Download as pdf or txt
You might also like
- Micro Economics IA PDFDocument4 pagesMicro Economics IA PDFLuqman HakimNo ratings yet
- DD Comp19 Modular Full-Bridge Converter For Three-Phase Switched Reluctance Motors With Integrated Fault-Tolerance CapabilityDocument13 pagesDD Comp19 Modular Full-Bridge Converter For Three-Phase Switched Reluctance Motors With Integrated Fault-Tolerance CapabilityAhmet Can YULAFNo ratings yet
- Fan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEDocument13 pagesFan Yi, Student Member, IEEE, and Wen Cai, Student Member, IEEEMarcelo Vinicius de PaulaNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- Single Switch DC-DC Converter For Battery Feed Electrical VehicleDocument19 pagesSingle Switch DC-DC Converter For Battery Feed Electrical VehicleResearch ParkNo ratings yet
- Title of The Project: Pragati Engineering College (Autonomous)Document13 pagesTitle of The Project: Pragati Engineering College (Autonomous)Lucky AbhiNo ratings yet
- Tri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesDocument8 pagesTri-Port Converter For Flexible Energy Control of PV-fed Electric VehiclesSureshNo ratings yet
- Investigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric VehiclesDocument10 pagesInvestigation of Integrated Charging and Discharging Incorporating Interior Permanent Magnet Machine With Damper Bars For Electric Vehiclespathfinder tamlukNo ratings yet
- D678773289D0C345D5101CE278B0DE59Document13 pagesD678773289D0C345D5101CE278B0DE59Sung Ryoung LimNo ratings yet
- Hegazy 2011Document7 pagesHegazy 2011Harshal VaidyaNo ratings yet
- Electric Bikes Energy Management Game Theoretic Synthesis and ImplementationDocument6 pagesElectric Bikes Energy Management Game Theoretic Synthesis and ImplementationAves de Herveo - TolimaNo ratings yet
- Performance - Comparison EV ApplnDocument15 pagesPerformance - Comparison EV Applnmanoish07No ratings yet
- E3sconf SeFet2019 01029Document6 pagesE3sconf SeFet2019 01029DONE AND DUSTEDNo ratings yet
- Final PPT of ProjectDocument11 pagesFinal PPT of ProjectLucky AbhiNo ratings yet
- The Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsDocument6 pagesThe Usage of Supercapacitors For Energy Storage Systems in The DC-Link of Machine ToolsEdu Daryl MacerenNo ratings yet
- Motores de Imánes Permanentes y de InductanciaDocument5 pagesMotores de Imánes Permanentes y de InductanciaFreddy Julián Chipugsi CaleroNo ratings yet
- Journal Jpe 15-5 1658292190Document12 pagesJournal Jpe 15-5 1658292190Nuri KaraoğlanNo ratings yet
- Position-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesDocument13 pagesPosition-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesMalikAlrahabiNo ratings yet
- Chapter 5Document7 pagesChapter 5surendraNo ratings yet
- High Efficiency LLC Resonant Converter With Wide Output Range of 200-1000 V For DC-Connected EVs Ultra-Fast Charging StationsDocument12 pagesHigh Efficiency LLC Resonant Converter With Wide Output Range of 200-1000 V For DC-Connected EVs Ultra-Fast Charging StationsAYUSH GOYALNo ratings yet
- Design of Buck Boost Converter - Final ThesisDocument53 pagesDesign of Buck Boost Converter - Final ThesisVikrant VishalNo ratings yet
- BidireDocument11 pagesBidiretadivadavamsiNo ratings yet
- Energy Management of PEM Fuel Cell/ Supercapacitor Hybrid Power Sources For An Electric VehicleDocument9 pagesEnergy Management of PEM Fuel Cell/ Supercapacitor Hybrid Power Sources For An Electric VehicleSidahmed LarbaouiNo ratings yet
- 1 ADocument12 pages1 Asharjeel hassanNo ratings yet
- Development of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentDocument7 pagesDevelopment of Electric Vehicle Powertrain: Experimental Implementation and Performance AssessmentBaldau Pratap Singh BundelaNo ratings yet
