Download as pdf or txt
You might also like
- Space and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Document474 pagesSpace and Spatialization in Contemporary Music History and Analysis Ideas and Implementations.Verónica E. Flores100% (3)
- Verilog Code For PLLDocument4 pagesVerilog Code For PLLvenkatraman1983No ratings yet
- Lab DSPDocument82 pagesLab DSPMohanad AdnanNo ratings yet
- Microprocessor and Microcontroller by B Ram PDFDocument2 pagesMicroprocessor and Microcontroller by B Ram PDFPrashant Kumar0% (3)
- Ezwave UrDocument738 pagesEzwave Urshakespirit100% (1)
- Information System Chapter 1 ThesisDocument22 pagesInformation System Chapter 1 ThesisMaoWatanabe77% (30)
- ALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFDocument4 pagesALD Additive Manufacturing VIGA-EIGA Broschure-1 PDFVenkateswaran KrishnamurthyNo ratings yet
- TFS Branching Guide - Scenarios 2.0Document20 pagesTFS Branching Guide - Scenarios 2.0pradeepku.b100% (1)
- RF Analog Impairments Modeling for Communication Systems Simulation: Application to OFDM-based TransceiversFrom EverandRF Analog Impairments Modeling for Communication Systems Simulation: Application to OFDM-based TransceiversNo ratings yet
- Design and Implementation of 2 Bits BCH Error Correcting Codes Using FPGADocument7 pagesDesign and Implementation of 2 Bits BCH Error Correcting Codes Using FPGAJournal of TelecommunicationsNo ratings yet
- Behavioral Modeling of PLL Using Verilog-ADocument3 pagesBehavioral Modeling of PLL Using Verilog-Auam22No ratings yet
- Butler MatrixDocument32 pagesButler MatrixamgadadelNo ratings yet
- HSPICE® RF User Guide: Version Y-2006.03-SP1, June 2006Document376 pagesHSPICE® RF User Guide: Version Y-2006.03-SP1, June 2006Sumanth BabuNo ratings yet
- VHDL Implementation of A Mips-32 Pipeline ProcessorDocument5 pagesVHDL Implementation of A Mips-32 Pipeline Processorfatima kishwar abidNo ratings yet
- Designing Dynamic Circuit Response, Volume 2 - Analog Circuit Design Series (PDFDrive)Document215 pagesDesigning Dynamic Circuit Response, Volume 2 - Analog Circuit Design Series (PDFDrive)Zaq 123No ratings yet
- Fpga DSP WhitepaperDocument15 pagesFpga DSP Whitepaperzohair_r66No ratings yet
- 7.performance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 CompressorDocument38 pages7.performance Analysis of Wallace Tree Multiplier With Kogge Stone Adder Using 15-4 Compressoranil kumarNo ratings yet
- 957 4 1 A 57607 ECAD VLSI Lab Manual PDFDocument151 pages957 4 1 A 57607 ECAD VLSI Lab Manual PDFBasava RajuNo ratings yet
- Eetop - CN MMIC DesignDocument207 pagesEetop - CN MMIC DesignA Mohan BabuNo ratings yet
- Communication System in ONGCDocument91 pagesCommunication System in ONGCKeerthiPratheek Reddy0% (1)
- 1st Interview Questions-QualcommDocument1 page1st Interview Questions-QualcommSandya VemuriNo ratings yet
- Emc Design FundamentalsDocument285 pagesEmc Design FundamentalsnekuNo ratings yet
- SpectreRF Mixer MMSIM141Document117 pagesSpectreRF Mixer MMSIM141hesan621esNo ratings yet
- PAM Multiplexers ReportingDocument20 pagesPAM Multiplexers ReportingJaed Caraig100% (1)
- Basic Embedded System Design Tutorial PDFDocument204 pagesBasic Embedded System Design Tutorial PDFsantoshmphilNo ratings yet
- Application of ADSP 21XXDocument14 pagesApplication of ADSP 21XXTanisha Shashikumar0% (1)
- DSP Lab Sample Viva QuestionsDocument7 pagesDSP Lab Sample Viva QuestionsNikoBellicNo ratings yet
