Download as pdf or txt
You might also like
- Controls Systems ExamplesDocument67 pagesControls Systems ExamplesUpender Rao SunkishalaNo ratings yet
- Advanced Communication Lab (15ECL76)Document15 pagesAdvanced Communication Lab (15ECL76)kimberly100% (1)
- Simulated Output FullDocument33 pagesSimulated Output FullrbkNo ratings yet
- %PN Sequence Generation %Auto-Correlation Property of PN Sequence %generating Mapped PN SequenceDocument6 pages%PN Sequence Generation %Auto-Correlation Property of PN Sequence %generating Mapped PN SequenceSatya Swaroop PattanaikNo ratings yet
- Final CSDocument28 pagesFinal CSkvbrothers2004No ratings yet
- Assignment FormatDocument53 pagesAssignment FormatJuthik BVNo ratings yet
- Dcom Exp1: 1.NRZ CodeDocument3 pagesDcom Exp1: 1.NRZ CodeharshadasawantNo ratings yet
- TP 0102Document5 pagesTP 0102hopefullNo ratings yet
- Digital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580Document19 pagesDigital Communication Systems Lab Software: Meghna Rattanpal 17BEC0580natasha SharmaNo ratings yet
- CS - Exp8 2021200115Document5 pagesCS - Exp8 2021200115sridhar sundarNo ratings yet
- % Bsformula.mDocument30 pages% Bsformula.mapi-616455436No ratings yet
- QPSK Digital Modulation Simulation Using MATLAB: Quadrature Phase Shift KeyingDocument6 pagesQPSK Digital Modulation Simulation Using MATLAB: Quadrature Phase Shift KeyingJaweria Jaffar AliNo ratings yet
- Lab Tasks 10Document2 pagesLab Tasks 10Afaq KhaliqNo ratings yet
- Wa0000.Document20 pagesWa0000.22L229 - KRISHNA PRIYA R VNo ratings yet
- Signal Operations-Continuous Time: For IfDocument5 pagesSignal Operations-Continuous Time: For IfAnonymous XV3SIjz8bNo ratings yet
- Excercise 1: %generation of Unit Impulse: %generation of Ramp SignalDocument3 pagesExcercise 1: %generation of Unit Impulse: %generation of Ramp Signalmsd91No ratings yet
- MATLAB Source CodesDocument6 pagesMATLAB Source CodesArief YazidNo ratings yet
- Domaci Pedja: For For If End End EndDocument10 pagesDomaci Pedja: For For If End End EndМарко БулатовићNo ratings yet
- Prob2 36Document5 pagesProb2 36Fahad MalikNo ratings yet
- PROB2 36aDocument5 pagesPROB2 36aSundas FaizNo ratings yet
- Practical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesDocument21 pagesPractical 1: # 2D Linear Convolution, Circular Convolution Between Two 2D MatricesJustin Sebastian100% (1)
- Submitted By:: Ravi Kumar ROLL NO. 2K13/EL/069Document42 pagesSubmitted By:: Ravi Kumar ROLL NO. 2K13/EL/069RaviKumarNo ratings yet
- Matlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Document16 pagesMatlab Code For Basic DSP Signals MATLAB PROGRAM TO DISPLAY THE PROPERTIES OF DISCRETE FOURIER TRANSFORM (DFT)Sabithkk2007No ratings yet
- King Ooo 11111Document10 pagesKing Ooo 11111Muhammad MaazNo ratings yet
- DSP Lab ManualDocument51 pagesDSP Lab ManualShahin4220No ratings yet
- I. The simulation of system: num= (分子之係數) den= (分母之係數) sys=tf (num,den)Document3 pagesI. The simulation of system: num= (分子之係數) den= (分母之係數) sys=tf (num,den)Apollo LinNo ratings yet
- ADVANCED DIGITAL SIGNAL PROCESSING Lab ManualDocument44 pagesADVANCED DIGITAL SIGNAL PROCESSING Lab Manualpravalika100% (1)
- UntitledDocument1 pageUntitledabdo abdoNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- % Plotting The Given Question With CoordinatesDocument10 pages% Plotting The Given Question With CoordinatesNishan GajurelNo ratings yet
- Lab Report - Exp 7 - 1913145Document12 pagesLab Report - Exp 7 - 1913145Sumon TenpassNo ratings yet
- cs-2 Lab CodesDocument9 pagescs-2 Lab CodesBharathNo ratings yet
