
On Choosing Parameters in Retrospective-Approximation Algorithms For Stochastic Root Finding and Simulation Optimization
On Choosing Parameters in Retrospective-Approximation Algorithms For Stochastic Root Finding and Simulation Optimization
You might also like
- Misinterpretation of TasawwufDocument260 pagesMisinterpretation of TasawwufSpirituality Should Be LivedNo ratings yet
- Experiment 8: Fixed and Fluidized BedDocument6 pagesExperiment 8: Fixed and Fluidized BedTuğbaNo ratings yet
- Pull Up EbookDocument12 pagesPull Up EbookDanko Kovačević100% (2)
- An Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFDocument23 pagesAn Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFAntonio Carlos RodriguesNo ratings yet
- SPE 164824 An Adaptive Evolutionary Algorithm For History-MatchingDocument13 pagesSPE 164824 An Adaptive Evolutionary Algorithm For History-MatchingAditya FauzanNo ratings yet
- System Reliability Analysis With Small Failure ProDocument17 pagesSystem Reliability Analysis With Small Failure Probikramjit debNo ratings yet
- 6.mass BalancingDocument36 pages6.mass BalancingRaul Dionicio100% (1)
- 1 s2.0 S0377221714005992 MainDocument12 pages1 s2.0 S0377221714005992 MaincengizNo ratings yet
- Multiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)Document15 pagesMultiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)wsjuangNo ratings yet
- Development of A Variance Prioritized Multiresponse Robust Design Framework For Quality ImprovementDocument17 pagesDevelopment of A Variance Prioritized Multiresponse Robust Design Framework For Quality Improvementaqeel shoukatNo ratings yet
- SSRN Id22337955421Document12 pagesSSRN Id22337955421Naveed KhalidNo ratings yet
- 2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipDocument33 pages2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipEthemNo ratings yet
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroNo ratings yet
- 02 Efficient Characterization of The Random Eigenvalue Problem inDocument19 pages02 Efficient Characterization of The Random Eigenvalue Problem inJRNo ratings yet
- Mathematical Programming For Piecewise Linear Regression AnalysisDocument43 pagesMathematical Programming For Piecewise Linear Regression AnalysishongxinNo ratings yet
- Issues and Procedures in Adopting Structural Equation Modelling TDocument9 pagesIssues and Procedures in Adopting Structural Equation Modelling TShwetha GyNo ratings yet
- 3 Theoretical Framework For Comparing Several Stochastic Optimization ApproachesDocument2 pages3 Theoretical Framework For Comparing Several Stochastic Optimization ApproachessjoerdNo ratings yet
- Delac 01Document6 pagesDelac 01Sayantan ChakrabortyNo ratings yet
- Analysis, and Result InterpretationDocument6 pagesAnalysis, and Result InterpretationDainikMitraNo ratings yet
- Optimal Sample Size Selection For Torusity Estimation Using A PSO Based Neural NetworkDocument14 pagesOptimal Sample Size Selection For Torusity Estimation Using A PSO Based Neural NetworkSiwaporn KunnapapdeelertNo ratings yet
- Literature Review On Response Surface MethodologyDocument4 pagesLiterature Review On Response Surface Methodologyea6mkqw2No ratings yet
- Least SquareDocument25 pagesLeast SquareNetra Bahadur KatuwalNo ratings yet
- Mixture of Partial Least Squares Regression ModelsDocument13 pagesMixture of Partial Least Squares Regression ModelsalexeletricaNo ratings yet
- Multi-Reservoir Operation Rules Multi-SwDocument21 pagesMulti-Reservoir Operation Rules Multi-SwdjajadjajaNo ratings yet
- On Random Sampling Over JoinsDocument12 pagesOn Random Sampling Over JoinsStavrosNo ratings yet
- 2014 Article 6684Document11 pages2014 Article 6684Mohammed BenbrahimNo ratings yet
- Time Series RDocument14 pagesTime Series RVarunKatyalNo ratings yet
- Meta-Heuristics AlgorithmsDocument13 pagesMeta-Heuristics AlgorithmsANH NGUYỄN TRẦN THẾNo ratings yet