- Pulse Code ModulationDocument11 pagesPulse Code ModulationMaryam ShahNo ratings yet
- Tiva C Series LaunchPadDocument13 pagesTiva C Series LaunchPadVivek ShrigiriNo ratings yet
- Ads RF Design Training PDFDocument4 pagesAds RF Design Training PDFshweta_chavan2872No ratings yet
- Design of Charge Pump PLLDocument5 pagesDesign of Charge Pump PLLSwati KashtNo ratings yet
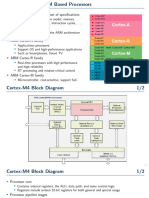
- ARM CORTEX M4 Memory LayoutDocument11 pagesARM CORTEX M4 Memory LayoutGurram KishoreNo ratings yet
- D.S.P/MATLAB Theory & ExperimentsDocument57 pagesD.S.P/MATLAB Theory & ExperimentsNandagopal Sivakumar50% (4)
- All Digital Phase Locked Loop Design and ImplementationDocument4 pagesAll Digital Phase Locked Loop Design and ImplementationAnton SaitovNo ratings yet
- Design and Implementation of Combinational Circuits Using Reversible Logic On FPGA SPARTAN 3EDocument6 pagesDesign and Implementation of Combinational Circuits Using Reversible Logic On FPGA SPARTAN 3Evarsha muthyalaNo ratings yet
- Ee 215 ADocument8 pagesEe 215 AArjun Singhal100% (1)
- Hspice TutorialDocument22 pagesHspice Tutorialjk556100% (1)
- Hardware-Software CodesignDocument26 pagesHardware-Software CodesignpoojaNo ratings yet
- FPGA Training: by Ushasri Merugu 21 Dec 2012Document5 pagesFPGA Training: by Ushasri Merugu 21 Dec 2012rkguptha_514369372No ratings yet
- VLSI Lab ManualDocument83 pagesVLSI Lab ManualSri SandhiyaNo ratings yet
- Advanced Communication Lab Manual: Visvesvaraya Technological UniversityDocument46 pagesAdvanced Communication Lab Manual: Visvesvaraya Technological UniversityPunith Gowda M B100% (2)
- Error Coding Reed SolomonDocument28 pagesError Coding Reed SolomonAnumNo ratings yet
- ASK Multisim SimulationDocument2 pagesASK Multisim SimulationDhea Ayu AnggrainiNo ratings yet
- Pedroni VHDL 2ed Exercise Solutions v4 PDFDocument37 pagesPedroni VHDL 2ed Exercise Solutions v4 PDFana eht50% (2)
- Digital Signal Processing Lab MannualDocument37 pagesDigital Signal Processing Lab Mannualsreenathreddy100% (4)
- Design and Implementation of UartDocument21 pagesDesign and Implementation of Uartbhanu455No ratings yet
- Simulazioni RF With LTSpiceDocument38 pagesSimulazioni RF With LTSpiceCarloNo ratings yet
- Two Stage CMOS Op Amp - Seid PDFDocument79 pagesTwo Stage CMOS Op Amp - Seid PDFTayachew BerhanNo ratings yet
- Wearable Oscilloscope Smart WatchDocument2 pagesWearable Oscilloscope Smart Watchالمخترع الصغير2100% (1)
- DSP Processor FundementalsDocument210 pagesDSP Processor FundementalsHaluk Özduman100% (3)
- Realization of Embedded Speech Recognmition Module Based On STM32Document5 pagesRealization of Embedded Speech Recognmition Module Based On STM32German Dario BuitragoNo ratings yet
- Flip Flop Mealy and Moore ModelDocument25 pagesFlip Flop Mealy and Moore Modelsurajpb1989100% (1)
- Vlsi Mtech Jntu Kakinada SyllabusDocument11 pagesVlsi Mtech Jntu Kakinada Syllabusaditya414No ratings yet
- Ibis Switch ModelingDocument122 pagesIbis Switch ModelingteomondoNo ratings yet
- High Efficiency RF and Microwave Solid State Power AmplifiersFrom EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersRating: 3 out of 5 stars3/5 (2)
- Digital Design of Signal Processing Systems: A Practical ApproachFrom EverandDigital Design of Signal Processing Systems: A Practical ApproachRating: 5 out of 5 stars5/5 (1)
