Download as pdf or txt
You might also like
- Chapter One 1.1Document33 pagesChapter One 1.1GODSWILL EMMANUELNo ratings yet
- How To Build A Custom Synthetic Data Pipeline To Train AI Perception Models - 1663599055391001rwKFDocument48 pagesHow To Build A Custom Synthetic Data Pipeline To Train AI Perception Models - 1663599055391001rwKFvirtuelNo ratings yet
- 3d Systems Wrap en Letter Web 2019-11-01Document4 pages3d Systems Wrap en Letter Web 2019-11-01Sam BaNo ratings yet
- Pro-Sivic: A Platform For Modeling and Simulation of Multi-Frequency Environments and Multi-Technology SensorsDocument6 pagesPro-Sivic: A Platform For Modeling and Simulation of Multi-Frequency Environments and Multi-Technology SensorsfirmjunkNo ratings yet
- Brochure Geomagic Wrap SoftwareDocument4 pagesBrochure Geomagic Wrap SoftwarebehipiluwuNo ratings yet
- Scan It, Mesh It, Surface It. in MinutesDocument4 pagesScan It, Mesh It, Surface It. in MinutesSam BaNo ratings yet
- EVReS For JKR Virtalis 1 March 2016Document58 pagesEVReS For JKR Virtalis 1 March 2016fuaadNo ratings yet
- Train Smarter With Synthetic Data and Domain AdaptationDocument2 pagesTrain Smarter With Synthetic Data and Domain AdaptationHarish MNo ratings yet
- SeisImager 2D Spec Sheet 060220Document2 pagesSeisImager 2D Spec Sheet 060220Anonymous iWaBM6P9V6No ratings yet
- Microseismic Technologies For Geothermal Applications: Monitoring Reservoir Development Using Passive SeismicsDocument14 pagesMicroseismic Technologies For Geothermal Applications: Monitoring Reservoir Development Using Passive SeismicsA Dwi WahyonoNo ratings yet
- UoN GRC TrackingDocument19 pagesUoN GRC Trackingmarcus_andreottiNo ratings yet
- WATER TANK Laser Scanning v2Document17 pagesWATER TANK Laser Scanning v2nz kumpulanNo ratings yet
- GeoFans Mud Logging Software IntroductionDocument20 pagesGeoFans Mud Logging Software IntroductiongqzxmNo ratings yet
- UAV / Drone Uses in The Petroleum Industry: Upstream FocusDocument25 pagesUAV / Drone Uses in The Petroleum Industry: Upstream FocusferryNo ratings yet
- Radars and Sensors MISTDocument2 pagesRadars and Sensors MISTdev aseNo ratings yet
- Iot & Industry 4.0: Strategies and Execution PerspectivesDocument30 pagesIot & Industry 4.0: Strategies and Execution PerspectivesNilson Alves de OliveiraNo ratings yet
- GIS Presentation 1Document7 pagesGIS Presentation 1Declan koechNo ratings yet
- The One-Stop Software For 3D Cameras, Digitizers & Coordinate Measurement MachinesDocument2 pagesThe One-Stop Software For 3D Cameras, Digitizers & Coordinate Measurement MachinesSam BaNo ratings yet
- CMS V500 PresentationDocument21 pagesCMS V500 PresentationmahyudinaseppNo ratings yet
- Graphics Pipeline and GraphsDocument12 pagesGraphics Pipeline and GraphsRohit TiwariNo ratings yet
- 1 s2.0 S2352340922006096 MainDocument9 pages1 s2.0 S2352340922006096 MainSimone FontanaNo ratings yet
- Nest User Manual 5.1Document398 pagesNest User Manual 5.1Nyeinchan MinNo ratings yet
- Presentation GeeDocument50 pagesPresentation GeeSadriyansahNo ratings yet
- Well CadDocument28 pagesWell CadSamiur Rahman KhanNo ratings yet
- Agisoft-PhotoScan Presentation PDFDocument12 pagesAgisoft-PhotoScan Presentation PDFAjie MilanDivernistiNo ratings yet
- Virtual Reality and Virtual EnvironmentsDocument43 pagesVirtual Reality and Virtual EnvironmentsvenkibossNo ratings yet
- 1 Introduction and Real-Time Task SchedulingDocument36 pages1 Introduction and Real-Time Task Scheduling4132lenin6497ramNo ratings yet
