Download as pdf or txt
You might also like
- From Classical To Quantum Fields PDFDocument951 pagesFrom Classical To Quantum Fields PDFPedroVázquezPeña100% (5)
- Shearing Stress of Beams: For Hinged-Ended ColumnsDocument4 pagesShearing Stress of Beams: For Hinged-Ended ColumnsAbegail A Maga100% (2)
- Prayer in TobitDocument23 pagesPrayer in TobitDinesh JenekarNo ratings yet
- Goldstein 18 21 13 14 20Document15 pagesGoldstein 18 21 13 14 20Abdul Shakoor ButtNo ratings yet
- Engineering Mechanics EbooksDocument23 pagesEngineering Mechanics EbooksAshay Sanjay PatilNo ratings yet
- Case Study of Power Transmission - Group 4 Member: Problem 1: How Do We Get Following Expressions of Belt Drives ?Document2 pagesCase Study of Power Transmission - Group 4 Member: Problem 1: How Do We Get Following Expressions of Belt Drives ?Hải Hoàng LýNo ratings yet
- Physics Booklet-Pages-945-955Document11 pagesPhysics Booklet-Pages-945-955Aditya VyasNo ratings yet
- Design of Base Plates: M C D N C BDocument6 pagesDesign of Base Plates: M C D N C BJoseph LagalagotNo ratings yet
- 4.forced VibrationsDocument62 pages4.forced Vibrationspiravi66No ratings yet
- Aits 1819 FT I Jeea Paper 2 SolDocument10 pagesAits 1819 FT I Jeea Paper 2 SolhimanshuNo ratings yet
- Fbdof Sino Fac Two Force: Me 323: Mechanics of Materials Homework Set H03 Summer 2021Document2 pagesFbdof Sino Fac Two Force: Me 323: Mechanics of Materials Homework Set H03 Summer 2021Potatoes123No ratings yet
- L18 Conservation of Momentum Hirotaka SatoDocument36 pagesL18 Conservation of Momentum Hirotaka SatoImperial ReckerNo ratings yet
- FormularyDocument1 pageFormularyIshanka Praneeth ThennakoonNo ratings yet
- SPH3U Formula Sheet Fall 2020 1 PDFDocument2 pagesSPH3U Formula Sheet Fall 2020 1 PDFUzmaNo ratings yet
- PendulumDocument3 pagesPendulumTấn VinhNo ratings yet
- Chapter 3. Specific Energy and Control Section: BFC21103 HydraulicsDocument79 pagesChapter 3. Specific Energy and Control Section: BFC21103 Hydraulicsnurizzati hasmiNo ratings yet
- Mechanics - Handout 02Document15 pagesMechanics - Handout 02marcoNo ratings yet
- Midterm Formula Statistics Department Faculty of Science Chiang Mai University 1. or 5. 6. 7Document2 pagesMidterm Formula Statistics Department Faculty of Science Chiang Mai University 1. or 5. 6. 7NantaTarikaNo ratings yet
- Paper-1: Hints & SolutionsDocument15 pagesPaper-1: Hints & SolutionsAkhilesh kumarNo ratings yet
- 3 Problems Vectors Force SystemsDocument37 pages3 Problems Vectors Force Systemsmsi appleNo ratings yet
- Switchedcapacitor 150712214807 Lva1 App6891 PDFDocument57 pagesSwitchedcapacitor 150712214807 Lva1 App6891 PDFAyoub Le GuerrierNo ratings yet
- X AUNI Sem22 DiriDocument4 pagesX AUNI Sem22 DiriJulio TuyaNo ratings yet
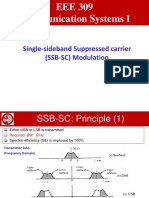
- EEE 309 Communication Systems I: Single-Sideband Suppressed Carrier (SSB-SC) ModulationDocument21 pagesEEE 309 Communication Systems I: Single-Sideband Suppressed Carrier (SSB-SC) ModulationRaihan AliNo ratings yet
- Synchronous Generator Capability Curve: EE341 Energy Conversion Ali Keyhani Synchronous Machines Lecture #4Document29 pagesSynchronous Generator Capability Curve: EE341 Energy Conversion Ali Keyhani Synchronous Machines Lecture #4luhusapa-1No ratings yet
- Shear TensionDocument12 pagesShear TensionSaud N. AdemNo ratings yet
- AITS 1819 FT X ADV PAPER 2 SolDocument13 pagesAITS 1819 FT X ADV PAPER 2 SolDEBJIT SHARMANo ratings yet
- EMTP-RV TRV-SWTDocument31 pagesEMTP-RV TRV-SWTboopathivpNo ratings yet
- IFoS - Previous Years Questions 2000 - 11 (Complex Analysis)Document2 pagesIFoS - Previous Years Questions 2000 - 11 (Complex Analysis)RavikanthNo ratings yet
