Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Vogue USA - January 2021Document94 pagesVogue USA - January 2021Andreea Dana100% (6)
- Unimog Body and Implement Mounting GuidelinesDocument288 pagesUnimog Body and Implement Mounting GuidelinesDon LariviereNo ratings yet
- Catalog Tiger Quick ChangeDocument44 pagesCatalog Tiger Quick ChangeDon LariviereNo ratings yet
- M35A3 Tire ReplacementDocument24 pagesM35A3 Tire ReplacementDon LariviereNo ratings yet
- 2018 American Iron RulesDocument17 pages2018 American Iron RulesDon LariviereNo ratings yet
- EPASDocument2 pagesEPASDon LariviereNo ratings yet
- Ford Mustang 2015-2017 PDFDocument9,517 pagesFord Mustang 2015-2017 PDFDon Lariviere100% (1)
- Galil ComDocument301 pagesGalil ComDon LariviereNo ratings yet
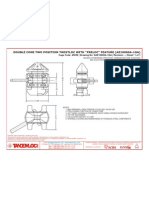
- Tandemloc Vert Lock Ae10000a-1gaDocument1 pageTandemloc Vert Lock Ae10000a-1gaDon LariviereNo ratings yet
- Tandemloc Iso Container InfoDocument4 pagesTandemloc Iso Container InfoDon LariviereNo ratings yet
- Tandemloc Iso Container InfoDocument4 pagesTandemloc Iso Container InfoDon LariviereNo ratings yet
- Analysis of Research On Amazon AWS Cloud Computing Seller Data SecuritDocument6 pagesAnalysis of Research On Amazon AWS Cloud Computing Seller Data SecuritIjrei JournalNo ratings yet
- Frichicks Swot and Case StudyDocument5 pagesFrichicks Swot and Case StudyNaoman ChNo ratings yet
- Digital Marketing Strategy and Marketing Mix UploadDocument39 pagesDigital Marketing Strategy and Marketing Mix UploadAmisha LalNo ratings yet
- The National Insurance Board Funeral Grant Application NI8: (Please Use Capitals Letters)Document4 pagesThe National Insurance Board Funeral Grant Application NI8: (Please Use Capitals Letters)Allison Nadine MarchandNo ratings yet
- C-130 Emergency ProceduresDocument46 pagesC-130 Emergency ProceduresFSNo ratings yet
- Setting Up An Inventory Valuation Report in Dynamics AX Part 1 & 2Document18 pagesSetting Up An Inventory Valuation Report in Dynamics AX Part 1 & 2Fathy TahaNo ratings yet
- Proposed Blended Learning Model For Don Mariano Marcos Memorial State University - South La Union Campus (Dmmmsu-Sluc)Document8 pagesProposed Blended Learning Model For Don Mariano Marcos Memorial State University - South La Union Campus (Dmmmsu-Sluc)Jose JarlathNo ratings yet
- XyzDocument2 pagesXyzaomltNo ratings yet
- CMMG MK47 Mutant Black Rifle DetailsDocument2 pagesCMMG MK47 Mutant Black Rifle DetailsAmmoLand Shooting Sports NewsNo ratings yet
- BIM 2094 International Management: Team Task 4Document7 pagesBIM 2094 International Management: Team Task 4jack015043No ratings yet
- Caram Vs LauretagDocument1 pageCaram Vs LauretagALLYSSA JANE R. RUALLONo ratings yet
- Obana Vs CaDocument4 pagesObana Vs Cada_sein32No ratings yet
- Income Certificate-1Document1 pageIncome Certificate-1ratiranjan mohapatraNo ratings yet
- Vesta Cylinder Shuttle Manual Part 1Document9 pagesVesta Cylinder Shuttle Manual Part 1celsribeiroNo ratings yet
- FGP WPMP BrochureDocument12 pagesFGP WPMP BrochureArbiMuratajNo ratings yet
- ADB Annual Report 1999Document317 pagesADB Annual Report 1999Asian Development BankNo ratings yet
- Article Hotel ValuationDocument7 pagesArticle Hotel ValuationphamianickNo ratings yet
- Chapter 12chemical KineticsDocument5 pagesChapter 12chemical KineticsKevin HuangNo ratings yet
- 3WA11 DatashDocument9 pages3WA11 DatashsuadNo ratings yet
- An Analysis of Public Bus Transit Performance in Indian CitiesDocument22 pagesAn Analysis of Public Bus Transit Performance in Indian CitiesVismithaNo ratings yet
- HP 9085mfpDocument64 pagesHP 9085mfpPatrick ToledoNo ratings yet
- AMT49413 DatasheetDocument21 pagesAMT49413 DatasheetShubham PanchbhaiNo ratings yet
- SAP - MM Introduction & Enterprise StructureDocument40 pagesSAP - MM Introduction & Enterprise Structuresruthimannam28No ratings yet
- Group Activity Questions Buss. MathDocument1 pageGroup Activity Questions Buss. MathIreneRoseMotas100% (1)
- Evaluating The Potential Impact of Ototoxicant Exposure On Worker HealthDocument17 pagesEvaluating The Potential Impact of Ototoxicant Exposure On Worker Healthani putkaradzeNo ratings yet
- Suntay vs. CA Case DigestDocument3 pagesSuntay vs. CA Case DigestCaitlin Kintanar100% (2)
- Manual Malahiteam En-1Document38 pagesManual Malahiteam En-1giuseppi conte100% (1)
- Defining SponsorshipDocument102 pagesDefining SponsorshipShaun Whatling100% (1)
- This Masquerade Chords by George Benson - Songsterr Tabs With Rhythm PDFDocument1 pageThis Masquerade Chords by George Benson - Songsterr Tabs With Rhythm PDFFrancisco_JNo ratings yet