
Haas Final
Haas Final
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- KL 900aDocument4 pagesKL 900aEdmond Nurellari100% (1)
- Service Manual RCI 6900F150 ENG PDFDocument41 pagesService Manual RCI 6900F150 ENG PDFRichardson Almeida0% (1)
- Charge Pumps, Counters and Delay Locked LoopDocument34 pagesCharge Pumps, Counters and Delay Locked Loopabhishek_nitcNo ratings yet
- Communication PDFDocument0 pagesCommunication PDFwww.bhawesh.com.npNo ratings yet
- A 5-13.5 Gbs Multistandard Receiver With High Jitter Tolerance CDR PDFDocument11 pagesA 5-13.5 Gbs Multistandard Receiver With High Jitter Tolerance CDR PDFMinh KhangNo ratings yet
- AUTOSAR SRS PWMDriverDocument19 pagesAUTOSAR SRS PWMDriverAnand KumarNo ratings yet
- Service Manual M HCP HCP HCP HCP Lta-22n686hcpDocument31 pagesService Manual M HCP HCP HCP HCP Lta-22n686hcpCristina NistorNo ratings yet
- Sdic 2marks (Q & A) (Unit 2)Document4 pagesSdic 2marks (Q & A) (Unit 2)Ganapathy RamadossNo ratings yet
- 1994 TI CDC Clock Distribution Circuits Data BookDocument274 pages1994 TI CDC Clock Distribution Circuits Data BookTodorosss JjNo ratings yet
- Lab Manual LIC&C 2017-18Document40 pagesLab Manual LIC&C 2017-18Arun UpadhyayaNo ratings yet
- Vco 3Document6 pagesVco 3anon_701088587No ratings yet
- HW DSGN Guidelines Spraas1a PDFDocument31 pagesHW DSGN Guidelines Spraas1a PDFsomethingfornowNo ratings yet
- 4046Document13 pages4046JHON HENRRY Q. F.No ratings yet
- Hit 7080 TSMNDocument74 pagesHit 7080 TSMNJoseMiguelBlancoAlvarez100% (1)
- Yaesu FT-11R Service Manual (En)Document64 pagesYaesu FT-11R Service Manual (En)maoNo ratings yet
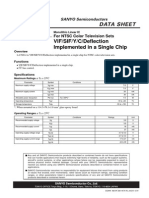
- VIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsDocument35 pagesVIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsLeonel MartinezNo ratings yet
- Mip 1 2008 PDFDocument94 pagesMip 1 2008 PDFlazarosNo ratings yet
- Aiwa Hs Tx491Document16 pagesAiwa Hs Tx491Abid JbitNo ratings yet
- Controlador PotenciaDocument4 pagesControlador PotenciaNia_s2No ratings yet
- Frequency Control of A Current-Fed Inverter For Induction HeatingDocument4 pagesFrequency Control of A Current-Fed Inverter For Induction Heatingu18348794No ratings yet
- Clock Issues in Deep Submircron DesignDocument50 pagesClock Issues in Deep Submircron Designshilpi lavaniaNo ratings yet
- Supply HandbookDocument37 pagesSupply Handbookkxholli03No ratings yet
- EC8491 2 Marks PDFDocument34 pagesEC8491 2 Marks PDFR Gowri ManohariNo ratings yet
- Wireless Chatting System Using RF CommunicationDocument61 pagesWireless Chatting System Using RF CommunicationHareesh Thantanapally100% (4)
- IC-F21 IC-F22 Service ManualDocument40 pagesIC-F21 IC-F22 Service ManualViorel AldeaNo ratings yet
- Owning and Operating The HP 8410 Network Analyzer: Kahrs@caip - Rutgers.eduDocument10 pagesOwning and Operating The HP 8410 Network Analyzer: Kahrs@caip - Rutgers.edukdebesNo ratings yet
- Manual PDFDocument688 pagesManual PDFслава100% (1)
- Ni X SeriesDocument29 pagesNi X SeriesChee An QuekNo ratings yet
- AU6850 Datasheet: USB Host MP3 Decoder SOCDocument20 pagesAU6850 Datasheet: USB Host MP3 Decoder SOCOswaldo Rengifo MuozNo ratings yet
- BSE Electronics SyllabusDocument110 pagesBSE Electronics SyllabusJinu MadhavanNo ratings yet






































