet
- The Calculus of VariationsDocument52 pagesThe Calculus of VariationsKim HsiehNo ratings yet
- Fys3120: On The LORENTZ GROUPDocument9 pagesFys3120: On The LORENTZ GROUPMizanur RahmanNo ratings yet
- Appendix C Lorentz Group and The Dirac AlgebraDocument13 pagesAppendix C Lorentz Group and The Dirac AlgebraapuntesfisymatNo ratings yet
- QFT KleinGordonDocument71 pagesQFT KleinGordonbob n sauveNo ratings yet
- Spinors and The Dirac EquationDocument22 pagesSpinors and The Dirac Equationhimanshudhol25No ratings yet
- Classical FieldsDocument95 pagesClassical FieldsHari BilasiNo ratings yet
- Relativistic Quantum Mechanics: 6.1 The Klein-Gordon EquationDocument17 pagesRelativistic Quantum Mechanics: 6.1 The Klein-Gordon EquationGuillermoNo ratings yet
- Notes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias OsborneDocument97 pagesNotes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias Osbornedaniel_teivelisNo ratings yet
- JiekelunwenDocument4 pagesJiekelunwen张泽华No ratings yet
- Lecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?Document9 pagesLecture 1: Renormalization Groups David Gross 1.1. What Is Renormalization Group?luisdanielNo ratings yet
- 02 PlanewaveDocument8 pages02 PlanewaveAbu SafwanNo ratings yet
- Tensor PDFDocument25 pagesTensor PDFPero PericNo ratings yet
- Ising Field Theory-ZamolodchikovDocument158 pagesIsing Field Theory-ZamolodchikovМаксим БекетовNo ratings yet
- Calculation of Lyapunov Exponents in Time-Delayed SystemsDocument8 pagesCalculation of Lyapunov Exponents in Time-Delayed Systemscsernak2No ratings yet
- Numerical ApproachDocument32 pagesNumerical Approachjack jackNo ratings yet
- Complex WavesDocument4 pagesComplex WavesGodwin LarryNo ratings yet
- The Spin-Statistics Connection: Some Pedagogical Remarks in Response To Neuenschwander's QuestionDocument7 pagesThe Spin-Statistics Connection: Some Pedagogical Remarks in Response To Neuenschwander's QuestionRounak ChakrabortyNo ratings yet
- Notes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias OsborneDocument97 pagesNotes On Relativistic Quantum Field Theory: A Course Given by Dr. Tobias OsborneMaluco aNo ratings yet
- 2001-V Maume Deschamps PROJECTIVE METRICS AND Mixing Prperties On TowersDocument19 pages2001-V Maume Deschamps PROJECTIVE METRICS AND Mixing Prperties On Towerstekiyi3083No ratings yet
- The Dirac Equation: Physics Dep., University College CorkDocument28 pagesThe Dirac Equation: Physics Dep., University College CorkAlexandre Masson VicenteNo ratings yet
- Introduction To General Relativity - G. T.hooftDocument68 pagesIntroduction To General Relativity - G. T.hooftmostafa-tallat70No ratings yet
- Hydrodynamics in Two Dimensions and Vortex Theory : PhysicsDocument22 pagesHydrodynamics in Two Dimensions and Vortex Theory : Physicsyijat18183No ratings yet
- Emil Akhmedov - General Relativity Notes PDFDocument102 pagesEmil Akhmedov - General Relativity Notes PDFJudol Alejandro Rodriguez FrancoNo ratings yet
- Lecture On Linear TransformationDocument4 pagesLecture On Linear TransformationJayDonNo ratings yet
- Rho Is Invariant Under BoostDocument2 pagesRho Is Invariant Under Boost张泽华No ratings yet
- 0054 Handout 11Document19 pages0054 Handout 11zcaptNo ratings yet
- Leung-Kuang2006 Article OnTheChaoticDynamicsOfASphericDocument26 pagesLeung-Kuang2006 Article OnTheChaoticDynamicsOfASphericjaimeraisNo ratings yet
- Poincaré Group PDFDocument5 pagesPoincaré Group PDFFrancisco Fabián ArellanoNo ratings yet
- Preliminaries: What You Need To Know: Classical DynamicsDocument5 pagesPreliminaries: What You Need To Know: Classical Dynamicsclarkalel1No ratings yet
- Vector Calculus in Two DimensionsDocument27 pagesVector Calculus in Two DimensionsAndreea MoldoveanuNo ratings yet
- SLE AT2003preprintDocument12 pagesSLE AT2003preprintHuong Cam ThuyNo ratings yet
- Notes gr20Document77 pagesNotes gr20MatejaBoskovicNo ratings yet
- Lectures On General Relativity: Mehrdad Mirbabayi ICTP Diploma Program, 2018Document76 pagesLectures On General Relativity: Mehrdad Mirbabayi ICTP Diploma Program, 2018MatejaBoskovicNo ratings yet
- A Note On Particle Kinematics in Ho Rava-Lifshitz ScenariosDocument8 pagesA Note On Particle Kinematics in Ho Rava-Lifshitz ScenariosAlexandros KouretsisNo ratings yet
- 12354687898kine Mapp MaticsDocument27 pages12354687898kine Mapp MaticsDeepakNo ratings yet
- CH01Document46 pagesCH01Alejandro CarbajalNo ratings yet
