Download as pdf or txt
You might also like
- Solution Manual For Signals and Systems Using Matlab 3rd by ChaparroDocument38 pagesSolution Manual For Signals and Systems Using Matlab 3rd by Chaparroandrotomyboationv7fsf100% (28)
- MatLab CodesDocument8 pagesMatLab CodesJoevelleBaflorNo ratings yet
- Sm-g531h Service ManualDocument79 pagesSm-g531h Service ManualJuliano Strassburg67% (6)
- Lock Out Tag Out Guide NECADocument39 pagesLock Out Tag Out Guide NECAmiguel jimenez guzman100% (1)
- JQA048MAADocument9 pagesJQA048MAAJose IgnacioNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- Formula Sheet Midterm 222Document2 pagesFormula Sheet Midterm 222NawwafNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- Tables of Common Transform Pairs: Notation, Conventions, and Useful FormulasDocument6 pagesTables of Common Transform Pairs: Notation, Conventions, and Useful FormulassisoNo ratings yet
- Sheet 1Document2 pagesSheet 1ahmedmohamedn92No ratings yet
- PDF Solution Manual For Signals and Systems Using Matlab 3Rd by Chaparro Online Ebook Full ChapterDocument74 pagesPDF Solution Manual For Signals and Systems Using Matlab 3Rd by Chaparro Online Ebook Full Chapterronald.martinez745100% (8)
- ELEN3012 - 2020 Part 1Document6 pagesELEN3012 - 2020 Part 1Bongani MofokengNo ratings yet
- Interconnect Delay Models: EE695K VLSI InterconnectDocument16 pagesInterconnect Delay Models: EE695K VLSI InterconnectSuyash SinghNo ratings yet
- Tables of Common Transform Pairs: Notation, Conventions, and Useful FormulasDocument6 pagesTables of Common Transform Pairs: Notation, Conventions, and Useful FormulasKakitani MusicNo ratings yet
- CHAPTER 2 (Done)Document30 pagesCHAPTER 2 (Done)TJ HereNo ratings yet
- Formulario PSDocument4 pagesFormulario PSCarlos RebeloNo ratings yet
- CF NotesDocument7 pagesCF NotesHồ Nghĩa PhươngNo ratings yet
- CS Lecture 4Document29 pagesCS Lecture 4sadaf asmaNo ratings yet
- Formulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Document11 pagesFormulary Systeemanalyse (H00S4A) Systems Theory (H04X3B) : J. Swevers November 2016Bader AlShakhatrahNo ratings yet
- Seminar 0: Fourier Transform, Convolution, CorrelationDocument2 pagesSeminar 0: Fourier Transform, Convolution, CorrelationDavid Omelette du FromageNo ratings yet
- Convolution and Correlation - TutorialspointDocument12 pagesConvolution and Correlation - TutorialspointSavita BhosleNo ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Chapter1: Linear Systems: 1 Peano Baker SeriesDocument17 pagesChapter1: Linear Systems: 1 Peano Baker SeriesprakashsutharNo ratings yet
- Principles of CommunicationDocument42 pagesPrinciples of CommunicationSachin DoddamaniNo ratings yet
- 6 Signals Systems (2021-2022)Document25 pages6 Signals Systems (2021-2022)Ehmed BazNo ratings yet
- 28Sct-1) Ze: Sla2EDocument16 pages28Sct-1) Ze: Sla2EDARKII Q8No ratings yet
- Convolution and CorrelationDocument11 pagesConvolution and CorrelationShameer KhanNo ratings yet
- Signal & Systems-DONEDocument40 pagesSignal & Systems-DONEnavNo ratings yet
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Document18 pagesECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 20-Jan-2014, Room H101Eduardo FerreiraNo ratings yet
- Optical Communication Theory and Techniques: H (T) Z T TDocument3 pagesOptical Communication Theory and Techniques: H (T) Z T TCristian VargasNo ratings yet
- DSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Document22 pagesDSP Summary02 - Prof. YK Shin - INHA-BEU DDP 2023Nigar QurbanovaNo ratings yet
- EEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityDocument15 pagesEEM 306 Introduction To Communications: Department of Electrical and Electronics Engineering Anadolu UniversityGülsüm KilicNo ratings yet
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremKirubasri SNo ratings yet
- 44 Probability ExerciseDocument3 pages44 Probability ExerciseLopez Shian ErvinNo ratings yet
- 2.2 Continuous-Time LTI Systems: The Convolution IntegralDocument12 pages2.2 Continuous-Time LTI Systems: The Convolution IntegralAZIZ UR RAHMANNo ratings yet
- Half Wave Symmetry 4Document2 pagesHalf Wave Symmetry 4hussain ghaziNo ratings yet
- Systems of Linear Equations: 1 Matrix FunctionsDocument12 pagesSystems of Linear Equations: 1 Matrix FunctionsSeow Khaiwen KhaiwenNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- Problem Set 2 SolutionDocument10 pagesProblem Set 2 SolutionAbec One-offNo ratings yet
- Solution of Ordinary Differential Equations: 1 General TheoryDocument3 pagesSolution of Ordinary Differential Equations: 1 General TheoryvlukovychNo ratings yet