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- KL 900aDocument4 pagesKL 900aEdmond Nurellari100% (1)
- Service Manual RCI 6900F150 ENG PDFDocument41 pagesService Manual RCI 6900F150 ENG PDFRichardson Almeida0% (1)
- Charge Pumps, Counters and Delay Locked LoopDocument34 pagesCharge Pumps, Counters and Delay Locked Loopabhishek_nitcNo ratings yet
- Communication PDFDocument0 pagesCommunication PDFwww.bhawesh.com.npNo ratings yet
- A 5-13.5 Gbs Multistandard Receiver With High Jitter Tolerance CDR PDFDocument11 pagesA 5-13.5 Gbs Multistandard Receiver With High Jitter Tolerance CDR PDFMinh KhangNo ratings yet
- AUTOSAR SRS PWMDriverDocument19 pagesAUTOSAR SRS PWMDriverAnand KumarNo ratings yet
- Service Manual M HCP HCP HCP HCP Lta-22n686hcpDocument31 pagesService Manual M HCP HCP HCP HCP Lta-22n686hcpCristina NistorNo ratings yet
- Sdic 2marks (Q & A) (Unit 2)Document4 pagesSdic 2marks (Q & A) (Unit 2)Ganapathy RamadossNo ratings yet
- 1994 TI CDC Clock Distribution Circuits Data BookDocument274 pages1994 TI CDC Clock Distribution Circuits Data BookTodorosss JjNo ratings yet
- Lab Manual LIC&C 2017-18Document40 pagesLab Manual LIC&C 2017-18Arun UpadhyayaNo ratings yet
- Vco 3Document6 pagesVco 3anon_701088587No ratings yet
- HW DSGN Guidelines Spraas1a PDFDocument31 pagesHW DSGN Guidelines Spraas1a PDFsomethingfornowNo ratings yet
- 4046Document13 pages4046JHON HENRRY Q. F.No ratings yet
- Hit 7080 TSMNDocument74 pagesHit 7080 TSMNJoseMiguelBlancoAlvarez100% (1)
- Yaesu FT-11R Service Manual (En)Document64 pagesYaesu FT-11R Service Manual (En)maoNo ratings yet
- VIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsDocument35 pagesVIF/SIF/Y/C/Deflection Implemented in A Single Chip: For NTSC Color Television SetsLeonel MartinezNo ratings yet
- Mip 1 2008 PDFDocument94 pagesMip 1 2008 PDFlazarosNo ratings yet
- Aiwa Hs Tx491Document16 pagesAiwa Hs Tx491Abid JbitNo ratings yet
- Controlador PotenciaDocument4 pagesControlador PotenciaNia_s2No ratings yet
- Frequency Control of A Current-Fed Inverter For Induction HeatingDocument4 pagesFrequency Control of A Current-Fed Inverter For Induction Heatingu18348794No ratings yet
- Clock Issues in Deep Submircron DesignDocument50 pagesClock Issues in Deep Submircron Designshilpi lavaniaNo ratings yet
- Supply HandbookDocument37 pagesSupply Handbookkxholli03No ratings yet
- EC8491 2 Marks PDFDocument34 pagesEC8491 2 Marks PDFR Gowri ManohariNo ratings yet
- Wireless Chatting System Using RF CommunicationDocument61 pagesWireless Chatting System Using RF CommunicationHareesh Thantanapally100% (4)
- IC-F21 IC-F22 Service ManualDocument40 pagesIC-F21 IC-F22 Service ManualViorel AldeaNo ratings yet
- Owning and Operating The HP 8410 Network Analyzer: Kahrs@caip - Rutgers.eduDocument10 pagesOwning and Operating The HP 8410 Network Analyzer: Kahrs@caip - Rutgers.edukdebesNo ratings yet
- Manual PDFDocument688 pagesManual PDFслава100% (1)
- Ni X SeriesDocument29 pagesNi X SeriesChee An QuekNo ratings yet
- AU6850 Datasheet: USB Host MP3 Decoder SOCDocument20 pagesAU6850 Datasheet: USB Host MP3 Decoder SOCOswaldo Rengifo MuozNo ratings yet
- BSE Electronics SyllabusDocument110 pagesBSE Electronics SyllabusJinu MadhavanNo ratings yet