- J.D. Opdyke - Permutation Tests (And Sampling Without Replacement) Orders of Magnitude Faster Using SAS - ScribeDocument40 pagesJ.D. Opdyke - Permutation Tests (And Sampling Without Replacement) Orders of Magnitude Faster Using SAS - ScribejdopdykeNo ratings yet
- 1 s2.0 S0266352X16300143 MainDocument10 pages1 s2.0 S0266352X16300143 Maina4abhirawatNo ratings yet
- Research Paper Using Linear RegressionDocument5 pagesResearch Paper Using Linear Regressionh02rj3ek100% (1)
- Bootstrapping and Learning PDFA in Data Streams: JMLR: Workshop and Conference Proceedings 21: - , 2012 The 11th ICGIDocument15 pagesBootstrapping and Learning PDFA in Data Streams: JMLR: Workshop and Conference Proceedings 21: - , 2012 The 11th ICGIKevin MondragonNo ratings yet
- First Order SchedulingDocument45 pagesFirst Order SchedulingChris VerveridisNo ratings yet
- Robust Characterization of Naturally Fractured Carbonate Reservoirs Through Sensitivity Analysis and Noise Propa...Document18 pagesRobust Characterization of Naturally Fractured Carbonate Reservoirs Through Sensitivity Analysis and Noise Propa...Louis DoroteoNo ratings yet
- Topology and Geometry in Machine Learning For Logistic Regression ProblemsDocument30 pagesTopology and Geometry in Machine Learning For Logistic Regression ProblemssggtioNo ratings yet
- S, Anno LXIII, N. 2, 2003: TatisticaDocument22 pagesS, Anno LXIII, N. 2, 2003: TatisticaAbhraneilMeitBhattacharyaNo ratings yet
- A Review of Surrogate Assisted Multiobjective EADocument15 pagesA Review of Surrogate Assisted Multiobjective EASreya BanerjeeNo ratings yet
- From Explanations To Feature Selection: Assessing SHAP Values As Feature Selection MechanismDocument8 pagesFrom Explanations To Feature Selection: Assessing SHAP Values As Feature Selection MechanismasdsafdsNo ratings yet
- AIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryDocument15 pagesAIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryRomoex R RockNo ratings yet
- General-To-Specific Modeling in Stata: 14, Number 4, Pp. 895-908Document14 pagesGeneral-To-Specific Modeling in Stata: 14, Number 4, Pp. 895-908Abdou SoumahNo ratings yet
- Ijaiem 2014 05 20 056Document11 pagesIjaiem 2014 05 20 056International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Size and Shape Optimization of Truss STRDocument15 pagesSize and Shape Optimization of Truss STRalexander sebastian diazNo ratings yet
- Model Updating Using Genetic Algorithms With Sequential Niche TechniqueDocument17 pagesModel Updating Using Genetic Algorithms With Sequential Niche TechniqueShruti SharmaNo ratings yet
- An Overview of Software For Conducting Dimensionality Assessmentent in Multidiomensional ModelsDocument11 pagesAn Overview of Software For Conducting Dimensionality Assessmentent in Multidiomensional ModelsPaola PorrasNo ratings yet
- (Methods in Molecular Biology, 2231) Kazutaka Katoh - Multiple Sequence Alignment - Methods and Protocols-Humana (2020)Document322 pages(Methods in Molecular Biology, 2231) Kazutaka Katoh - Multiple Sequence Alignment - Methods and Protocols-Humana (2020)Diego AlmeidaNo ratings yet
- Adaptive TimeDomainDocument29 pagesAdaptive TimeDomainJimmy PhoenixNo ratings yet
- A Hybrid Approach To Parameter Tuning in Genetic Algorithms: Bo Yuan Marcus GallagherDocument8 pagesA Hybrid Approach To Parameter Tuning in Genetic Algorithms: Bo Yuan Marcus GallagherPraveen Kumar ArjalaNo ratings yet
- Kernels, Model Selection and Feature SelectionDocument5 pagesKernels, Model Selection and Feature SelectionGautam VashishtNo ratings yet
- Applications of Simulations in Social ResearchDocument3 pagesApplications of Simulations in Social ResearchPio FabbriNo ratings yet
- Engineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimDocument9 pagesEngineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimEduardo PutzNo ratings yet
