Download as pdf or txt
You might also like
- 5 - Production Planning problems-LPP ModelsDocument7 pages5 - Production Planning problems-LPP ModelsVishvajit KumbharNo ratings yet
- System Engineering ECE 451: Professor Dr. Hanan Ahmed KamalDocument38 pagesSystem Engineering ECE 451: Professor Dr. Hanan Ahmed KamalNoha IbrahimNo ratings yet
- ECE451 Lec#3Document38 pagesECE451 Lec#3Ali MohamedNo ratings yet
- Block Diagram Reduction Rules PDFDocument18 pagesBlock Diagram Reduction Rules PDFsvijiNo ratings yet
- Reduction of Complicated Block DiagramsDocument45 pagesReduction of Complicated Block Diagramstilahun modammedNo ratings yet
- Block Diagram: Dr. Issam ELGMATIDocument32 pagesBlock Diagram: Dr. Issam ELGMATI7moud alajlaniNo ratings yet
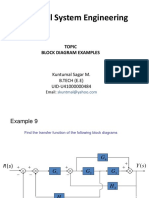
- Control System Engineering: Topic Block Diagram ExamplesDocument42 pagesControl System Engineering: Topic Block Diagram ExamplesjpatrNo ratings yet
- Regulation and Control Engineering: 2.4.1. Block Diagram Reduction TechniquesDocument24 pagesRegulation and Control Engineering: 2.4.1. Block Diagram Reduction Techniquestilahun modammedNo ratings yet
- Block Diagram Reduction Techniques: Control System EngineeringDocument24 pagesBlock Diagram Reduction Techniques: Control System EngineeringShreya TripathiNo ratings yet
- 351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram ReductionDocument70 pages351 - 27435 - EE417 - 2019 - 1 - 1 - 1 - 0 3 Lec3 EE418 Block Diagram Reductionmishal shakeelNo ratings yet
- Chapter3 - Block Diagram - Reduction - 01-1Document27 pagesChapter3 - Block Diagram - Reduction - 01-1bayu laksanaNo ratings yet
- Examplesofblockdiagram 150415045655 Conversion Gate01Document42 pagesExamplesofblockdiagram 150415045655 Conversion Gate01Mostafa Abdelalim0% (1)
- Control Principles: Tutorial #3 Block DiagramDocument27 pagesControl Principles: Tutorial #3 Block DiagramReagan TorbiNo ratings yet
- Control Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & InstrumentationDocument27 pagesControl Principles Block Diagram Reduction: Chemical Engg 7 Semester Process Control & Instrumentationzahid ullahNo ratings yet
- Control System Engineering: Topic Block Diagram RepresentationDocument24 pagesControl System Engineering: Topic Block Diagram RepresentationWaqas AfzalNo ratings yet
- CH 3 2Document27 pagesCH 3 2Magarsaa Qana'iiNo ratings yet
- Control I - Part 5Document18 pagesControl I - Part 5Abo dahabNo ratings yet
- M8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Document45 pagesM8 - Ch-5 - Reduction of Multiple Subsystems-Part-1 (D)Shuvro Sankar SenNo ratings yet
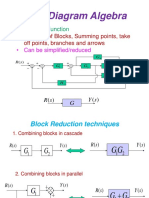
- Block Diagram AlgebraDocument27 pagesBlock Diagram Algebraearnest normanNo ratings yet
- Block Diagram AlgebraDocument28 pagesBlock Diagram AlgebraSirshenduNo ratings yet
- Block Diagram ReductionDocument26 pagesBlock Diagram Reductionmamnd tahaNo ratings yet
- Control Chapter 2 - Lecture 2Document28 pagesControl Chapter 2 - Lecture 23re0oooNo ratings yet
- Block Diagram Reduction: Submitted By: Mrs. Ramandeep Kaur Assot. Professor-EeeDocument26 pagesBlock Diagram Reduction: Submitted By: Mrs. Ramandeep Kaur Assot. Professor-EeeSeverina MallariNo ratings yet
- Lecture 5 Problems On Block Diagram ReductionDocument19 pagesLecture 5 Problems On Block Diagram ReductionTusharNo ratings yet
- Tutorial 3Document2 pagesTutorial 3sanjaysr2226No ratings yet
- Block Diagram Algebra UploadedDocument21 pagesBlock Diagram Algebra Uploadedshubhamgautam56_6497No ratings yet
- Solution A3 NPTEL Control Engg Jan April 2020Document12 pagesSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- BLK and SFG PDFDocument48 pagesBLK and SFG PDFyeabsira gashawNo ratings yet
