Download as pdf or txt
You might also like
- Energy Engineering Question Bank - NSDocument7 pagesEnergy Engineering Question Bank - NSNilesh Singh100% (1)
- Eastar SpecificationsDocument2 pagesEastar SpecificationsUmar ShamsudinNo ratings yet
- Hi VAWT Brief (New Version)Document80 pagesHi VAWT Brief (New Version)ifmatosNo ratings yet
- Industrial AerodynamicsDocument32 pagesIndustrial AerodynamicsSenthamil ArasanNo ratings yet
- Performance Enhancements On Vertical Axis Wind Turbines Using Flow Augmentation Systems A Review 2017 Renewable and Sustainable Energy ReviewsDocument18 pagesPerformance Enhancements On Vertical Axis Wind Turbines Using Flow Augmentation Systems A Review 2017 Renewable and Sustainable Energy ReviewsCleyson GomesNo ratings yet
- Experimental Investigation of Stepped Aerofoil Using Propeller Test RigDocument4 pagesExperimental Investigation of Stepped Aerofoil Using Propeller Test RigesatjournalsNo ratings yet
- Performance Improvement of Solar PV Cells Using Various Cooling Methods: A ReviewDocument5 pagesPerformance Improvement of Solar PV Cells Using Various Cooling Methods: A ReviewEditor IJRITCCNo ratings yet
- Wind Turbine Hawt Vs VawtDocument12 pagesWind Turbine Hawt Vs VawtsmcsamindaNo ratings yet
- 1.VAWT - AirFoil Optimization - Final - Thesis PDFDocument93 pages1.VAWT - AirFoil Optimization - Final - Thesis PDFRanga SriNo ratings yet
- Wind Turbine Efficiency ExperimentDocument7 pagesWind Turbine Efficiency ExperimentcwahrenburgNo ratings yet
- ASI Full NotesDocument171 pagesASI Full NotesmuthumariNo ratings yet
- RVSM Implementation in MalaysiaDocument31 pagesRVSM Implementation in MalaysiaIstas NusyirwanNo ratings yet
- Marc Twister 300 TDocument4 pagesMarc Twister 300 TDavid MouraNo ratings yet
- Module 4Document10 pagesModule 4Sean Kyle VillarNo ratings yet
- Aerofoil Assignment PDFDocument24 pagesAerofoil Assignment PDFTissara Nalin100% (1)
- AnsysDocument137 pagesAnsysViji55555No ratings yet
- Wind TurbineDocument6 pagesWind TurbineMuhammad AbdullahNo ratings yet
- Wind Turbine Airfoil CatalogueDocument152 pagesWind Turbine Airfoil CataloguepanosscribdNo ratings yet
- CFD Lab1-Exercise Note PDFDocument10 pagesCFD Lab1-Exercise Note PDFSaad Al HelyNo ratings yet
- VAWT Thermal Stresses AnalysisDocument43 pagesVAWT Thermal Stresses AnalysisNishant KumarNo ratings yet
- QBlade Guidelines v09Document37 pagesQBlade Guidelines v09Anonymous dDnX0ntEQNo ratings yet
- LIGA ApplicationDocument13 pagesLIGA ApplicationPiranha TourniquetNo ratings yet
- Nanocraft - An Aircraft WithDocument6 pagesNanocraft - An Aircraft WithiaetsdiaetsdNo ratings yet
- Drone NotesDocument6 pagesDrone NotesheypartygirlNo ratings yet
- Content: Weight and Balance Equipment Preparing An Aircraft For WeighingDocument10 pagesContent: Weight and Balance Equipment Preparing An Aircraft For WeighingMuhammad RidwanNo ratings yet
- Air Bearing CalculationDocument47 pagesAir Bearing CalculationtomekzawistowskiNo ratings yet
- Particle Image VelocimetryDocument2 pagesParticle Image VelocimetrySaravana Kumar LakshmananNo ratings yet
- Mod 11 Basic ..Document68 pagesMod 11 Basic ..siraj.ahmidinaNo ratings yet
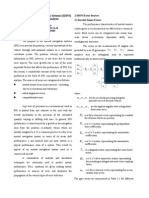
- INS Error Propagation (IEEE Format)Document11 pagesINS Error Propagation (IEEE Format)SenthilKumarSNo ratings yet
- Types of Jet EnginesDocument2 pagesTypes of Jet EnginesSafi Ullah WarraichNo ratings yet
