Download as pdf or txt
You might also like
- Jabsco 15780-0000 Parts ListDocument2 pagesJabsco 15780-0000 Parts ListClarence Clar100% (1)
- Geriatric Consideration in NursingDocument31 pagesGeriatric Consideration in NursingBabita Dhruw100% (5)
- Robotics - PresentationDocument57 pagesRobotics - PresentationAnonymous YkDJkSqNo ratings yet
- Afar 2 - Summative Test (Consolidated) Theories: Realized in The Second Year From Upstream Sales Made in Both YearsDocument23 pagesAfar 2 - Summative Test (Consolidated) Theories: Realized in The Second Year From Upstream Sales Made in Both YearsVon Andrei Medina100% (1)
- The Role of Electronics in Robotics: S.Chitra & S.NishaDocument43 pagesThe Role of Electronics in Robotics: S.Chitra & S.Nishaharishan_sciNo ratings yet
- RoboticsDocument53 pagesRoboticsWaseem QassabNo ratings yet
- Automation & Artificial Intelligence: Robots and Their ApplicationsDocument93 pagesAutomation & Artificial Intelligence: Robots and Their ApplicationsManal AndhereNo ratings yet
- 1 A Inishantonrobotics-130912002640-Phpapp02Document31 pages1 A Inishantonrobotics-130912002640-Phpapp02SELVAKUMAR RNo ratings yet
- Robots Taking Our JobsDocument23 pagesRobots Taking Our JobsGb NYlztEnNo ratings yet
- Unit-1 (Part 1)Document48 pagesUnit-1 (Part 1)jaiganeshNo ratings yet
- Intro RoboticsDocument49 pagesIntro Roboticsariff05100% (2)
- Submitted By:-Harshal Awale ROLL NO: - 11031M02017Document25 pagesSubmitted By:-Harshal Awale ROLL NO: - 11031M02017Sneha SandyNo ratings yet
- 4A IntroDocument47 pages4A IntroparmodrtkNo ratings yet
- 2.introduction To RoboticsDocument65 pages2.introduction To RoboticsSachidhanandam MNo ratings yet
- Introduction To RoboticDocument51 pagesIntroduction To RoboticMASOUDNo ratings yet
- RoboticsDocument39 pagesRoboticsShameer Phy100% (1)
- Intro 2 RoboticsDocument49 pagesIntro 2 Roboticsjudith bordanNo ratings yet
- introduction-to-roboticsDocument49 pagesintroduction-to-roboticselias durosinmiNo ratings yet
- Robotics: Where AI Meets Real WorldDocument36 pagesRobotics: Where AI Meets Real WorldMadhaw ShuklaNo ratings yet
- Robotics: Where AI Meets Real WorldDocument36 pagesRobotics: Where AI Meets Real WorldSantosh SamNo ratings yet
- Robotics: Where AI Meets Real WorldDocument36 pagesRobotics: Where AI Meets Real WorldPratik BariyaNo ratings yet
- Technical English Ii: Practical WorkDocument14 pagesTechnical English Ii: Practical WorkMelissa Haydee Acosta ArmoaNo ratings yet
- M.J Deepak Reddy Satyabama University, Chennai: Aeronautical EngineeringDocument29 pagesM.J Deepak Reddy Satyabama University, Chennai: Aeronautical EngineeringMahendranath RamakrishnanNo ratings yet
- Robotics (1207415)Document13 pagesRobotics (1207415)Vinit SalujaNo ratings yet
- Unit 1Document39 pagesUnit 1revathi swecNo ratings yet
- Lecture 1 Intro To Robotics - 221011 - 103012Document37 pagesLecture 1 Intro To Robotics - 221011 - 103012Domjul KumzhiNo ratings yet
- Robotic Intro: by Jefferson Rey J. Arroyo, ECEDocument39 pagesRobotic Intro: by Jefferson Rey J. Arroyo, ECELykaShanineGabrielMendozaNo ratings yet
- Robotics IntroDocument19 pagesRobotics IntrowazirkqasemNo ratings yet
- MBCPS 420_234_2223_22_08072023_9120Document41 pagesMBCPS 420_234_2223_22_08072023_9120CYRICK HOME OF MUSIC AND ENTERTAINMENTNo ratings yet
- Robotics: Robotics Is The Branch of Mechanical EngineeringDocument22 pagesRobotics: Robotics Is The Branch of Mechanical EngineeringShahriar SaifNo ratings yet
- RoboticsDocument42 pagesRoboticsMarini Pramod KumarNo ratings yet
- RoboticsDocument176 pagesRoboticsImoleoluwa OlayemiNo ratings yet