- Tugas 1 Inversi: Risky Hakim Bayakmiko 03411540000010Document5 pagesTugas 1 Inversi: Risky Hakim Bayakmiko 03411540000010Anonymous 4vyardxNo ratings yet
- Practical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitleDocument20 pagesPractical: 1 Unit Impulse Response: Num (0 0 1) Den (1 0.2 1) Impulse (Num, Den) Grid TitlealwaysharshNo ratings yet
- MATLAB CodeDocument3 pagesMATLAB CodeSbtc LooserNo ratings yet
- Implement The Cross Correlation Receiver For QPSK ModulationDocument13 pagesImplement The Cross Correlation Receiver For QPSK ModulationThennarasu Ramachandran100% (1)
- RPRTDocument9 pagesRPRTAshish PaudelNo ratings yet
- Simulation Experiments-Com LabDocument14 pagesSimulation Experiments-Com LabSanjana M PNo ratings yet
- Sample ChE 26 CodesDocument8 pagesSample ChE 26 CodesRyanChristianSuplitoNo ratings yet
- DIP FileDocument16 pagesDIP Filevg3095No ratings yet
- % 1km/h Doi Sang M/sDocument18 pages% 1km/h Doi Sang M/sHuyNo ratings yet
- MUHAMMAD MAAZ (N.A.Coding)Document13 pagesMUHAMMAD MAAZ (N.A.Coding)Muhammad MaazNo ratings yet
- Iam760 hw1Document8 pagesIam760 hw1tsevineNo ratings yet
- Matematika Biologi Tugas Ke 3Document29 pagesMatematika Biologi Tugas Ke 3Maya MahatmaNo ratings yet
- CS 3 DocDocument1 pageCS 3 DocSumon TenpassNo ratings yet
- Digitalcom Lab Manual NewDocument26 pagesDigitalcom Lab Manual NewAkanksha DixitNo ratings yet
- 20011P0417 DSP Matlab AssignmentDocument12 pages20011P0417 DSP Matlab AssignmentNARENDRANo ratings yet
- Digital Signal Processing Lab: Practical RecordDocument30 pagesDigital Signal Processing Lab: Practical RecordAnveshGopalamNo ratings yet
- All 'Enter The Sequence': For For End EndDocument3 pagesAll 'Enter The Sequence': For For End EndZeeshan Byfuglien GrudzielanekNo ratings yet
- Quadrature Amplitude ModulationDocument6 pagesQuadrature Amplitude ModulationFatimah BatoolNo ratings yet
- Ass 2Document9 pagesAss 2Deepayan DasNo ratings yet
- CT 303 Digital Communications Lab 9: Heer Gohil 201901135Document25 pagesCT 303 Digital Communications Lab 9: Heer Gohil 201901135H GNo ratings yet
- Ritik Dubey - Ritik Dubey-1Document10 pagesRitik Dubey - Ritik Dubey-1Saurabh KumarNo ratings yet
- Ex 3Document6 pagesEx 3Maan SinghNo ratings yet
- LCS Lab 7Document9 pagesLCS Lab 7SaRosh RaeesNo ratings yet
- Assignment-1 & 2 (MST) : Submitted by - Name - Shailendra Yadav - (21DR0165)Document5 pagesAssignment-1 & 2 (MST) : Submitted by - Name - Shailendra Yadav - (21DR0165)Shailendra YadavNo ratings yet
- Bharathidasan Engineering College: Department of Electronics & Communication EngineeringDocument71 pagesBharathidasan Engineering College: Department of Electronics & Communication EngineeringnarasimhanNo ratings yet
- Transfer Function - MatlabDocument33 pagesTransfer Function - MatlabTam PhamNo ratings yet
- Matlab ExamDocument25 pagesMatlab ExamAliceAlormenuNo ratings yet
- 제출용Document28 pages제출용kijmm0997No ratings yet
- 3.4 Loader Design Options: 3.4.1 Linkage EditorsDocument25 pages3.4 Loader Design Options: 3.4.1 Linkage EditorsEñg Šǻmèr ǮrắBiųâtNo ratings yet
- DLL For GenMath - Q1, W3EDocument3 pagesDLL For GenMath - Q1, W3EJigz Vasquez100% (4)
- Karens A-MDocument21 pagesKarens A-Mapi-291270075No ratings yet
- Manual de Instalación - Tableros Centro de Carga - Marca GEDocument4 pagesManual de Instalación - Tableros Centro de Carga - Marca GEmariana0% (1)
- Join The Club: C207 - Database Systems 2012Document237 pagesJoin The Club: C207 - Database Systems 2012hamzahNo ratings yet
