Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Hack Instagram MethodesDocument20 pagesHack Instagram MethodesKamerom Cunningham100% (5)
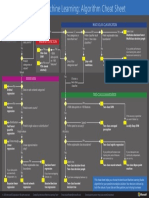
- Microsoft Machine Learning Algorithm Cheat Sheet v2 PDFDocument1 pageMicrosoft Machine Learning Algorithm Cheat Sheet v2 PDFamitag007100% (1)
- 2012 HDD Capital Equipment Market & Technology Report 021112Document24 pages2012 HDD Capital Equipment Market & Technology Report 021112Paramesr KhettsupanNo ratings yet
- 1 Month GMAT Study PlanDocument7 pages1 Month GMAT Study PlanramrcvNo ratings yet
- Ugi Uxloader - MDG EamDocument30 pagesUgi Uxloader - MDG Eamsudhakar lankapothuNo ratings yet
- White Paper HP NGOSS Blueprint and Solutions PDFDocument16 pagesWhite Paper HP NGOSS Blueprint and Solutions PDFSridhar SonthaNo ratings yet
- Goibibo Eticket PDFDocument1 pageGoibibo Eticket PDFAshok KumarNo ratings yet
- Moxa Uport Driver Port Guide For Arm Based Platforms Tech Note v1.2Document39 pagesMoxa Uport Driver Port Guide For Arm Based Platforms Tech Note v1.2Control PcymNo ratings yet
- ABB E Learning CoursesDocument3 pagesABB E Learning Coursesshubham kulshreshthaNo ratings yet
- UNIT-3 NotesDocument13 pagesUNIT-3 NotesGuruprasad SangaNo ratings yet
- DuffDocument44 pagesDuffNikolai_No ratings yet
- (Cô Vũ Mai Phương) Đề Thi Dễ Trúng Tủ Ôn Thi Giữa Học Kì 1 Lớp 12 - Chương Trình Mới - Đề Số 02Document6 pages(Cô Vũ Mai Phương) Đề Thi Dễ Trúng Tủ Ôn Thi Giữa Học Kì 1 Lớp 12 - Chương Trình Mới - Đề Số 02Huy Đỗ QuangNo ratings yet
- Working With Environment Variables Through AutolispDocument6 pagesWorking With Environment Variables Through AutolispGiuseppe LiniNo ratings yet
- 2015-16 Sy BbaDocument26 pages2015-16 Sy BbamakarandwathNo ratings yet
- Panipat Thermal Power StationDocument35 pagesPanipat Thermal Power StationJayant rohillaNo ratings yet
- Chapter 05Document88 pagesChapter 05Keith Tanaka MagakaNo ratings yet
- PPF SampleDocument6 pagesPPF Samplemaimoona_chaudhryNo ratings yet
- Data Sheet 6AV2124-0GC01-0AX0: General InformationDocument10 pagesData Sheet 6AV2124-0GC01-0AX0: General InformationmhaioocNo ratings yet
- Math 105Document24 pagesMath 105ShailendraPatelNo ratings yet
- CasoRegistroCurso UMLDocument12 pagesCasoRegistroCurso UMLEel DdeNo ratings yet
- BizHub C452, C552, C652 Security Function Service ManualDocument45 pagesBizHub C452, C552, C652 Security Function Service ManualMCI WORLD MAKASSARNo ratings yet
- WS3620-LED Coor Const LAMP - WinsemiDocument7 pagesWS3620-LED Coor Const LAMP - WinsemivmsaNo ratings yet
- Amc 12B 2019Document10 pagesAmc 12B 2019ayaaatschoolNo ratings yet
- Walaa Ismail Ibrahim Ismail: Career ObjectiveDocument4 pagesWalaa Ismail Ibrahim Ismail: Career ObjectiveAwad ElhashimyNo ratings yet
- FPGA IPUG 02054 1 2 APB Interconnect Module Propel BuilderDocument19 pagesFPGA IPUG 02054 1 2 APB Interconnect Module Propel Builderravi dasNo ratings yet
- Acuvim II Profibus Modules Users Manual v1.10Document36 pagesAcuvim II Profibus Modules Users Manual v1.10kamran719No ratings yet
- ABM-12-GROUP-1-CHAPTER-4-and-5 UPDATEDDocument14 pagesABM-12-GROUP-1-CHAPTER-4-and-5 UPDATEDEiszel CadacioNo ratings yet
- Ooad QBDocument26 pagesOoad QBpshanthi23No ratings yet
- How To Set Up Active CrossoversDocument2 pagesHow To Set Up Active Crossoversgotti45No ratings yet
- Gis Project Management Approach For Implementation of Gis For Planning OrganizationsDocument34 pagesGis Project Management Approach For Implementation of Gis For Planning OrganizationsHaitham ElwanyNo ratings yet