Download as pdf or txt
You might also like
- Behavior of Concrete Under Biaxial StressesDocument11 pagesBehavior of Concrete Under Biaxial StressesJakob Fisker50% (2)
- CPH O2022 EnglishDocument16 pagesCPH O2022 EnglishHieu Phung Cong100% (2)
- Introduction To Nonlinear OpticsDocument276 pagesIntroduction To Nonlinear OpticsAmit Bagga100% (4)
- Moct Seminar ReportDocument20 pagesMoct Seminar ReportGaurav Soni25% (4)
- PLL Design ReportDocument30 pagesPLL Design Reporthasin986No ratings yet
- RCC Theory and Design - M. G. Shah and C. M. KaleDocument167 pagesRCC Theory and Design - M. G. Shah and C. M. Kaleswapnil0% (2)
- Yariv Optical WavesDocument6 pagesYariv Optical Wavesbto75000% (5)
- Phased Array Polarization Switches: Application Note POL-1Document9 pagesPhased Array Polarization Switches: Application Note POL-1Omid MomenNo ratings yet
- Circular Polarized Feed Systems3Document5 pagesCircular Polarized Feed Systems3IvoNo ratings yet
- 1.1 Introduction:-: Function of Power CylinderDocument18 pages1.1 Introduction:-: Function of Power CylinderAbhishek SahaNo ratings yet
- Helicon Modes in A Cylindrical Plasma Source: Home Search Collections Journals About Contact Us My IopscienceDocument10 pagesHelicon Modes in A Cylindrical Plasma Source: Home Search Collections Journals About Contact Us My IopscienceAndreescu Anna-Maria TheodoraNo ratings yet
- Piezoelectric Effect Piezo Techlology Tutorial PI CeramicDocument38 pagesPiezoelectric Effect Piezo Techlology Tutorial PI CeramicSarli KinantiNo ratings yet
- A New Feedback Control Method To Stabilize Fiber-Optical Parametric OscillatorsDocument3 pagesA New Feedback Control Method To Stabilize Fiber-Optical Parametric OscillatorsIwan de AngeloNo ratings yet
- Is BN 9514269381Document157 pagesIs BN 9514269381darkforcesNo ratings yet
- Ii. Literature ReviewDocument3 pagesIi. Literature ReviewRamanathan SunderNo ratings yet
- Power Electronic Converters For Grid-Connected Photovoltaic SystemsDocument27 pagesPower Electronic Converters For Grid-Connected Photovoltaic SystemsEzekiel MuyembeNo ratings yet
- Rotor Rso Reflectometer TYPE TDR100 and TDR100RBDocument38 pagesRotor Rso Reflectometer TYPE TDR100 and TDR100RBDevas ShuklaNo ratings yet
- Fiber-Optic Current and Voltage Sensors For High-Voltage Substations PDFDocument4 pagesFiber-Optic Current and Voltage Sensors For High-Voltage Substations PDFDaniel AdebayoNo ratings yet
- Utilization of the Cyclic Interferometer in PolariDocument14 pagesUtilization of the Cyclic Interferometer in PolariKuldeepNo ratings yet
- EGE Opto SensorsDocument16 pagesEGE Opto SensorsYing Kei ChanNo ratings yet
- Turbine Supervisory Instruments 06052014Document34 pagesTurbine Supervisory Instruments 06052014Suman GhoshNo ratings yet
- 2005 - Internoise 2005 Dynamic Analysis of A New Piezoelectric Flextensional Actuator Using The J1 - J4 Optical Interferometric MethodDocument10 pages2005 - Internoise 2005 Dynamic Analysis of A New Piezoelectric Flextensional Actuator Using The J1 - J4 Optical Interferometric MethodClaudioCaetanoNo ratings yet
- Micro MMW PsDocument7 pagesMicro MMW Psaldern_foxgloveNo ratings yet
- Tektronix OscilloscopesDocument30 pagesTektronix OscilloscopesBrad JestinNo ratings yet
- IEEE Xplore Full-Text PDFDocument10 pagesIEEE Xplore Full-Text PDFpshyciNo ratings yet
- Holland Pump Directional Drilling BrochureDocument6 pagesHolland Pump Directional Drilling BrochureleoNo ratings yet
- State and Explain Barkhausen's Criteria For Sustained Oscillation 1Document5 pagesState and Explain Barkhausen's Criteria For Sustained Oscillation 1Ayush NinaweNo ratings yet
- GuideDocument8 pagesGuideArun KumarNo ratings yet
- Saminar On MoctDocument17 pagesSaminar On MoctSitender LodiwalNo ratings yet
