Download as pdf or txt
You might also like
- Understanding Machine Learning From Theory To Algorithms 1st Edition Shwartz Solutions ManualDocument11 pagesUnderstanding Machine Learning From Theory To Algorithms 1st Edition Shwartz Solutions ManualChristinaCrawfordfbsyo100% (18)
- Chapter 5 - Theory of ProductionDocument11 pagesChapter 5 - Theory of ProductionWingmannuuNo ratings yet
- 15.welding Engineering PDFDocument15 pages15.welding Engineering PDFEmad A.Ahmad100% (2)
- Data Analysis With Microsoft ExcelDocument532 pagesData Analysis With Microsoft ExcelLULUAREN88% (16)
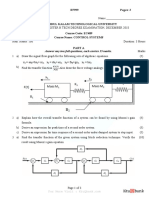
- Old Question Paper Control SystemsDocument7 pagesOld Question Paper Control SystemsSatendra KushwahaNo ratings yet
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatNo ratings yet
- Gujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMDocument3 pagesGujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMvisupinuNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- Ele 2223 LCT-1Document3 pagesEle 2223 LCT-1shreyashmagic99No ratings yet
- Control SystemDocument31 pagesControl SystemDeepak ThapaNo ratings yet
- Answer Any Two Full Questions, Each Carries 15 MarksDocument3 pagesAnswer Any Two Full Questions, Each Carries 15 MarkskayyurNo ratings yet
- Dec. EC409-C - Ktu QbankDocument3 pagesDec. EC409-C - Ktu QbankNISHANT KUMARNo ratings yet
- 21EC63 Model Question PaperDocument3 pages21EC63 Model Question PaperDARSHAN DARSHNo ratings yet
- BMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester Examinationskoushik bhatNo ratings yet
- Svcet: B.E"/B.Tech. Degree Examination, November/December 2005Document3 pagesSvcet: B.E"/B.Tech. Degree Examination, November/December 2005lllllllllllNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityfeyayel988No ratings yet
- Ect307 Control Systems, December 2021Document4 pagesEct307 Control Systems, December 2021Dinil DhananjayanNo ratings yet
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- 15es4gccst PDFDocument3 pages15es4gccst PDFkoushik bhatNo ratings yet
- 2020-09-18SupplementaryEC409EC409-E - Ktu QbankDocument3 pages2020-09-18SupplementaryEC409EC409-E - Ktu QbankArjun S KumarNo ratings yet
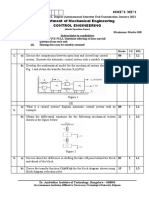
- Me71 Model QP 2022Document3 pagesMe71 Model QP 2022Pramod RajNo ratings yet
- Advanced Control Theory (Eee)Document3 pagesAdvanced Control Theory (Eee)Adarsh VkNo ratings yet
- EC409 Control SystemsDocument12 pagesEC409 Control SystemsSuryakanta PattanaikNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.VinayNo ratings yet
- 22 23Document2 pages22 23Goura Sundar TripathyNo ratings yet
- CEMECHQP2Document2 pagesCEMECHQP2srikanthNo ratings yet
- 6th Sem PapersDocument12 pages6th Sem Papers21BEE044 MANOJ KHEMANINo ratings yet
- 19ec4251 && Control SystemsDocument5 pages19ec4251 && Control SystemsVeeramaniNo ratings yet
- II B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsDocument8 pagesII B.Tech II Semester, Regular Examinations, April/May - 2012 Control SystemsViswa ChaitanyaNo ratings yet
- Control SystemDocument2 pagesControl Systemguru.rjpmNo ratings yet
- Answer Any Two Full Questions, Each Carries 15 MarksDocument3 pagesAnswer Any Two Full Questions, Each Carries 15 MarksOlNo ratings yet
- 18BM44 - 2022Document3 pages18BM44 - 2022Lakshmi PriyaNo ratings yet
- EE3301Document3 pagesEE3301Charandeep TirkeyNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.rfdggfyhrtyb gfhjh tjNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityMORESAGARNo ratings yet
- Nr-220206 Control SystemsDocument8 pagesNr-220206 Control SystemsSrinivasa Rao G100% (1)
- Question Paper Code: 18641: Reg. NoDocument4 pagesQuestion Paper Code: 18641: Reg. NoNaveen Raj ENo ratings yet
- EC8391 - Control Systems EngineeringDocument3 pagesEC8391 - Control Systems Engineeringsyed1188No ratings yet
- MAKEUPDocument3 pagesMAKEUPsaikar.challaNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityShivam PanchalNo ratings yet
- Tutorial 6Document3 pagesTutorial 6Gaurav ANo ratings yet
- Tutorial 8Document2 pagesTutorial 8Gaurav ANo ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- Control SystemsDocument8 pagesControl SystemsammukeeruNo ratings yet
- CST - W2022Document2 pagesCST - W2022Shivam PanchalNo ratings yet
- 22 ESC143 Set 2Document2 pages22 ESC143 Set 2meghanadc20No ratings yet