- RrcovDocument49 pagesRrcovtristaloidNo ratings yet
- BuildingPredictiveModelsR CaretDocument26 pagesBuildingPredictiveModelsR CaretCliqueLearn E-LearningNo ratings yet
- Li 2019Document28 pagesLi 2019Jocilene Dantas Torres NascimentoNo ratings yet
- Optimal Model Selection by A Genetic Algorithm Using SAS®: Jerry S. Tsai, Clintuition, Los Angeles, CADocument13 pagesOptimal Model Selection by A Genetic Algorithm Using SAS®: Jerry S. Tsai, Clintuition, Los Angeles, CAFritzNo ratings yet
- When To Use and How To Report The Results of PLS-SEM: Joseph F. HairDocument23 pagesWhen To Use and How To Report The Results of PLS-SEM: Joseph F. HairSaifuddin HaswareNo ratings yet
- PLS-SEM Results Reporting FormatDocument46 pagesPLS-SEM Results Reporting FormatMohiuddin QureshiNo ratings yet
- Fitting Nonlinear Calibration Curves No Models PerDocument17 pagesFitting Nonlinear Calibration Curves No Models PerLuis LahuertaNo ratings yet
- Optimization Under Stochastic Uncertainty: Methods, Control and Random Search MethodsFrom EverandOptimization Under Stochastic Uncertainty: Methods, Control and Random Search MethodsNo ratings yet
- Process Performance Models: Statistical, Probabilistic & SimulationFrom EverandProcess Performance Models: Statistical, Probabilistic & SimulationNo ratings yet
- Assessing and Improving Prediction and Classification: Theory and Algorithms in C++From EverandAssessing and Improving Prediction and Classification: Theory and Algorithms in C++No ratings yet
- Casting MetallurgyDocument16 pagesCasting MetallurgyVijay KumarNo ratings yet
- On The Knowledge and Experience of ProgrammerDocument21 pagesOn The Knowledge and Experience of ProgrammerVijay KumarNo ratings yet
- Product Design - BasicsDocument18 pagesProduct Design - BasicsVijay KumarNo ratings yet
- Automated InspectionDocument31 pagesAutomated InspectionVijay Kumar100% (8)
- Flexible Manufacturing SystemsDocument18 pagesFlexible Manufacturing SystemsVijay Kumar100% (1)
- Pressure Vessels PDFDocument19 pagesPressure Vessels PDFArnaldo BenitezNo ratings yet
- Government of Andhra Pradesh A.P. Teacher Eligibility Test - July 2011Document3 pagesGovernment of Andhra Pradesh A.P. Teacher Eligibility Test - July 2011Vijay KumarNo ratings yet
- FMEDA E3 ModulevelDocument21 pagesFMEDA E3 ModulevelRonny AjaNo ratings yet
- Lightnng Protection As Per IEC 62305Document40 pagesLightnng Protection As Per IEC 62305Mahesh Chandra Manav100% (1)
- Tc1057-Eng-10004 0 002 PDFDocument507 pagesTc1057-Eng-10004 0 002 PDFKenaia AdeleyeNo ratings yet
- MPD and MPK Series Midi Io Details 02Document3 pagesMPD and MPK Series Midi Io Details 02Jorge David Monroy PerezNo ratings yet
- Narrative Text - Infografis - KurmerDocument2 pagesNarrative Text - Infografis - KurmerCitra Arba RojunaNo ratings yet
- Valve SelectionDocument5 pagesValve SelectionmansurNo ratings yet
- 6 Biomechanical Basis of Extraction Space Closure - Pocket DentistryDocument5 pages6 Biomechanical Basis of Extraction Space Closure - Pocket DentistryParameswaran ManiNo ratings yet
- Gateway To Art - 1.08Document40 pagesGateway To Art - 1.08i am bubbleNo ratings yet
- Atlas FiltriDocument18 pagesAtlas FiltriCristi CicireanNo ratings yet
- Confucianism: By: Alisha, Mandy, Michael, and PreshiaDocument15 pagesConfucianism: By: Alisha, Mandy, Michael, and PreshiaAvi Auerbach AvilaNo ratings yet
- Buttermilk Pancakes and Honey Roasted Figs Recipe HelloFreshDocument1 pageButtermilk Pancakes and Honey Roasted Figs Recipe HelloFreshxarogi1776No ratings yet
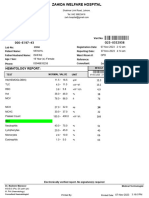
- Hematology Report:: MRN: Visit NoDocument1 pageHematology Report:: MRN: Visit Nojuniadsheikh6No ratings yet
- Fish JordanDocument29 pagesFish JordanSarah SobhiNo ratings yet
- Product Range: Trelleborg Se Aling SolutionsDocument39 pagesProduct Range: Trelleborg Se Aling SolutionssandeepNo ratings yet