- Cb7b170c 080e 465f A881 60caacc97670N.L.M Exercise With Solution DoneDocument24 pagesCb7b170c 080e 465f A881 60caacc97670N.L.M Exercise With Solution DoneShuvanshu GuptaNo ratings yet
- Theme From James Bond - 007 Alto Sax 1Document1 pageTheme From James Bond - 007 Alto Sax 1DarlanSantosNo ratings yet
- Fluid Mechanics Formula SheetDocument2 pagesFluid Mechanics Formula SheetRahulNo ratings yet
- Solutions of GTM 21 (1st Sep)Document6 pagesSolutions of GTM 21 (1st Sep)rameshNo ratings yet
- Lecture 1 Forces, Stress and StrainDocument40 pagesLecture 1 Forces, Stress and StrainKeran DiasNo ratings yet
- RF - Ma: - M DT (G - MDocument4 pagesRF - Ma: - M DT (G - MJuanCamiloReginoParraNo ratings yet
- Moments and Turning EffectsDocument3 pagesMoments and Turning EffectsMr.gamer play itNo ratings yet
- ExercisesInClass 2 PDF Eng 20190914Document3 pagesExercisesInClass 2 PDF Eng 20190914TOAN DuNo ratings yet
- Canal de MedicionDocument6 pagesCanal de MedicionRICHARDNo ratings yet
- In-Class 06 AnsDocument1 pageIn-Class 06 AnsTdoc TonyNo ratings yet
- Exercicios ACDocument16 pagesExercicios ACmiguelmarquesmiranda1No ratings yet
- T FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberDocument4 pagesT FF R 1 2 F FF 33,000 FF V HP : Case Study of Power Transmission - Group 4 MemberHải Hoàng LýNo ratings yet
- المحاضرة 5Document15 pagesالمحاضرة 5عبدالله باسم خلاوي مانعNo ratings yet
- Note 19-Feb-2024Document19 pagesNote 19-Feb-2024Manikandan MNo ratings yet
- Statics - Tufree Midterm 2-2561 PDFDocument17 pagesStatics - Tufree Midterm 2-2561 PDFมิตร อันมาNo ratings yet
- Foundation of Re-Normalized Synergetics:: Issues of Computability and ComplexityDocument17 pagesFoundation of Re-Normalized Synergetics:: Issues of Computability and ComplexityMilan JovovicNo ratings yet
- 計算機組織期中考答案紙Document9 pages計算機組織期中考答案紙joanne.chentw123No ratings yet
- Unit 4 Synch MachinesDocument110 pagesUnit 4 Synch MachinesHimanshu ChaudharyNo ratings yet
- 05 Exam - FormulaDocument2 pages05 Exam - FormulaRobert BevinsNo ratings yet
- Neet 2021 Physics Paper With SolutionDocument13 pagesNeet 2021 Physics Paper With SolutionAnilNo ratings yet
- 06 ShearDocument32 pages06 ShearNathan MolongwanaNo ratings yet
- The If: FingersDocument12 pagesThe If: FingersRiddhi SheteNo ratings yet
- 1.c. & 2.a. Forced VibrationsDocument62 pages1.c. & 2.a. Forced VibrationsPrajwal CNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAshish Kumar JhaNo ratings yet
- Force Analysis of Spur Gears PDFDocument5 pagesForce Analysis of Spur Gears PDFAnurag JangraNo ratings yet
- Breaker2 Breaker1 Breaker: Powe RguiDocument1 pageBreaker2 Breaker1 Breaker: Powe RguiMahdi BelaNo ratings yet
- Cheat Sheet of PhysicsDocument6 pagesCheat Sheet of Physicsaliayanraza5No ratings yet
- Assignment 1 BDA10902313133321233 Sem2 1718Document10 pagesAssignment 1 BDA10902313133321233 Sem2 1718Saiful AzrieNo ratings yet
- More - Trombone 4Document2 pagesMore - Trombone 4Caper RHNo ratings yet
- Chapter 5-Momentum-And-ImpulseDocument23 pagesChapter 5-Momentum-And-ImpulseA. BaseerNo ratings yet
- L09 - 1DOF Forced Vibration - Isolation - AppendixDocument1 pageL09 - 1DOF Forced Vibration - Isolation - AppendixMogaNo ratings yet
- MIT16 522S15 Lecture17Document5 pagesMIT16 522S15 Lecture17lololol 1010101No ratings yet
- SIISyG2017 - Mg. Calixtro Yanqui - Granular Mechanics of The Seismic Lateral Earth Pressure Om Rigid Retainig WallsDocument29 pagesSIISyG2017 - Mg. Calixtro Yanqui - Granular Mechanics of The Seismic Lateral Earth Pressure Om Rigid Retainig WallsHiden Jaime Machaca HuancolloNo ratings yet
- Coax Temp Attenuation Tech TipDocument3 pagesCoax Temp Attenuation Tech TipCarlos A. Galeano A.No ratings yet