- 2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionDocument62 pages2-Brief History, Types of Robots, Degrees of Freedom of Robots, Robot configurations-13-Jul-2020Material - I - 13-Jul-2020 - IntroductionSPARSH RAJNo ratings yet
- Intro To RoboticsDocument36 pagesIntro To RoboticsDaniel Gómez LendínezNo ratings yet
- Mekatronika XiiiDocument21 pagesMekatronika XiiiAgus IkiNo ratings yet
- Robo Lecture 1Document39 pagesRobo Lecture 1Mayuri MeshramNo ratings yet
- RoboticsslideDocument11 pagesRoboticsslideapi-250479137No ratings yet
- Robotics Fall 2023 Week 1 21092023 123150pmDocument81 pagesRobotics Fall 2023 Week 1 21092023 123150pmWaqas ZafarNo ratings yet
- Unit1 - Basic ConceptsDocument73 pagesUnit1 - Basic ConceptsSharmila83No ratings yet
- RoboticsAndMechatronics IndustrialRobotics Part1 2021 CompressedDocument40 pagesRoboticsAndMechatronics IndustrialRobotics Part1 2021 Compressedayahalomari0roNo ratings yet
- Rra PDFDocument157 pagesRra PDFDawit shimelesNo ratings yet
- Fundamentals of Robotics: Ingeniería en ComputaciónDocument37 pagesFundamentals of Robotics: Ingeniería en Computaciónasnake dessieNo ratings yet
- Intro2robotics PPT SMRDocument48 pagesIntro2robotics PPT SMRapi-115728880No ratings yet
- Fundamentals of Robotics 01Document63 pagesFundamentals of Robotics 01noorulain66.csNo ratings yet
- Introduction To RoboticsDocument54 pagesIntroduction To RoboticsEjidokun TemitayoNo ratings yet
- Where Ai Meets The Real World.: WWW - Ankitjain.InfoDocument15 pagesWhere Ai Meets The Real World.: WWW - Ankitjain.Infodeepakkatyal_222No ratings yet
- Class 1 - General IntroductionDocument43 pagesClass 1 - General IntroductionDeepakNo ratings yet
- Robotics: R.U.R. (Rossum's Universal Robots)Document7 pagesRobotics: R.U.R. (Rossum's Universal Robots)Sky JarielNo ratings yet
- Robotics: A Seminar Report OnDocument17 pagesRobotics: A Seminar Report OnShoaib khanNo ratings yet
- CS312 Intro To RoboticsDocument25 pagesCS312 Intro To RoboticsErica Mae CañeteNo ratings yet
- Robotics: Lecture 1: Introduction To RoboticsDocument43 pagesRobotics: Lecture 1: Introduction To Roboticsnguyễn công nghĩaNo ratings yet
- Robotics: Lecture 1: Introduction To RoboticsDocument44 pagesRobotics: Lecture 1: Introduction To RoboticsRegino BetongNo ratings yet
- 9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005Document41 pages9-John J. Craig, "Introduction To Robotics Mechanics and Control", Third Edition, 2005tasenNo ratings yet
- On Robotic's (1) - 1Document23 pagesOn Robotic's (1) - 1Shivaraju HNo ratings yet
- RoboticsDocument76 pagesRoboticsvishesh Kumar singhNo ratings yet
- Biomedical RoboticsDocument28 pagesBiomedical RoboticszeeshanNo ratings yet
- Robotics 10 DLLDocument7 pagesRobotics 10 DLLshover solisNo ratings yet
- TBW PresentationDocument13 pagesTBW Presentationسیدہ ماریہNo ratings yet
- Introduction To RoboticsDocument63 pagesIntroduction To RoboticsHunterWigintonNo ratings yet
- Chapter 1Document50 pagesChapter 1Genet GezehagnNo ratings yet
- LectureOne Introduction To Robotics DrWasanDocument31 pagesLectureOne Introduction To Robotics DrWasanwasan.engNo ratings yet
- Bots! Robotics Engineering: with Hands-On Makerspace ActivitiesFrom EverandBots! Robotics Engineering: with Hands-On Makerspace ActivitiesRating: 5 out of 5 stars5/5 (2)
- An Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksFrom EverandAn Introduction to the Wonderful World of Robotics - Science Book for Kids | Children's Science Education BooksNo ratings yet
- Periodic TableDocument23 pagesPeriodic TableAndre AzarconNo ratings yet