- Multicore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCFrom EverandMulticore DSP: From Algorithms to Real-time Implementation on the TMS320C66x SoCNo ratings yet
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeFrom EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiNo ratings yet
- Cơ Sở Toán Học Cho Mật Mã - Huỳnh Trọng ThưaDocument34 pagesCơ Sở Toán Học Cho Mật Mã - Huỳnh Trọng ThưaHồng HuyNo ratings yet
- Passing Select-Options To Smart Forms: by VenkatDocument43 pagesPassing Select-Options To Smart Forms: by VenkatsudhakpNo ratings yet
- What Is The First Law of Thermodynamics - Laws of Thermodynamics - Thermodynamics - Physics - Khan AcademyDocument9 pagesWhat Is The First Law of Thermodynamics - Laws of Thermodynamics - Thermodynamics - Physics - Khan AcademyAbouFatehNo ratings yet
- PREFACE of Operating SystemsDocument4 pagesPREFACE of Operating SystemsAMIT RADHA KRISHNA NIGAMNo ratings yet
- Characterization and Evaluation of Portuguese Opuntia Spp. GermplasmDocument176 pagesCharacterization and Evaluation of Portuguese Opuntia Spp. GermplasmcarlosmgreisNo ratings yet
- Podar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Document3 pagesPodar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Shriniwas KulkarniNo ratings yet
- Q SolvedDocument4 pagesQ SolvedAkhilvjohnNo ratings yet
- Introduction To Computer AnimationDocument22 pagesIntroduction To Computer Animationsanu222No ratings yet
- FORM ReliabilityDocument2 pagesFORM ReliabilityLukusa BadimuenaNo ratings yet
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- Hvac For ArchicadDocument46 pagesHvac For ArchicadAlejandroRosasNo ratings yet
- Answers Chapter 8 (Structured Questions)Document10 pagesAnswers Chapter 8 (Structured Questions)Kavi Vitya100% (1)
- E175 Apu Ipad Dec 2020Document39 pagesE175 Apu Ipad Dec 2020Kevin PlunkettNo ratings yet
- Manual EPC Series v1.23Document65 pagesManual EPC Series v1.23JaimeDucal CessaNo ratings yet
- (Code) ACI 349.2R-97 Embedment Design Examples (ACI, 1997)Document26 pages(Code) ACI 349.2R-97 Embedment Design Examples (ACI, 1997)sungwgNo ratings yet
- Properties of Moist AirDocument11 pagesProperties of Moist AirKarthik HarithNo ratings yet
- Economic SectionsDocument13 pagesEconomic SectionsArvin NaborNo ratings yet
- Difference Between Process and ThreadDocument3 pagesDifference Between Process and ThreadsaddamjamaliNo ratings yet
- BD 535Document5 pagesBD 535cagliaripescaNo ratings yet
- Class XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDocument77 pagesClass XII Chemistry Important Questions and Common Errors Chapter 1 Solid State 1. Types of Packing Square Close PackingDeepak SinghNo ratings yet
- Waves: Laq'S (8 Marks)Document9 pagesWaves: Laq'S (8 Marks)Mohd ShahbazNo ratings yet
- Availability Based TariffDocument2 pagesAvailability Based TariffVijaya KumarNo ratings yet
- Hora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaDocument19 pagesHora (Wealth) Chaturthamsha (Destiny) : Ranjeeta RanjeetaUtpal KumarNo ratings yet
- WorksheetWorks Magic Squares Decimals 2 PDFDocument2 pagesWorksheetWorks Magic Squares Decimals 2 PDFPerez Zarate Gabriel MarianoNo ratings yet
- Power Topologies HandbookDocument199 pagesPower Topologies HandbookCarlos OrtegaNo ratings yet
- Ficha-Ingl-4to. A-B - Semana 3Document3 pagesFicha-Ingl-4to. A-B - Semana 3wilder chiroqueNo ratings yet