- Shape of Relativistically Moving ObjectsDocument9 pagesShape of Relativistically Moving ObjectsDalimil MazáčNo ratings yet
- Z Transform SupplementDocument9 pagesZ Transform SupplementSummer KoNo ratings yet
- ch3 Special RelativityDocument6 pagesch3 Special RelativitybilalhussainsamtiaNo ratings yet
- Linear Transitivity CriteriaDocument9 pagesLinear Transitivity CriteriaEmmanuel Vásquez OtañezNo ratings yet
- Additional Theory For Module 4: Dynamic Analysis: Eigensolution ExampleDocument7 pagesAdditional Theory For Module 4: Dynamic Analysis: Eigensolution ExamplephysicsnewblolNo ratings yet
- chm305 Lecture2 PDFDocument6 pageschm305 Lecture2 PDFJan Harry EstuyeNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121From EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121No ratings yet
- A.C. Frequency Sonometer by MR - Charis Israel AnchaDocument3 pagesA.C. Frequency Sonometer by MR - Charis Israel AnchaCharis Israel AnchaNo ratings yet
- Relations and DigraphsDocument2 pagesRelations and DigraphsKarl FajardoNo ratings yet
- Instrumentation Catalog: PT Arita Prima Indonesia TBKDocument28 pagesInstrumentation Catalog: PT Arita Prima Indonesia TBKKenny YjwNo ratings yet
- Renold SSDocument6 pagesRenold SSmichael KetselaNo ratings yet
- Ma6452 Statistics and Numerical Methods Mathematics IIDocument14 pagesMa6452 Statistics and Numerical Methods Mathematics IITishbian MeshachNo ratings yet
- Structural IrregularitiesDocument14 pagesStructural IrregularitiesAnkit Dalvi100% (1)
- J (UV ( - MZH$) : Series PPQQA/1 SET 2Document11 pagesJ (UV ( - MZH$) : Series PPQQA/1 SET 2R SubbaramaiahNo ratings yet
- Dosha Head Work DesignDocument189 pagesDosha Head Work DesignAbiued EjigueNo ratings yet
- CALCULUS (AutoRecovered)Document7 pagesCALCULUS (AutoRecovered)Carl Eugene de LemosNo ratings yet
- Goofball Grammar FREE Edition by CEPIDocument35 pagesGoofball Grammar FREE Edition by CEPIusama khanNo ratings yet
- Astm C 403Document7 pagesAstm C 403elygq0% (1)
- Load CellsDocument2 pagesLoad CellsMUHAMMAD HANZALANo ratings yet
- Worksheet F Ch6Document3 pagesWorksheet F Ch6PeewoopNo ratings yet
- Building A Simple Pendulum and Measuring Motion With Arduino and PythonDocument10 pagesBuilding A Simple Pendulum and Measuring Motion With Arduino and PythonSarifudin HusniNo ratings yet
- 06 Linear Elasticity 03 AnisotropyDocument10 pages06 Linear Elasticity 03 Anisotropymihir bodryaNo ratings yet
- Pulse Firing BasicsDocument3 pagesPulse Firing BasicsdrbaneNo ratings yet
- Gate 2022: Mechanical EngineeringDocument26 pagesGate 2022: Mechanical EngineeringHothr KesNo ratings yet
- How To Use A Digital TalismanDocument13 pagesHow To Use A Digital TalismanMadeleiGOOGYX100% (1)
- Bond Strength of Denture Teeth To Heat-Cured, CADCAMDocument7 pagesBond Strength of Denture Teeth To Heat-Cured, CADCAMBharath KondaveetiNo ratings yet
- Sheet-Piles Design Using Free-Earth Support MethodDocument7 pagesSheet-Piles Design Using Free-Earth Support MethodJulien MhannaNo ratings yet
- A Comprehensive Review On Recent Developments in Ohmic and Schottky Contacts On Ga2O3 For Device ApplicationsDocument40 pagesA Comprehensive Review On Recent Developments in Ohmic and Schottky Contacts On Ga2O3 For Device ApplicationsdebmallyNo ratings yet
- AAOS 66765 1 en 0904Document40 pagesAAOS 66765 1 en 0904Mahmoud AfifyNo ratings yet
- Radiation Heat Transfer: Amit KakkarDocument11 pagesRadiation Heat Transfer: Amit KakkarRupesh TiwariNo ratings yet
- H100 Installation IntroductionDocument48 pagesH100 Installation Introductiongerente soportec100% (1)
- Social Science Natural Science and HumanitiesDocument26 pagesSocial Science Natural Science and HumanitiescolasikennethNo ratings yet
- Compound Microscopes Instruction Manual: RETAIN ALL PACKAGING in Case You Need To Return The MicroscopeDocument6 pagesCompound Microscopes Instruction Manual: RETAIN ALL PACKAGING in Case You Need To Return The MicroscopeRoshan KashyapNo ratings yet
- Longitudinal Vibration BarsDocument83 pagesLongitudinal Vibration BarsGerson Cordoba Barco75% (4)
- Map of Quantum Optics PDFDocument1 pageMap of Quantum Optics PDFInuk YouNo ratings yet
- Sai Traders Crackers - Catalogue 2023Document31 pagesSai Traders Crackers - Catalogue 2023gojothehonouredone99No ratings yet
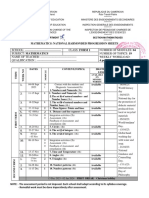
- MATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Document14 pagesMATHEMATICS - National Harmonised Progression Sheet. 1st Cycle 2023-2024Valere DJOHNo ratings yet