- Control Principles: Unit IDocument30 pagesControl Principles: Unit ISam potterNo ratings yet
- Lecture 2 Block Diagram Representation of Control SystemsDocument57 pagesLecture 2 Block Diagram Representation of Control SystemsAmeer FauwazNo ratings yet
- Concept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyDocument23 pagesConcept of Block Diagram & Rules of Block Diagram Reduction: G H Patel College of Engineering & TechnologyHiral HiraniNo ratings yet
- Block Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Document11 pagesBlock Diagram and SFG - Practice Sheet 01 (By Diptanshu Sir)Dewashish KarmiyalNo ratings yet
- Control Systems - DIV B - Tutorial 1Document3 pagesControl Systems - DIV B - Tutorial 1Avadh VadhiyaNo ratings yet
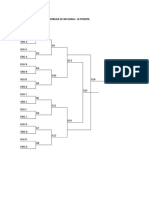
- Jadual Kalah Mati Dam AjiDocument9 pagesJadual Kalah Mati Dam AjisaqifahrazakNo ratings yet
- Block Diagram ReductionDocument3 pagesBlock Diagram ReductionAbhilash MohanNo ratings yet
- S S S S F F F: Tutorial Chapter 2Document2 pagesS S S S F F F: Tutorial Chapter 2Amirul HarisNo ratings yet
- Block Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6Document5 pagesBlock Diagram Reduction:: Dr. Qasim Abbas Automatic Control I 6علي حسين علاوي ثوينيNo ratings yet
- SA2019-20 CHAPTER 1 Block DiagramDocument23 pagesSA2019-20 CHAPTER 1 Block DiagramMohamad Firdaus Ismal Hafis bin Mohd MokhtarNo ratings yet
- Block Diagram and SFG - Practice Sheet 01Document11 pagesBlock Diagram and SFG - Practice Sheet 01adityaliugongNo ratings yet
- Control Systems - Block Diagram ReductionDocument6 pagesControl Systems - Block Diagram ReductionsatishkumarNo ratings yet
- Determine Transfer Function For The Block Diagrams Below Using Block Diagram Reduction Techniques and Signal Flow GraphsDocument2 pagesDetermine Transfer Function For The Block Diagrams Below Using Block Diagram Reduction Techniques and Signal Flow GraphsPrince WyneNo ratings yet
- Block Diagram Reduction TechniquesDocument27 pagesBlock Diagram Reduction TechniquessreenathreddyNo ratings yet
- Double Elimination 8 TEAMSDocument1 pageDouble Elimination 8 TEAMSedwinseranajr24No ratings yet
- Block Diagram Reduction TechniqueDocument5 pagesBlock Diagram Reduction Techniqueproje22ctNo ratings yet
- Digital Logic Design: Abdulhadi ShoufanDocument12 pagesDigital Logic Design: Abdulhadi ShoufanMohammed ismail2010No ratings yet
- Lec04: Objectives: Unit 2 Control SystemDocument6 pagesLec04: Objectives: Unit 2 Control SystemJosena SSNo ratings yet
- Control5 2020 Block Diagram ManipulationDocument20 pagesControl5 2020 Block Diagram ManipulationKhong JunYonGNo ratings yet
- ch04 Sol 10thDocument37 pagesch04 Sol 10th김서진No ratings yet
- Lec 04Document12 pagesLec 04Adit 0110No ratings yet
- Q.1 Find Circuit Matrix Using Nodal Analysis For The Circuit Given BelowDocument21 pagesQ.1 Find Circuit Matrix Using Nodal Analysis For The Circuit Given BelowRakesh BhardwajNo ratings yet
- CHEE319 Tutorial 4 SolnDocument13 pagesCHEE319 Tutorial 4 SolnyeshiduNo ratings yet
- AssigmentDocument4 pagesAssigmentYonatan GizawNo ratings yet
- Cen438 HW 1Document1 pageCen438 HW 1Esra ÜretenNo ratings yet
- Tutorial 2Document4 pagesTutorial 2sanjaysr2226No ratings yet
- FeedbackDocument39 pagesFeedbackhazem ab2009No ratings yet
- Assignment Model System RepresentationDocument3 pagesAssignment Model System RepresentationFadhli HashimNo ratings yet
- Gravity Dams Fluids 1 PDFDocument27 pagesGravity Dams Fluids 1 PDFChristian DayritNo ratings yet
- Maps - The Empty ThroneDocument6 pagesMaps - The Empty ThroneDaniel EricssonNo ratings yet
- سيطرة 3Document17 pagesسيطرة 3yasa1990No ratings yet
- Traffic_Control_SystemDocument8 pagesTraffic_Control_Systemyasa1990No ratings yet