- Far 43 PDFDocument30 pagesFar 43 PDFscratchstNo ratings yet
- Chapter 1 - UZEMDocument39 pagesChapter 1 - UZEMNOURATEFNUMAN ALIJELNo ratings yet
- Air Data ComputerDocument5 pagesAir Data Computeropenid_HsJaS0hjNo ratings yet
- Design of Unmanned Aerial Combat VehicleDocument70 pagesDesign of Unmanned Aerial Combat Vehiclemurad_ashourNo ratings yet
- Federal Aviation AdministrationDocument28 pagesFederal Aviation AdministrationAreeba JavedNo ratings yet
- 1.2b Water Tunnel:: Fig 1.2: Trapezoidal Wing at The End of The Wind TunnelDocument2 pages1.2b Water Tunnel:: Fig 1.2: Trapezoidal Wing at The End of The Wind Tunnelirctcsbt6bimblikipilNo ratings yet
- Question BankDocument20 pagesQuestion Bankadolfo3991No ratings yet
- Dynamic Analysis of Corrugated Control Surface For Flutter SupressionDocument87 pagesDynamic Analysis of Corrugated Control Surface For Flutter SupressionPrashanth TelkarNo ratings yet
- PHD Gulshan Sachdeva 1099MDocument173 pagesPHD Gulshan Sachdeva 1099MAlphy ThomasNo ratings yet
- Design Alpha Stirling EngineDocument70 pagesDesign Alpha Stirling EngineCedricNo ratings yet
- Aircraft Instrumentation Notes 1st UnitDocument12 pagesAircraft Instrumentation Notes 1st UnitSantosh KumarNo ratings yet
- Kline-Fogleman Airfoil Comparison Study 2-1Document8 pagesKline-Fogleman Airfoil Comparison Study 2-1shibin874141No ratings yet
- 2016 Cryptography and Information Security in BalkansDocument209 pages2016 Cryptography and Information Security in BalkansFajri Fathur RahmanNo ratings yet
- Smoke Tunnel ReportDocument11 pagesSmoke Tunnel ReportRana HanzlaNo ratings yet
- Reverse TCPDocument22 pagesReverse TCPQuangHuyĐoànNo ratings yet
- Module 11 Aeroplane Aerodynamics, Structures and SystemsDocument16 pagesModule 11 Aeroplane Aerodynamics, Structures and SystemsBhaskerNegiNo ratings yet
- WCB Factory Price Small Hydraulic Slew Drive Worm Gear Slewing Ring Bearing For Solar Tracker SystemDocument7 pagesWCB Factory Price Small Hydraulic Slew Drive Worm Gear Slewing Ring Bearing For Solar Tracker SystemWCB BEARINGNo ratings yet
- Aircraft Systems 2Document17 pagesAircraft Systems 2Deepak V DasNo ratings yet
- Systems Theory - UndergraduateDocument22 pagesSystems Theory - Undergraduatedidi vlogNo ratings yet
- Power Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyDocument69 pagesPower Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyLenin PaudelNo ratings yet
- Design and Construction of Drip Irrigation System For Draught AreasDocument16 pagesDesign and Construction of Drip Irrigation System For Draught AreasIJRASETPublicationsNo ratings yet
- I. Principles of Wind EnergyDocument3 pagesI. Principles of Wind EnergyJohn TauloNo ratings yet
- .Highway Power Generation Using Low Cost Vertical Axis Wind Turbine (VAWT) PDFDocument5 pages.Highway Power Generation Using Low Cost Vertical Axis Wind Turbine (VAWT) PDFGautham NNo ratings yet
- Stablity, Control and LimitationsDocument359 pagesStablity, Control and LimitationsgadisaNo ratings yet
- Stage SeparationDocument10 pagesStage SeparationJabez RichardsNo ratings yet
- Af100 0114+ PDFDocument4 pagesAf100 0114+ PDFDiptoNo ratings yet
- 45-Article Text-164-2-10-20230402Document6 pages45-Article Text-164-2-10-20230402hakim.elhoujajiNo ratings yet
- Energy and Exergy Efficiency ComparisonDocument12 pagesEnergy and Exergy Efficiency ComparisonEfrain ValleNo ratings yet