- PTEE7301 April-2022Document3 pagesPTEE7301 April-2022imman46920No ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- IES EE C 1991 (Electrical Guru - Blogspot.in)Document8 pagesIES EE C 1991 (Electrical Guru - Blogspot.in)Tanmay PokaleNo ratings yet
- Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - inDocument2 pagesDrttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - in Drttit - Gvet.edu - inrama KrishnaNo ratings yet
- Ece441 CaDocument2 pagesEce441 CaIfeoluwa DareNo ratings yet
- Mech3418 Ca 2016Document4 pagesMech3418 Ca 2016Barry PoonNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityRenieNo ratings yet
- Control System Question PaperDocument2 pagesControl System Question PaperKishor GooddayNo ratings yet
- 21 22Document2 pages21 22Goura Sundar TripathyNo ratings yet
- rr320201 Analysis of Linear SystemsDocument11 pagesrr320201 Analysis of Linear SystemsSRINIVASA RAO GANTANo ratings yet
- Network Analysis and Synthesis: Code: EC3T4Document4 pagesNetwork Analysis and Synthesis: Code: EC3T4Alumni GECNo ratings yet
- 9A02503 Control SystemsDocument4 pages9A02503 Control SystemssivabharathamurthyNo ratings yet
- Electrical Machines Controls. Ree409Document4 pagesElectrical Machines Controls. Ree409Arshad SaifiNo ratings yet
- nr310101 Hydraulics and Hydraulic Machinery Set1Document11 pagesnr310101 Hydraulics and Hydraulic Machinery Set1SRINIVASA RAO GANTANo ratings yet
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)From EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)No ratings yet
- Robust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationFrom EverandRobust Adaptive Control for Fractional-Order Systems with Disturbance and SaturationNo ratings yet
- DiGITAL IMAGE PROCESSING SyllabusDocument1 pageDiGITAL IMAGE PROCESSING Syllabusveera401No ratings yet
- 169 Physics Sir JeeDocument19 pages169 Physics Sir JeeTaga RamNo ratings yet
- Cep Halo MetricsDocument6 pagesCep Halo MetricsAgia Tessa AndrianiNo ratings yet
- Final Question Bank - DSPDocument32 pagesFinal Question Bank - DSPsachinNo ratings yet
- Chapter-3: Trigonometric Functions: MCQ / One Mark QuestionsDocument2 pagesChapter-3: Trigonometric Functions: MCQ / One Mark Questionssushil tripathiNo ratings yet
- Preeti Soni Lecturer (C S E) Rsrrcet Bhilai, C.GDocument61 pagesPreeti Soni Lecturer (C S E) Rsrrcet Bhilai, C.GBhupesh PandeyNo ratings yet
- Hidden MessageDocument5 pagesHidden MessageMakylaNo ratings yet
- Calculation PP Piping SystemDocument24 pagesCalculation PP Piping SystemDavid FonsecaNo ratings yet
- 30 Decimal Fraction Aptitude Questions With SolutionsDocument10 pages30 Decimal Fraction Aptitude Questions With SolutionsGHAPRC RUDRAPURNo ratings yet
- T.C.S. Paper On 15Th January at Uit - RGPV (Gec) BhopalDocument4 pagesT.C.S. Paper On 15Th January at Uit - RGPV (Gec) BhopalVivek ChandNo ratings yet
- Major Assignment F21 (Friday)Document4 pagesMajor Assignment F21 (Friday)sapna thakurNo ratings yet
- Engineering-Mechanics (Chapter 8)Document33 pagesEngineering-Mechanics (Chapter 8)noahNo ratings yet
- Surface DevelopmentDocument11 pagesSurface DevelopmentSiddhant SidNo ratings yet
- Estimation PDFDocument348 pagesEstimation PDFA SanthakumaranNo ratings yet
- CMAT Model Question - 2Document5 pagesCMAT Model Question - 2Ankit SubediNo ratings yet
- Events & Their Operations: Module in Mathematics 10 Third QuarterDocument7 pagesEvents & Their Operations: Module in Mathematics 10 Third QuarterBilly Jasper DomingoNo ratings yet
- 02 Natcon - Victoria UniversityDocument76 pages02 Natcon - Victoria UniversityOsama IbrahimNo ratings yet
- Math F212 OptiDocument3 pagesMath F212 OptiShivam KediaNo ratings yet
- StewartPCalc7 01 04 OutputDocument33 pagesStewartPCalc7 01 04 OutputrawadNo ratings yet
- Avatarme: Realistically Renderable 3D Facial Reconstruction "In-The-Wild"Document10 pagesAvatarme: Realistically Renderable 3D Facial Reconstruction "In-The-Wild"Joseph OmisNo ratings yet
- Evaluating LimitsDocument8 pagesEvaluating Limitssumsyed786No ratings yet
- Chapter 3Document48 pagesChapter 3Karena GillNo ratings yet
- Sinumerik 840D SL - 828D - ISO Turning PDFDocument214 pagesSinumerik 840D SL - 828D - ISO Turning PDFLincoln AntonioNo ratings yet
- The Enhanced Entity-Relationship (EER) ModelDocument42 pagesThe Enhanced Entity-Relationship (EER) ModelAhmed AjeenaNo ratings yet
- KS3 Quiz (Circles)Document4 pagesKS3 Quiz (Circles)prewed fotoNo ratings yet