- G2 E04Document50 pagesG2 E04bastechNo ratings yet
- A Single-Feed High-Gain Fabry-Perot Antenna With Reconfigurable Polarization CapabilityDocument3 pagesA Single-Feed High-Gain Fabry-Perot Antenna With Reconfigurable Polarization CapabilityjmohitjNo ratings yet
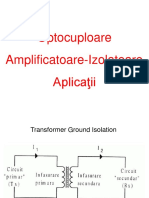
- Optocuploare Amplificatoare-Izolatoare AplicaţiiDocument72 pagesOptocuploare Amplificatoare-Izolatoare AplicaţiiVitaly VitalyNo ratings yet
- Samyung SafetyEquipment SEP406 InstructionManualDocument41 pagesSamyung SafetyEquipment SEP406 InstructionManualMacro LoveNo ratings yet
- Hybrid SyntehsizerDocument5 pagesHybrid Syntehsizervisava789No ratings yet
- Topic On Microwave XPIC-BDocument20 pagesTopic On Microwave XPIC-BHUgo Medrano100% (4)
- 41-133 2FDocument28 pages41-133 2FNanda GaleaNo ratings yet
- Jpe 8-4-6 PDFDocument13 pagesJpe 8-4-6 PDF386No ratings yet
- 5.5 A Quadrature Relaxation Oscillator With A Process-Induced Frequency-Error Compensation LoopDocument3 pages5.5 A Quadrature Relaxation Oscillator With A Process-Induced Frequency-Error Compensation Loopeng_abdelghany1979No ratings yet
- Design of Electrically Tunable Phase Shifter For Antenna Arrays Operating in Ku-BandDocument6 pagesDesign of Electrically Tunable Phase Shifter For Antenna Arrays Operating in Ku-Bandriccardo tarelliNo ratings yet
- Felipe Momag v2Document5 pagesFelipe Momag v2Felipe SouzaNo ratings yet
- optappl_5001p69Document13 pagesoptappl_5001p69KuldeepNo ratings yet
- The KeyphasorDocument8 pagesThe KeyphasorPPMNo ratings yet
- Frequency Stabilization of Internal-Mirror Helium-Neon LasersDocument3 pagesFrequency Stabilization of Internal-Mirror Helium-Neon Lasersaj7scribdNo ratings yet
- Measurement of PhaseDocument73 pagesMeasurement of PhaseHoàng ChươngNo ratings yet
- Synchro Transmitter and Receiver 14pDocument14 pagesSynchro Transmitter and Receiver 14prixa11663No ratings yet
- Lab 5Document3 pagesLab 5Oblivion SlaysNo ratings yet
- Fast Frequency Acquisition Phase-Frequency Detectors For Gsamples S Phase-Locked LoopsDocument4 pagesFast Frequency Acquisition Phase-Frequency Detectors For Gsamples S Phase-Locked LoopsGavin WangNo ratings yet
- Experiment No.-9: Objective:-Brief TheoryDocument5 pagesExperiment No.-9: Objective:-Brief TheoryMayank ChandrolNo ratings yet
- BX51 P PDFDocument6 pagesBX51 P PDFRepresentaciones y Distribuciones FALNo ratings yet
- Wireless Power Transmission 2Document6 pagesWireless Power Transmission 2St. Anne's CET (EEE Department)No ratings yet
- Wireless Power Transmission Batch7Document7 pagesWireless Power Transmission Batch7St. Anne's CET (EEE Department)No ratings yet
- Solar InvereterDocument47 pagesSolar InvereterReshma RaviNo ratings yet
- Describe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingDocument8 pagesDescribe The Construction of A Electromagnetic Velocity Sensor and Explain Its WorkingJiten Thakur100% (1)
- Experiment Number 7 Phase Locked Loop (PLL) : The Lock RangeDocument4 pagesExperiment Number 7 Phase Locked Loop (PLL) : The Lock RangeNikita KanchanNo ratings yet
- Cathod Ray Oscilloscopes - NotesDocument22 pagesCathod Ray Oscilloscopes - NotesVineela ThonduriNo ratings yet
- Installation and Control of Cycloconverter To Low Frequency AC Power Cable TransmissionDocument6 pagesInstallation and Control of Cycloconverter To Low Frequency AC Power Cable TransmissionTun tun linNo ratings yet
- 7 NE72 enDocument20 pages7 NE72 enNanoNo ratings yet
- ESM740G TiristorDocument2 pagesESM740G Tiristorjosenicolas12000No ratings yet
- Design and Analysis of Phase Locked Loop in 90mm CmosDocument7 pagesDesign and Analysis of Phase Locked Loop in 90mm CmosabhishekNo ratings yet
- Distortion and NoiseDocument13 pagesDistortion and NoiseSomanshu MishraNo ratings yet