- Fourier Series 1Document14 pagesFourier Series 1sightlesswarriorNo ratings yet
- EE3160FA10 FormulasDocument2 pagesEE3160FA10 FormulasbrujrNo ratings yet
- Solutions To Exercise 2: Problem 2.29Document3 pagesSolutions To Exercise 2: Problem 2.29lalitbickNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremBhuvan Susheel MekaNo ratings yet
- Periodic and Dirac DeltaDocument8 pagesPeriodic and Dirac DeltawaalihabuxNo ratings yet
- 信號期中大抄Document2 pages信號期中大抄林昱呈No ratings yet
- Aduh 4Document9 pagesAduh 4Mas FianNo ratings yet
- Digital Control - Sheet 1 SolutionDocument14 pagesDigital Control - Sheet 1 SolutionHesham AbasNo ratings yet
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- 334 1 11 Lec29Document4 pages334 1 11 Lec29almabolivarianaNo ratings yet
- Signals Basic TypesDocument7 pagesSignals Basic TypesJunaid KaleemNo ratings yet
- FALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformDocument7 pagesFALLSEM2020-21 ECE1004 ETH VL2020210101743 Reference Material I 29-Oct-2020 Laplace TransformHARJAP DANDIWALNo ratings yet
- Module3-Signals and SystemsDocument28 pagesModule3-Signals and SystemsAkul PaiNo ratings yet
- Signals and SystemsDocument12 pagesSignals and SystemsTman DokodaNo ratings yet
- Signals and Systems HomeworkDocument3 pagesSignals and Systems HomeworkVong TithtolaNo ratings yet
- Fourier TransformsDocument1 pageFourier TransformsakshayNo ratings yet
- Identification and EstimationDocument37 pagesIdentification and EstimationSam KhanNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- Assignment 2b SolutionsDocument12 pagesAssignment 2b SolutionsvbweuhvbwNo ratings yet
- Reduced Dielectric Losses For Underground Cable Distribution SystemsDocument10 pagesReduced Dielectric Losses For Underground Cable Distribution SystemsIAES OfficeNo ratings yet
- DVLSI Lab EXPT1 ManualDocument8 pagesDVLSI Lab EXPT1 ManualApoorvaNo ratings yet
- Electrónica de Potencia: Laboratorio #05 ArmónicosDocument34 pagesElectrónica de Potencia: Laboratorio #05 ArmónicosJuam YupanquiNo ratings yet
- IEEE Standard Device NumbersDocument1 pageIEEE Standard Device NumbersBA GomNo ratings yet
- Physics For Information Science Course ContentDocument2 pagesPhysics For Information Science Course ContentB KARUPPASAMYNo ratings yet
- PicoKeyer Plus 080501Document10 pagesPicoKeyer Plus 080501diney m e willemenNo ratings yet
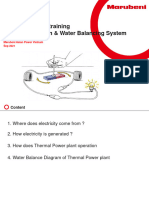
- Power Generation & Water Balancing SystemDocument20 pagesPower Generation & Water Balancing SystemnamakNo ratings yet
- Pilz PNOZ Sigma PDFDocument16 pagesPilz PNOZ Sigma PDFCristopher Entena100% (1)
- Service Manual: Multi Channel Av ReceiverDocument72 pagesService Manual: Multi Channel Av ReceiverAnd BNo ratings yet
- Service Manual: DSC-F828Document29 pagesService Manual: DSC-F828Anonymous Lfgk6vygNo ratings yet
- Tension Control and Winder Application GuideDocument7 pagesTension Control and Winder Application GuideSachuuNo ratings yet
- The Landis+Gyr FQD 2..7 Ripple Control Transmitter With IGBT-technologyDocument6 pagesThe Landis+Gyr FQD 2..7 Ripple Control Transmitter With IGBT-technologykotiniNo ratings yet
- Irfz44N: Power MOSFET V 55V, R 17.5 Mohm, I 49 ADocument1 pageIrfz44N: Power MOSFET V 55V, R 17.5 Mohm, I 49 AFherdzy AnNo ratings yet
- GB C350KVA1.doc 1Document4 pagesGB C350KVA1.doc 1Amr KhaledNo ratings yet
- Brushless and Brushed DC MotorsDocument27 pagesBrushless and Brushed DC MotorsMarc Jairro GajudoNo ratings yet
- 735, 740, & 740 EJECTOR Electrical System Articulated Truck: Harness and Wire Electrical Schematic SymbolsDocument2 pages735, 740, & 740 EJECTOR Electrical System Articulated Truck: Harness and Wire Electrical Schematic SymbolsKolo Bendu100% (1)
- Sepam Series 40 and Its Optional ModulesDocument2 pagesSepam Series 40 and Its Optional ModulesWongSemarangNo ratings yet
- On Induction RegulatorDocument19 pagesOn Induction RegulatorGyanchand SinghNo ratings yet
- DatasheetDocument13 pagesDatasheetTurcu AlinNo ratings yet
- RE 615 Tech 756887 ENm PDFDocument1,224 pagesRE 615 Tech 756887 ENm PDFInsan AzizNo ratings yet
- Man#449Document94 pagesMan#449Oscar MarilungoNo ratings yet
- Model OR 6308 PT: PH, TempDocument2 pagesModel OR 6308 PT: PH, TempAnatech LabNo ratings yet
- 60-80W Power AmplifierDocument7 pages60-80W Power AmplifierMohsen IbrahimNo ratings yet
- Physics PE 1Document3 pagesPhysics PE 1yanikwendu1No ratings yet
- RoboTek Arduino Level 1Document287 pagesRoboTek Arduino Level 1Alliah Pauline Dolor50% (2)
- Digital Multi Meter Fluke 115Document2 pagesDigital Multi Meter Fluke 115industrialindiaNo ratings yet