- Smartseis Se Underground Imaging SystemDocument2 pagesSmartseis Se Underground Imaging SystemGunawanNo ratings yet
- Augmented RealityDocument26 pagesAugmented RealityRONYROY222No ratings yet
- Abdullah Geospatial Data Qua PDFDocument163 pagesAbdullah Geospatial Data Qua PDFRicardo Saavedra CotrinaNo ratings yet
- GeomagicDocument10 pagesGeomagicJunior Panta BalderaNo ratings yet
- Modelling and Inversion Software For 3D Resistivity and Chargeability Ert DataDocument5 pagesModelling and Inversion Software For 3D Resistivity and Chargeability Ert DataBouramaNo ratings yet
- CORL18_RebecqDocument14 pagesCORL18_Rebecqhazard0No ratings yet
- Lecture1 - Vision For RoboticsDocument51 pagesLecture1 - Vision For RoboticsChailenderNo ratings yet
- NewSirovision Brochure 220726 EN FINALDocument4 pagesNewSirovision Brochure 220726 EN FINALmining engineerNo ratings yet
- Depth Sensing TechnologiesDocument4 pagesDepth Sensing TechnologiesRahul KaruvingalNo ratings yet
- GettingstartedDocument47 pagesGettingstartedtituandreescu6810No ratings yet
- Quality 4.0 AI Based Computer Vision Brings Actionable Insights To Manufacturing PDFDocument32 pagesQuality 4.0 AI Based Computer Vision Brings Actionable Insights To Manufacturing PDFCynthia TorresNo ratings yet
- Developing Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingDocument28 pagesDeveloping Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingZul Zulhilmi100% (1)
- 7, 8 and 9Document15 pages7, 8 and 9KeertanaNo ratings yet
- Studio: Complete Software For Full 3D ERT Data ManagementDocument5 pagesStudio: Complete Software For Full 3D ERT Data Managementbumi loserNo ratings yet
- Gee RusleDocument22 pagesGee Ruslerkjaiswal.nihNo ratings yet
- Point Cloud Processing Software: Geotechnical Analysis Using Modern 3D Imaging TechnologiesDocument2 pagesPoint Cloud Processing Software: Geotechnical Analysis Using Modern 3D Imaging TechnologiesGiuseppe EspositoNo ratings yet
- 3-D Scanner: B.Tech-Mechatronics (5 SemesterDocument17 pages3-D Scanner: B.Tech-Mechatronics (5 Semestershekhar yadavNo ratings yet
- Augmented Reality: David JohnsonDocument26 pagesAugmented Reality: David JohnsonPranay Rawat100% (1)
- Introduction To Gis WorkbookDocument47 pagesIntroduction To Gis WorkbookAbbas AbduNo ratings yet
- Smart Camera As Embedded Systems: Albin Thomas S7 Cse NO2Document25 pagesSmart Camera As Embedded Systems: Albin Thomas S7 Cse NO2liyamolNo ratings yet
- SnapDocument26 pagesSnapRogerRomarioMamaniCalamulloNo ratings yet
- Pix4dmapper enDocument3 pagesPix4dmapper enDavid Alexander RojasNo ratings yet
- Standard System Physical CharacteristicsDocument2 pagesStandard System Physical CharacteristicsSupriyo PNo ratings yet
- DS MBPDocument1 pageDS MBPJuan GuerraNo ratings yet
- Embedded Systems - CS 2364Document97 pagesEmbedded Systems - CS 2364S_Gunasekar100% (1)
- Advanced Topics in Autonomous Driving Using Deep Learning: Presenter: Nasim SoulyDocument41 pagesAdvanced Topics in Autonomous Driving Using Deep Learning: Presenter: Nasim SoulyJJ KumNo ratings yet
- Design Lab BrochureDocument6 pagesDesign Lab BrochureRahul NavghareNo ratings yet
- Capture: Integrated, Industrial-Grade 3D Scanner and Software SystemsDocument4 pagesCapture: Integrated, Industrial-Grade 3D Scanner and Software SystemsoliviaNo ratings yet
- Internet of Things (Iot) : Instructor: Fahad MajeedDocument47 pagesInternet of Things (Iot) : Instructor: Fahad MajeedRobina Noor BhattiNo ratings yet
- ContextCapture PDSDocument6 pagesContextCapture PDSNadya RosalindaNo ratings yet
- Zebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingDocument16 pagesZebedee: Design of A Spring-Mounted 3-D Range Sensor With Application To Mobile MappingAndrej BašićNo ratings yet
- Design Optimization Using The Latest Features in Helioscope: October 2016Document21 pagesDesign Optimization Using The Latest Features in Helioscope: October 2016dutrafaissalNo ratings yet
- ICN AVoiceToLead Guidancepack-9Document60 pagesICN AVoiceToLead Guidancepack-9Muh. AkbarNo ratings yet
- Classical and Operant ConditioningDocument14 pagesClassical and Operant ConditioningrajnaNo ratings yet
- Hypersonic Sound System-2525Document2 pagesHypersonic Sound System-2525Harish RithishNo ratings yet
- Jabem Bible Papua New GuineaDocument1,848 pagesJabem Bible Papua New GuineaAsia BiblesNo ratings yet
- Salleh2021 Article TheEmergenceOfVeryLargeContainDocument21 pagesSalleh2021 Article TheEmergenceOfVeryLargeContainSajid KhanNo ratings yet
- Cttplus HandbookDocument36 pagesCttplus HandbookgcarreongNo ratings yet
- UntitledDocument27 pagesUntitledFlavio MagelaNo ratings yet
- Discussion and ConclusionDocument16 pagesDiscussion and Conclusionzul hilmiNo ratings yet
- UTAMU Procurement and Disposal of Assets Policy 2017Document46 pagesUTAMU Procurement and Disposal of Assets Policy 2017Abdulai WakoNo ratings yet
- Civil AutoCAD - CVDocument3 pagesCivil AutoCAD - CVNaseef PnNo ratings yet
- Reading & Listening Extra: Intermediate Plus Unit 2Document2 pagesReading & Listening Extra: Intermediate Plus Unit 2Coco Languages100% (1)
- 8 y 9 Sem MATERIAL de ESTUDIO INGLES V Unit V Do You Know Where It Is Unit VI Since WhenDocument12 pages8 y 9 Sem MATERIAL de ESTUDIO INGLES V Unit V Do You Know Where It Is Unit VI Since WhenJoseph MartinezNo ratings yet
- Practice Test CDocument64 pagesPractice Test CAneri100% (1)
- TIP Course 1 DepEd TeacherDocument124 pagesTIP Course 1 DepEd TeacherCharlyn GanzonNo ratings yet
- Acoustic PhoneticsDocument19 pagesAcoustic PhoneticsRihane El Alaoui100% (1)
- Binary Number SystemDocument18 pagesBinary Number SystemParm KarmNo ratings yet
- mô tả chungDocument34 pagesmô tả chungTuấn Anh NguyễnNo ratings yet
- Measurement-Based CSFB Target Selection PDFDocument18 pagesMeasurement-Based CSFB Target Selection PDFsepidehNo ratings yet
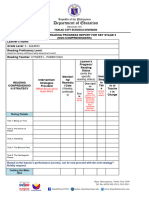
- Ks2 NC Reading Progress ReportDocument5 pagesKs2 NC Reading Progress ReportCyndee PamintuanNo ratings yet
- Hot Pumps & Thermal ExpansionDocument3 pagesHot Pumps & Thermal ExpansionMahmoud Al Homran100% (1)
- Unit 1. Common StructuresDocument21 pagesUnit 1. Common Structuresmaimai003bnNo ratings yet
- CAAP Telephone Public Directory PDFDocument4 pagesCAAP Telephone Public Directory PDFMaria Angelica Rodriguez AlonsoNo ratings yet
- Basic COMPETENCIES Module of InstructionDocument18 pagesBasic COMPETENCIES Module of InstructionMarveen TingkahanNo ratings yet
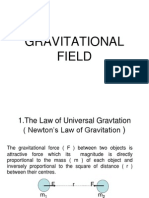
- Gravitational FieldDocument12 pagesGravitational FieldAmaliani Candra PradiptaNo ratings yet
- Writing Visual Basic ProjectsDocument1 pageWriting Visual Basic ProjectsAmmuKuttyNo ratings yet
- Bangalore University: "Student Attendance Management"Document10 pagesBangalore University: "Student Attendance Management"Rohit VilliersNo ratings yet
- Projectile Motion EtoosDocument24 pagesProjectile Motion EtoosT sidharth100% (1)
- Role of Critical Care NursingDocument8 pagesRole of Critical Care NursingHari Mas KuncoroNo ratings yet
- 02 Kinematics Tutorial Solutions 2017Document12 pages02 Kinematics Tutorial Solutions 2017Victoria YongNo ratings yet