- Lecture 3Document10 pagesLecture 3yasa1990No ratings yet
- Automatic Control System Lecture 1Document9 pagesAutomatic Control System Lecture 1yasa1990No ratings yet
- VariationalDocument9 pagesVariationalNguyễn Châu Phương ThiNo ratings yet
- Nonlinear Control and Servo SystemsDocument74 pagesNonlinear Control and Servo SystemsshivnairNo ratings yet
- Pinto 10Document15 pagesPinto 10jahanzebNo ratings yet
- Bike Sharing Company AnalysisDocument14 pagesBike Sharing Company AnalysisY ANISH REDDYNo ratings yet
- Peng, Bo y Otros A Meta-Analysis of International Tourism Demand Forecasting andDocument13 pagesPeng, Bo y Otros A Meta-Analysis of International Tourism Demand Forecasting andEdith López CiucciNo ratings yet
- Greater Noida Institute of Technology Greater Noida: Python LabDocument8 pagesGreater Noida Institute of Technology Greater Noida: Python LabMusical KhurshidNo ratings yet
- Survey On Facial Emotion Recognition Using Deep LearningDocument6 pagesSurvey On Facial Emotion Recognition Using Deep LearningIJRASETPublicationsNo ratings yet
- Opencv-Face Detection Using Haar CascadesDocument4 pagesOpencv-Face Detection Using Haar CascadesgeniusbijonNo ratings yet
- Serial Concatenation of Interleaved Codes: Performance Analysis, Design, and Iterative DecodingDocument26 pagesSerial Concatenation of Interleaved Codes: Performance Analysis, Design, and Iterative DecodingRavi Kanth VanapalliNo ratings yet
- Study of Neural Network PID Control in Variable Frequency Air-Conditioning SystemDocument6 pagesStudy of Neural Network PID Control in Variable Frequency Air-Conditioning Systemsolarflare_No ratings yet
- Solving Equations (X On Both Sides)Document6 pagesSolving Equations (X On Both Sides)rj0898637No ratings yet
- Theory of Automata Lecture#2: by Riaz Ahmad Ziar R.ziar@kardan - Edu.afDocument22 pagesTheory of Automata Lecture#2: by Riaz Ahmad Ziar R.ziar@kardan - Edu.afahmad khanNo ratings yet
- Searching AlgorithmsDocument17 pagesSearching Algorithmsabdnazar2003No ratings yet
- Syntax Analysis: The Role of ParserDocument3 pagesSyntax Analysis: The Role of ParserAreej EhsanNo ratings yet
- The International Data Encryption Algorithm (IDEA)Document4 pagesThe International Data Encryption Algorithm (IDEA)LoveNo ratings yet
- Algorithm AnalysisDocument66 pagesAlgorithm AnalysisAbdi NegassaNo ratings yet
- Arabic Origins of Cryptology Vol. 6Document199 pagesArabic Origins of Cryptology Vol. 6suwaiyel100% (2)
- Iterative Methods - Used For Large Numbers of Equations (N 2000)Document15 pagesIterative Methods - Used For Large Numbers of Equations (N 2000)sean_terryNo ratings yet
- Unit-5 DSADocument8 pagesUnit-5 DSASanjayNo ratings yet
- Tutorial Python 2Document29 pagesTutorial Python 2andreNo ratings yet
- Code ConvertorsDocument10 pagesCode ConvertorsNisha s RajNo ratings yet
- Eigen VectorDocument4 pagesEigen VectorkirtiNo ratings yet
- Mechanical Translational Systems QuestionsDocument6 pagesMechanical Translational Systems Questionsdjun033No ratings yet
- Implementation of Higher-Order IIR Filter Using 8051 MicrocontrollerDocument9 pagesImplementation of Higher-Order IIR Filter Using 8051 MicrocontrollerVi PowderNo ratings yet
- Math 135A Laurent Ucr 2010 Fall Numerical AnalysisDocument43 pagesMath 135A Laurent Ucr 2010 Fall Numerical Analysismath135a_ucrNo ratings yet
- Thermodynamics: AllenDocument9 pagesThermodynamics: AllenronakNo ratings yet
- Time SeriesDocument190 pagesTime SeriesTrịnh TâmNo ratings yet
- The FRM Part I: Formula Guide: Value and Risk ModelsDocument10 pagesThe FRM Part I: Formula Guide: Value and Risk ModelsJavneet KaurNo ratings yet
- Image Steganalysis Using Deep Learning 2023Document33 pagesImage Steganalysis Using Deep Learning 2023Ravinder KaurNo ratings yet