- mapeh-10-tos-2nd-periodicalDocument2 pagesmapeh-10-tos-2nd-periodicalAndre AzarconNo ratings yet
- VolcanoesDocument46 pagesVolcanoesAndre AzarconNo ratings yet
- BiodiversityDocument9 pagesBiodiversityAndre AzarconNo ratings yet
- Portfolio rpmsDocument21 pagesPortfolio rpmsAndre AzarconNo ratings yet
- qualitiesofgoodresearcher-200306025328Document25 pagesqualitiesofgoodresearcher-200306025328Andre AzarconNo ratings yet
- RESEARCH METHODOLOGYDocument17 pagesRESEARCH METHODOLOGYAndre AzarconNo ratings yet
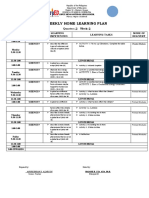
- Weekly Home Learning Plan: Quarter: 3 Week: 2Document2 pagesWeekly Home Learning Plan: Quarter: 3 Week: 2Andre AzarconNo ratings yet
- Module 1 ICTDocument21 pagesModule 1 ICTAndre AzarconNo ratings yet
- ESSAYDocument7 pagesESSAYKaren OliveraNo ratings yet
- Types of ParentingDocument13 pagesTypes of ParentingViseshNo ratings yet
- Markov Vs ArimaDocument93 pagesMarkov Vs ArimaDenBagoesNo ratings yet
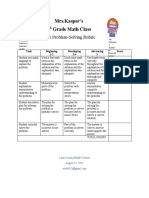
- Problemsolving RubricDocument1 pageProblemsolving Rubricapi-560491685No ratings yet
- sn74hct138 PDFDocument21 pagessn74hct138 PDFpabloNo ratings yet
- Applications Training For Integrex-100 400MkIII Series Mazatrol FusionDocument122 pagesApplications Training For Integrex-100 400MkIII Series Mazatrol Fusiontsaladyga100% (6)
- 3700 S 24 Rev 0 ENDocument3 pages3700 S 24 Rev 0 ENJoão CorrêaNo ratings yet
- Synchronous Alternators: Three-Phase BrushlessDocument5 pagesSynchronous Alternators: Three-Phase BrushlessĐại DươngNo ratings yet
- Drug Dosage and IV Rates Calculations PDFDocument6 pagesDrug Dosage and IV Rates Calculations PDFvarmaNo ratings yet
- Company Profile For ICB TechnimontDocument4 pagesCompany Profile For ICB TechnimontShankarMukherjeeNo ratings yet
- Factory Physics PrinciplesDocument20 pagesFactory Physics Principlespramit04100% (1)
- Brother 1660e Service ManualDocument117 pagesBrother 1660e Service ManualtraminerNo ratings yet
- Comunica CaoDocument5 pagesComunica Caosh3ll.sh4d0wNo ratings yet
- Title: Relationship Between PH and Chemiluminescence of Luminol Author: Rolando Efraín Hernández RamírezDocument2 pagesTitle: Relationship Between PH and Chemiluminescence of Luminol Author: Rolando Efraín Hernández RamírezEfraínNo ratings yet
- Fs Tco Battery Diesel Delivery Trucks Jun2022Document3 pagesFs Tco Battery Diesel Delivery Trucks Jun2022The International Council on Clean TransportationNo ratings yet
- 15p3 Fourier IntegralDocument7 pages15p3 Fourier IntegralBhargav BhalaraNo ratings yet
- Manual Tecnico Jblgo PDFDocument2 pagesManual Tecnico Jblgo PDFMarcosDanielSoaresNo ratings yet
- Marik ServitorsDocument20 pagesMarik ServitorsDWNloader100% (2)
- GDPR ReportDocument84 pagesGDPR ReportKingPlaysNo ratings yet
- MC&OB Unit 4Document17 pagesMC&OB Unit 4Tanya MalviyaNo ratings yet
- Basion Horizontal CobenDocument3 pagesBasion Horizontal CobenJegan KumarNo ratings yet
- Laboratory For Energy and The Environment: HighlightsDocument14 pagesLaboratory For Energy and The Environment: HighlightsZewdu TsegayeNo ratings yet
- DMX DC Motor ControllerDocument23 pagesDMX DC Motor ControlleromargarayNo ratings yet
- 115 Ballard Tommelein 2021 LPS Benchmark 2020 2Document125 pages115 Ballard Tommelein 2021 LPS Benchmark 2020 2ATDNo ratings yet
- ManualeDelphi IngleseDocument86 pagesManualeDelphi IngleseoxooxooxoNo ratings yet
- Board of Technical Education (Student Marksheet)Document2 pagesBoard of Technical Education (Student Marksheet)Manoj SainiNo ratings yet
- Current ElectricityDocument93 pagesCurrent ElectricitySurya SNo ratings yet