- Design and Control of An LCL Filter Based Three Phase Active RectifierDocument11 pagesDesign and Control of An LCL Filter Based Three Phase Active RectifierTravis GrayNo ratings yet
- Waves in Three-Dimensional Solid: A ElasticDocument22 pagesWaves in Three-Dimensional Solid: A ElasticaguiiahimNo ratings yet
- Spin Stabilized Magnetic Levitation: Martin D. SimonDocument7 pagesSpin Stabilized Magnetic Levitation: Martin D. SimonValaelNo ratings yet
- Exergy, Its Potential and Limitations in EnvironmentalDocument12 pagesExergy, Its Potential and Limitations in EnvironmentalPelita HidupNo ratings yet
- Lab Manual For Soil TestingDocument60 pagesLab Manual For Soil TestingVM2009100% (2)
- Response Evaluation: Part 3 - Izet MEHMETAJDocument50 pagesResponse Evaluation: Part 3 - Izet MEHMETAJIzet MehmetajNo ratings yet
- Origin of Quantum-Mechanical Complementarity Probed by A 'Which-Way' Experiment in An Atom InterferometerDocument5 pagesOrigin of Quantum-Mechanical Complementarity Probed by A 'Which-Way' Experiment in An Atom InterferometerDevenderNo ratings yet
- Chapter 15 - Oscillations - Solutions PDFDocument9 pagesChapter 15 - Oscillations - Solutions PDFrobin bhalroyNo ratings yet
- Tibetan Singing Bowls - Denis Terwagne and John W.M. BushDocument22 pagesTibetan Singing Bowls - Denis Terwagne and John W.M. Bush22nd Century Music100% (1)
- Lecture 5& 6sun Orientation PDFDocument29 pagesLecture 5& 6sun Orientation PDFSanchita JhaNo ratings yet
- SPE 89518 Predicting Coiled-Tubing Failure Below Injector: WWW - Petroman.irDocument5 pagesSPE 89518 Predicting Coiled-Tubing Failure Below Injector: WWW - Petroman.irmsmsoftNo ratings yet
- Applications of MRI in Biomedical EngineeringDocument33 pagesApplications of MRI in Biomedical Engineeringbrian8576No ratings yet
- MotionDocument51 pagesMotionJohanna Marie SorianoNo ratings yet
- Modulus of Elasticity or Young's Modulus - and Tensile Modulus For Common MaterialsDocument5 pagesModulus of Elasticity or Young's Modulus - and Tensile Modulus For Common MaterialsTabishNo ratings yet
- DRB - Lecture - Kinematics of Curvilinear TranslationDocument6 pagesDRB - Lecture - Kinematics of Curvilinear TranslationLauderdale De JoseNo ratings yet
- RT Review - 6Document25 pagesRT Review - 6Hao TranNo ratings yet
- Workshop 6 1D Shock Propagation: Introduction To ANSYS Explicit STRDocument20 pagesWorkshop 6 1D Shock Propagation: Introduction To ANSYS Explicit STRCosmin ConduracheNo ratings yet
- Comparison of Finite-Element and IEC Methods For Cable Thermal Analysis Under Various Operating EnvironmentsDocument6 pagesComparison of Finite-Element and IEC Methods For Cable Thermal Analysis Under Various Operating EnvironmentsDamian AegerterNo ratings yet
- Mee1003 Engineering-Thermodynamics TH 1.1 47 Mee1003 13Document2 pagesMee1003 Engineering-Thermodynamics TH 1.1 47 Mee1003 13سيد محمود بن مسرورNo ratings yet
- Book Engineering Acoustics.2004Document205 pagesBook Engineering Acoustics.2004Yuan ChengNo ratings yet
- Carlo Rovelli - The Order of Time - SummaryDocument8 pagesCarlo Rovelli - The Order of Time - SummaryBianca Mihaela ConstantinNo ratings yet
- Molecular Structure HOMO LUMO MEP Natural Bond OrbDocument13 pagesMolecular Structure HOMO LUMO MEP Natural Bond OrbRakhel Dayanne SilvaNo ratings yet
- Kruegel E. The Physics of Interstellar Dust (IoP, 2003) (584s)Document584 pagesKruegel E. The Physics of Interstellar Dust (IoP, 2003) (584s)Batominovski100% (3)
- Electron Scattering and Nuclear Structure PDFDocument44 pagesElectron Scattering and Nuclear Structure PDFFernanda RibeiroNo ratings yet
- Article JTAC2Document8 pagesArticle JTAC2Arbaz KhanNo ratings yet
- IS Code 14591Document17 pagesIS Code 14591bikramjit debNo ratings yet
- Sixfold EightfoldDocument54 pagesSixfold EightfoldIan BeardsleyNo ratings yet