- Solar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleDocument8 pagesSolar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleNandhakumar NANDYNo ratings yet
- DC To DC For Solar Powered Electric Vehicle PlagiarismDocument10 pagesDC To DC For Solar Powered Electric Vehicle PlagiarismNandhakumar NANDYNo ratings yet
- Designing An On-Board Charger To Efficiently Charge Multiple Electric VehiclesDocument19 pagesDesigning An On-Board Charger To Efficiently Charge Multiple Electric VehiclesBALASUNDAR CNo ratings yet
- Energies: Energy-Regenerative Braking Control of Electric Vehicles Using Three-Phase Brushless Direct-Current MotorsDocument16 pagesEnergies: Energy-Regenerative Braking Control of Electric Vehicles Using Three-Phase Brushless Direct-Current MotorsAnonymous KhhapQJVYtNo ratings yet
- guoDocument15 pagesguoImane Ait AyadNo ratings yet
- Power Converter Circuits For Recuperation of The Regenerative Braking Energy in Rail VehiclesDocument6 pagesPower Converter Circuits For Recuperation of The Regenerative Braking Energy in Rail VehiclesSilvestarNo ratings yet
- Design of Buck Boost Converter Final Thesis PDFDocument53 pagesDesign of Buck Boost Converter Final Thesis PDFSusiNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument11 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationAra AkramNo ratings yet
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocument13 pagesAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNo ratings yet
- 1 s2.0 S2405844023060164 MainDocument35 pages1 s2.0 S2405844023060164 MainFAUSTO JAVIER ZAPA PEREZNo ratings yet
- Development of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IDocument4 pagesDevelopment of Small Battery Powered Three Wheeler Using PM Hub Motor Prototype IKapish SharmaNo ratings yet
- An Integrated Modular Converter For Switched Reluctance Motor Drives in Range-Extended Electric VehiclesDocument7 pagesAn Integrated Modular Converter For Switched Reluctance Motor Drives in Range-Extended Electric VehiclesSung Ryoung LimNo ratings yet
- Grid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesDocument12 pagesGrid and Solar Photovoltaic Sources Assisted Charging System For Electric VehiclesIJRASETPublicationsNo ratings yet
- Energy Saving SRPDocument13 pagesEnergy Saving SRPJose ContrerasNo ratings yet
- Eull2021 - Non Isolated Smart Fast Charger Integrated in The Traction Drivetrain of Electrified VehiclesDocument17 pagesEull2021 - Non Isolated Smart Fast Charger Integrated in The Traction Drivetrain of Electrified VehiclesAmanuel Amare GebrekidanNo ratings yet
- Braking RegenerationDocument19 pagesBraking RegenerationChouaib MokraneNo ratings yet
- Performance Analysis of a High Gain Bidirectional DC-DC Converter Fed Drive for an Electric Vehicle With Battery Charging Capability During BrakingDocument13 pagesPerformance Analysis of a High Gain Bidirectional DC-DC Converter Fed Drive for an Electric Vehicle With Battery Charging Capability During BrakingBinit ShresthaNo ratings yet
- Advanced H-Bridge Controlled Transformer-Less Buck-Boost DC-DC Converter For Fast Charging in Electric VehiclesDocument4 pagesAdvanced H-Bridge Controlled Transformer-Less Buck-Boost DC-DC Converter For Fast Charging in Electric VehiclesRamsathayaNo ratings yet
- Dynamic Control of Traction Motor For EV Fed Via DDocument18 pagesDynamic Control of Traction Motor For EV Fed Via Dtengfei.sunNo ratings yet
- 53e9aeabb7602d97038d1360 0Document13 pages53e9aeabb7602d97038d1360 0Sung Ryoung LimNo ratings yet
- 12th Evaluation Ahmed Samy 17105552Document14 pages12th Evaluation Ahmed Samy 17105552Ahmed Samy El GoharyNo ratings yet
- Electric Vehicle Thesis PDFDocument4 pagesElectric Vehicle Thesis PDFWriteMyPaperForMeUK100% (4)
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 pagesOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNo ratings yet