- Performance of A Contra-Rotating Small Wind Energy ConverterDocument25 pagesPerformance of A Contra-Rotating Small Wind Energy ConverterSukhoiLoverNo ratings yet
- Arf 2015 VawtDocument12 pagesArf 2015 VawtBabar MughalNo ratings yet
- 234643397Document7 pages234643397Maung PhyoNo ratings yet
- ThevoidsummaryDocument6 pagesThevoidsummaryVaibhav Mishra80% (5)
- Free - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsDocument44 pagesFree - Space W - Band Setup For The Electrical Characterization of Materials and MM - Wave ComponentsthomasNo ratings yet
- THE Cost OF Delay IN ConstructionDocument3 pagesTHE Cost OF Delay IN ConstructionJonathan WallaceNo ratings yet
- Total DataDocument984 pagesTotal DataajayNo ratings yet
- Unit 1 Nissim Ezekiel and Eunice de Souza: 1.0 ObjectivesDocument14 pagesUnit 1 Nissim Ezekiel and Eunice de Souza: 1.0 ObjectivesJasmineNo ratings yet
- AHU Vibration Data - PostingDocument2 pagesAHU Vibration Data - PostingNeal JohnsonNo ratings yet
- 11th English BE Confident 5 Test Questions With Answer PDF DownloadDocument57 pages11th English BE Confident 5 Test Questions With Answer PDF Downloadbsai2749No ratings yet
- MTS719# 2u2s2wc-21Document2 pagesMTS719# 2u2s2wc-21glukkerNo ratings yet
- Al Boury Oil FieldDocument11 pagesAl Boury Oil FieldSherif MohammedNo ratings yet
- GeoGauge - Verifier Mass GuideDocument4 pagesGeoGauge - Verifier Mass GuideOmar CarlosNo ratings yet
- Resume of Noah C.D. HillDocument3 pagesResume of Noah C.D. HillNoah (AmericanGuy)No ratings yet
- Error - Failed To Compute Elastoplastic Strain Variables - 1150 - Knowledge Base PDFDocument3 pagesError - Failed To Compute Elastoplastic Strain Variables - 1150 - Knowledge Base PDFmatinNo ratings yet
- The Preschooler and The SchoolerDocument16 pagesThe Preschooler and The Schoolerquidditch07No ratings yet
- Practical Research 2: Data Gathering ProceduresDocument8 pagesPractical Research 2: Data Gathering ProceduresJosua GarciaNo ratings yet
- Aptis Writing C1Document33 pagesAptis Writing C1Sanjar JumayevNo ratings yet
- GE4.2 Bearing Capacity EquationsDocument66 pagesGE4.2 Bearing Capacity EquationsInter Galactic0% (1)
- Brac Bank LimitedDocument1 pageBrac Bank LimitedMd Mojibar RahmanNo ratings yet
- 21st Century Skills PaperDocument8 pages21st Century Skills PaperemilyraleyNo ratings yet
- 1 s2.0 S096098221730708X MainDocument5 pages1 s2.0 S096098221730708X Mainrotinda bilekNo ratings yet
- PC3000 6 PDFDocument8 pagesPC3000 6 PDFRocioSanchezCalderonNo ratings yet
- Topic 4-Bv2Document77 pagesTopic 4-Bv2hooranghooraeNo ratings yet
- Geostr C: Engineering and Testing ServicesDocument2 pagesGeostr C: Engineering and Testing ServicesTechnical Priyanka GroupNo ratings yet
- DMA Actuator Drives For - Motorised Butterfly Valve DMK - Motorised Throttle DMLDocument8 pagesDMA Actuator Drives For - Motorised Butterfly Valve DMK - Motorised Throttle DMLemil_88No ratings yet
- 10 1039@d0mh00081gDocument20 pages10 1039@d0mh00081gHuấn BùiNo ratings yet
- Flood Precast - Super Wideslab Load Span TablesDocument1 pageFlood Precast - Super Wideslab Load Span TablesRaymond KinnairdNo ratings yet
- Commercial Negotiations NotesDocument14 pagesCommercial Negotiations NotesJoan Foster100% (1)
- Internship Report - AmtechDocument31 pagesInternship Report - AmtechRahil ShahNo ratings yet
- Oxford Thesis CollectionDocument5 pagesOxford Thesis Collectionkimberlybundypittsburgh100% (2)
- F2103033842Document5 pagesF2103033842Matin AhmedNo ratings yet