- NikeDocument3 pagesNikeAadnya UjagareNo ratings yet
- University of Michigan Dissertation ArchiveDocument6 pagesUniversity of Michigan Dissertation ArchiveBuyResumePaperUK100% (1)
- Exercises No 1: Exercise 1Document6 pagesExercises No 1: Exercise 1M ILHAM HATTANo ratings yet
- Midas - NFX - 2022R1 - Release NoteDocument10 pagesMidas - NFX - 2022R1 - Release NoteCristian Camilo Londoño PiedrahítaNo ratings yet
- Pinoy Development of Groups and TeamsDocument19 pagesPinoy Development of Groups and TeamsSarah Jane SeñaNo ratings yet
- Diy Direct Drive WheelDocument10 pagesDiy Direct Drive WheelBrad PortelliNo ratings yet
- Ijleo S 23 06033Document26 pagesIjleo S 23 06033Laura DiazNo ratings yet
- Recounttext 160409104911Document9 pagesRecounttext 160409104911Anif Ough GtuwNo ratings yet
- Prefer Would Rather Handout - Exercises Twin SchoolDocument4 pagesPrefer Would Rather Handout - Exercises Twin SchoolhnpereiraNo ratings yet
- 11 Physical Education Keynotes Ch08 Fundamental of AnatomyDocument3 pages11 Physical Education Keynotes Ch08 Fundamental of AnatomyAkashNo ratings yet
- Database Systems, Eleventh Edition by Coronel Morris, Course Technology 2014Document5 pagesDatabase Systems, Eleventh Edition by Coronel Morris, Course Technology 2014LaluMohan KcNo ratings yet
- Market Composition and Performance of Firms in Broiler, Chicken Egg, and Swine Production - Implications To The Philippine Competition ActDocument17 pagesMarket Composition and Performance of Firms in Broiler, Chicken Egg, and Swine Production - Implications To The Philippine Competition ActAshlley Nicole VillaranNo ratings yet
- Bahasa Inggris Lawang SewuDocument12 pagesBahasa Inggris Lawang Sewuaisyah100% (1)
- CHUYÊN ĐỀ CHỈ SỰ NHƯỢNG BỘDocument5 pagesCHUYÊN ĐỀ CHỈ SỰ NHƯỢNG BỘĐinh DuyênNo ratings yet
- An Innovative Method To Increase The Resolution of Optical EncodersDocument6 pagesAn Innovative Method To Increase The Resolution of Optical EncodersFuadMuzaki09No ratings yet
- First Quarterly Assessment Intle7: School Year 2021-2022Document3 pagesFirst Quarterly Assessment Intle7: School Year 2021-2022marjorie rochaNo ratings yet
- Smart Contracts: Functioning and Legal Enforceability in IndiaDocument14 pagesSmart Contracts: Functioning and Legal Enforceability in IndiaPrasanth Raju100% (1)
- Et Annual Report 04 05Document48 pagesEt Annual Report 04 05Pavlo Andre AbiyNo ratings yet
- Peace Journalist Apr2018 WebDocument13 pagesPeace Journalist Apr2018 Websteven youngbloodNo ratings yet
- Think SoftDocument2 pagesThink SoftPankaj JhaNo ratings yet
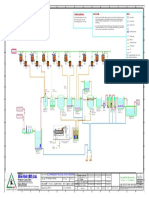
- Alim Knit (BD) LTD.: Recommended Process Flow DiagramDocument1 pageAlim Knit (BD) LTD.: Recommended Process Flow DiagramKamrul HasanNo ratings yet
- Comparative Study of Soil Structure Interaction Analysis of Building On Clayey and Sandy Soil-IJRASETDocument11 pagesComparative Study of Soil Structure Interaction Analysis of Building On Clayey and Sandy Soil-IJRASETIJRASETPublicationsNo ratings yet
- Chapter Two - Geography of Ethiopia - Girma - Part 1Document48 pagesChapter Two - Geography of Ethiopia - Girma - Part 1Natnael Nega100% (1)
- A Remote Home Security System Based On Wireless Sensor Network Using GSM TechnologyDocument3 pagesA Remote Home Security System Based On Wireless Sensor Network Using GSM TechnologyAjith Kumar GSNo ratings yet
- Advisor Webcast - Customizing The Workflows in Oracle EBS ProcurementDocument53 pagesAdvisor Webcast - Customizing The Workflows in Oracle EBS ProcurementhgopalanNo ratings yet