- A Novel Arc Model For Very Fast Transient Overvoltage Simulation in A 252-kV Gas-Insulated SwitchgearDocument7 pagesA Novel Arc Model For Very Fast Transient Overvoltage Simulation in A 252-kV Gas-Insulated SwitchgearRoberto SuNo ratings yet
- Feedbacksys 123Document16 pagesFeedbacksys 123Kimbeng FaithNo ratings yet
- Chapter-1: Conventional SRF-PLL Under Unbalanced Grid Conditions 3 7Document23 pagesChapter-1: Conventional SRF-PLL Under Unbalanced Grid Conditions 3 7Karthik VanamNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Biaxial Interference Figures F12Document20 pagesBiaxial Interference Figures F12dcegarciamapuaNo ratings yet
- Experimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrasDocument27 pagesExperimental Stress Analysis Prof. K. Ramesh Department of Applied Mechanics Indian Institute of Technology, MadrastamizhanNo ratings yet
- CH 4-EM Waves in Anisotropic MediaDocument51 pagesCH 4-EM Waves in Anisotropic MediaFerrando NañezNo ratings yet
- Slope Inclinometers For Landslides: Technical DevelopmentDocument12 pagesSlope Inclinometers For Landslides: Technical DevelopmentFarhat JavedNo ratings yet
- New Molecular Materials For Nonlinear Optics: Preparation and Detailed CharacterisationDocument144 pagesNew Molecular Materials For Nonlinear Optics: Preparation and Detailed CharacterisationJanaMathauserovaNo ratings yet
- 4.222 S.y.b.sc - Physics Sem III IVDocument24 pages4.222 S.y.b.sc - Physics Sem III IVChandan GuptaNo ratings yet
- (Marchenko) Demonstrational Optics IDocument297 pages(Marchenko) Demonstrational Optics Iswagat ANo ratings yet
- Notess CBSE Class 12 Physics Notes - Wave OpticsDocument10 pagesNotess CBSE Class 12 Physics Notes - Wave OpticsPrashant KoreNo ratings yet
- SYBSc Sem IV Question Bank - Physics I - Unit II and IIIDocument6 pagesSYBSc Sem IV Question Bank - Physics I - Unit II and IIIjadhav742004No ratings yet
- 1.6 Isotropic and Anisotropic MineralsDocument53 pages1.6 Isotropic and Anisotropic MineralsBowoxs Si War WerNo ratings yet
- 7.chapter 5 Column PDFDocument73 pages7.chapter 5 Column PDFSeventh SkyNo ratings yet
- Skinner 2014Document58 pagesSkinner 2014Kesya SaragihNo ratings yet
- Anomalous Interference Colors IDDocument2 pagesAnomalous Interference Colors IDCharmaine Dela CruzNo ratings yet
- January 2003Document95 pagesJanuary 2003Daniel SavaNo ratings yet
- Tut Sheet 2016 EnggDocument14 pagesTut Sheet 2016 EnggCharanjeet Bhatia0% (1)
- 1974 - Drexhage - Progress in opticsXII - Interaction of Light With Monomolcular Light Layers PDFDocument71 pages1974 - Drexhage - Progress in opticsXII - Interaction of Light With Monomolcular Light Layers PDFkrisNo ratings yet
- Is.13946.2.1994 - Hydrofracturing and Over Coring - Part2Document14 pagesIs.13946.2.1994 - Hydrofracturing and Over Coring - Part2amit_halcrowNo ratings yet
- (Architecture Ebook) Design of Masonry StructuresDocument23 pages(Architecture Ebook) Design of Masonry StructuresFauziah AzizNo ratings yet
- Comportamiento Del Concreto Prereforzado BiaxialDocument11 pagesComportamiento Del Concreto Prereforzado BiaxialKaren ASNo ratings yet
- "Footings" - Rectangular Spread Footing Analysis: Program DescriptionDocument8 pages"Footings" - Rectangular Spread Footing Analysis: Program DescriptionOmar RubioNo ratings yet
- PPTDocument29 pagesPPTMahendra MandalapuNo ratings yet
- Mineral in Thin SectionDocument30 pagesMineral in Thin SectionJorgeTrabajo100% (3)
- Introduction To Optical BirefringenceDocument11 pagesIntroduction To Optical BirefringenceLiliana MeriacriNo ratings yet
- 6 Column DesignDocument33 pages6 Column DesignEpoka's EngNo ratings yet
- Kumar 2018Document23 pagesKumar 2018Maksud Khan EmonNo ratings yet