- A Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationDocument14 pagesA Novel Step-Up Multi-Input DC-DC Converter For Hybrid Electric Vehicles ApplicationKumavat AmarNo ratings yet
- Helpful Hints To Enhance Reliability of DC-DC Converters in Hybrid Electric Vehicle ApplicationsDocument6 pagesHelpful Hints To Enhance Reliability of DC-DC Converters in Hybrid Electric Vehicle ApplicationsJyothiPunemNo ratings yet
- A Review On Multiphase Drives For Automotive Traction ApplicationsDocument20 pagesA Review On Multiphase Drives For Automotive Traction Applicationshamza mesaiNo ratings yet
- Elevator Based BLDCDocument9 pagesElevator Based BLDCsathishNo ratings yet
- A209 PDFDocument8 pagesA209 PDFCuriosityShopNo ratings yet
- Electric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueDocument8 pagesElectric Vehicle Speed Control Using Three Phase Inverter Operated by DSP-based Space Vector Pulse Width Modulation TechniqueCuriosityShopNo ratings yet
- Evaluation of Regenerative Braking and Its Functionality in Electric VehiclesDocument6 pagesEvaluation of Regenerative Braking and Its Functionality in Electric VehiclesDEBARATI DAMNo ratings yet
- Multiphase Bidirectional Flyback Converter PDFDocument7 pagesMultiphase Bidirectional Flyback Converter PDFArceu CamposNo ratings yet
- Grid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsDocument4 pagesGrid-Connected PV-Wind-Battery Based Multi-Input Transformer Coupled Bidirectional DC-DC Converter For Household ApplicationsIJRASETPublicationsNo ratings yet
- Optimization of Switched Reluctance Motors For Hybrid Electric VehiclesDocument6 pagesOptimization of Switched Reluctance Motors For Hybrid Electric VehiclesgeerhardusvosNo ratings yet
- Design and Assessment of Elrctic Vehicle PowertrainDocument10 pagesDesign and Assessment of Elrctic Vehicle Powertrainhcsjai1995No ratings yet
- Three-Phase AC-DC Converter For Direct-Drive PMSG-based Wind Energy Conversion SystemDocument10 pagesThree-Phase AC-DC Converter For Direct-Drive PMSG-based Wind Energy Conversion SystemManoj BadoniNo ratings yet
- Wound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterDocument11 pagesWound Rotor Machine With Single-Phase Stator and Three-Phase Rotor Windings Controlled by Isolated Three-Phase InverterBook4AllNo ratings yet
- Comparison of Converter Control Strategies for a Switched Reluctance MachineDocument5 pagesComparison of Converter Control Strategies for a Switched Reluctance MachinejuhiparikhNo ratings yet
- pmbldc (1)Document52 pagespmbldc (1)juhiparikhNo ratings yet
- An auto-calibrating model for an 8-6 switched reluctance motor drive application to design and controlDocument7 pagesAn auto-calibrating model for an 8-6 switched reluctance motor drive application to design and controljuhiparikhNo ratings yet
- Design and development of Switched Reluctance Motor for electric vehicle applicationDocument6 pagesDesign and development of Switched Reluctance Motor for electric vehicle applicationjuhiparikhNo ratings yet
- Battery powered 4-phase 8-6 pole SRM drive for advanced electric vehicleDocument5 pagesBattery powered 4-phase 8-6 pole SRM drive for advanced electric vehiclejuhiparikhNo ratings yet
- A Multi-Objective Particle Swarm Optimization based Current Control and Torque Control for 8-6 Switched Reluctance MotorDocument6 pagesA Multi-Objective Particle Swarm Optimization based Current Control and Torque Control for 8-6 Switched Reluctance MotorjuhiparikhNo ratings yet
- A novel switched reluctance motor drive systemDocument4 pagesA novel switched reluctance motor drive systemjuhiparikhNo ratings yet
- Speed Control of Fault-Tolerant Switched Reluctance Motor Drive with Current and Voltage PWM Control TechniquesDocument5 pagesSpeed Control of Fault-Tolerant Switched Reluctance Motor Drive with Current and Voltage PWM Control TechniquesjuhiparikhNo ratings yet
- A Novel 4-level Converter with Inherent Voltage Boosting for 4-Phase SRMDocument6 pagesA Novel 4-level Converter with Inherent Voltage Boosting for 4-Phase SRMjuhiparikhNo ratings yet
- Betting On BatteriesDocument11 pagesBetting On BatteriesBrian HNo ratings yet
- 620LDocument4 pages620LKayla ButzNo ratings yet
- EDB-Record Notes of The Meeting Held On 29 May On EV PolicyDocument5 pagesEDB-Record Notes of The Meeting Held On 29 May On EV PolicysadullahNo ratings yet
- Scolaro Elia 1197578Document112 pagesScolaro Elia 1197578Nico QuattrominiNo ratings yet
- Converging Technologies For Electric Hybrid Vehicles and More Electric Aircraft SystemsDocument12 pagesConverging Technologies For Electric Hybrid Vehicles and More Electric Aircraft SystemsO GoogleNo ratings yet
- Report On Potential Market of E-VehiclesDocument42 pagesReport On Potential Market of E-Vehiclesjayantraghav100% (3)
- Smart Task Submission Format (Electric Vehicle)Document4 pagesSmart Task Submission Format (Electric Vehicle)Harshil AnandNo ratings yet
- Industries in 2019: A Special Report From The Economist Intelligence UnitDocument48 pagesIndustries in 2019: A Special Report From The Economist Intelligence Unithaytham65No ratings yet
- Automotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationDocument55 pagesAutomotive Battery Management System (BMS) Using State-of-Charge (SOC) EstimationUchenna Adimmadu100% (1)
- Bosch India Corporate Presentation 2017 July Updated v2-1 PDFDocument47 pagesBosch India Corporate Presentation 2017 July Updated v2-1 PDFprernaNo ratings yet
- Tritium RT50 DC Fast Charger BrochureDocument5 pagesTritium RT50 DC Fast Charger BrochureCarlos AndradeNo ratings yet
- OAT1903 Syllabus Elements of EHVDocument2 pagesOAT1903 Syllabus Elements of EHVSURESH KUMAR APNo ratings yet
- Mesma 48V 2020Document7 pagesMesma 48V 2020Sushil LamsalNo ratings yet
- Electric VehicleDocument29 pagesElectric VehicleManasa Nistala100% (2)
- Electric Vehicle Guidebook DIYguruDocument50 pagesElectric Vehicle Guidebook DIYguruSanket DevleNo ratings yet
- Development and Evaluation of A Hydrogen Fuel PoweDocument63 pagesDevelopment and Evaluation of A Hydrogen Fuel Powerezsam136364No ratings yet
- CarGurus US 2021 EV SurveyDocument28 pagesCarGurus US 2021 EV SurveySimon Alvarez100% (1)
- Electric Vehicle PDFDocument1 pageElectric Vehicle PDFTanushi DhawanNo ratings yet
- Study On Risk Managment in Stock Exchange Market For Automobile IndustryDocument83 pagesStudy On Risk Managment in Stock Exchange Market For Automobile IndustrykajalNo ratings yet
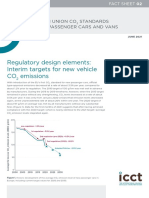
- European Union CO2 Standards For New Passenger Cars and Vans: Interim Targets For New Vehicle CO2 EmissionsDocument3 pagesEuropean Union CO2 Standards For New Passenger Cars and Vans: Interim Targets For New Vehicle CO2 EmissionsThe International Council on Clean TransportationNo ratings yet
- Electronics 11 01355Document26 pagesElectronics 11 01355MANIKANDAN P (PA2011005010037)No ratings yet
- Inverter ProposalDocument4 pagesInverter ProposalAung MyatNo ratings yet
- EV Final ReportDocument76 pagesEV Final ReportrahulNo ratings yet
- Evolet Dealers InsightDocument27 pagesEvolet Dealers InsightSuman KumarNo ratings yet
- Monthly Update: ELE Ctric BUS ELE Ctric CARDocument53 pagesMonthly Update: ELE Ctric BUS ELE Ctric CARapoorvsharanNo ratings yet
- Arcadia Customer Centric EV ReportDocument15 pagesArcadia Customer Centric EV ReportsheilumaNo ratings yet
- Sciencedirect Sciencedirect SciencedirectDocument13 pagesSciencedirect Sciencedirect SciencedirectAnonymous jOfpZ2j7No ratings yet
- SouthKorea Missionbooklet 2Document71 pagesSouthKorea Missionbooklet 2emekaNo ratings yet
- Tariff For 2-3 Wheelers ProposedDocument4 pagesTariff For 2-3 Wheelers ProposedsadullahNo ratings yet