- DLL Science 9 JulyDocument10 pagesDLL Science 9 JulyMark Kiven MartinezNo ratings yet
- To Study Well Design Aspects in HPHT EnvironmentDocument40 pagesTo Study Well Design Aspects in HPHT Environmentnikhil_barshettiwat100% (1)
- Hotpoint Washing Machine Wmf740Document16 pagesHotpoint Washing Machine Wmf740furheavensakeNo ratings yet
- MSD Numbers 0410612020 Am: ClosingDocument11 pagesMSD Numbers 0410612020 Am: ClosingSanjeev JayaratnaNo ratings yet
- 20 Types of Pasta - TLE9Document2 pages20 Types of Pasta - TLE9Chloe RaniaNo ratings yet
- Manual Romi GL 240Document170 pagesManual Romi GL 240FlavioJS10No ratings yet
- Verb Patterns: Verb + Infinitive or Verb + - Ing?: Verbs Followed by A To-InfinitiveDocument5 pagesVerb Patterns: Verb + Infinitive or Verb + - Ing?: Verbs Followed by A To-InfinitiveTeodora PluskoskaNo ratings yet
- Manual Spare Parts DB540!72!07Document124 pagesManual Spare Parts DB540!72!07Gustavo CarvalhoNo ratings yet
- Dawson A J.design of Inland Wat.1950.TRANSDocument26 pagesDawson A J.design of Inland Wat.1950.TRANSKelvin XuNo ratings yet
- Lesson 02 PDFDocument13 pagesLesson 02 PDFJeremy TohNo ratings yet
- 31-SDMS-03 Low Voltage Cabinet For. Pole Mounted Transformer PDFDocument20 pages31-SDMS-03 Low Voltage Cabinet For. Pole Mounted Transformer PDFMehdi SalahNo ratings yet
- Tech Mahindra Antonyms and QuestionsDocument27 pagesTech Mahindra Antonyms and QuestionsNehaNo ratings yet
- Physics ProjectDocument8 pagesPhysics Projectmitra28shyamalNo ratings yet
































































































Download as pdf or txt
You might also like
- Misinterpretation of TasawwufDocument260 pagesMisinterpretation of TasawwufSpirituality Should Be LivedNo ratings yet
- Experiment 8: Fixed and Fluidized BedDocument6 pagesExperiment 8: Fixed and Fluidized BedTuğbaNo ratings yet
- Pull Up EbookDocument12 pagesPull Up EbookDanko Kovačević100% (2)
- An Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFDocument23 pagesAn Enhanced Sample Average Approximation Method For Stochastic Optimization - 2016 - International Journal of Production Economics PDFAntonio Carlos RodriguesNo ratings yet
- SPE 164824 An Adaptive Evolutionary Algorithm For History-MatchingDocument13 pagesSPE 164824 An Adaptive Evolutionary Algorithm For History-MatchingAditya FauzanNo ratings yet
- System Reliability Analysis With Small Failure ProDocument17 pagesSystem Reliability Analysis With Small Failure Probikramjit debNo ratings yet
- 6.mass BalancingDocument36 pages6.mass BalancingRaul Dionicio100% (1)
- 1 s2.0 S0377221714005992 MainDocument12 pages1 s2.0 S0377221714005992 MaincengizNo ratings yet
- Multiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)Document15 pagesMultiple Sequence Alignment Using Modified Dynamic Programming and Particle Swarm Optimization (Journal of The Chinese Institute of Engineers)wsjuangNo ratings yet
- Development of A Variance Prioritized Multiresponse Robust Design Framework For Quality ImprovementDocument17 pagesDevelopment of A Variance Prioritized Multiresponse Robust Design Framework For Quality Improvementaqeel shoukatNo ratings yet
- SSRN Id22337955421Document12 pagesSSRN Id22337955421Naveed KhalidNo ratings yet
- 2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipDocument33 pages2016 - A Novel Evolutionary Algorithm Applied To Algebraic Modifications of The RANS Stress-Strain RelationshipEthemNo ratings yet
- Modal Assurance CriterionDocument8 pagesModal Assurance CriterionAndres CaroNo ratings yet
- 02 Efficient Characterization of The Random Eigenvalue Problem inDocument19 pages02 Efficient Characterization of The Random Eigenvalue Problem inJRNo ratings yet
- Mathematical Programming For Piecewise Linear Regression AnalysisDocument43 pagesMathematical Programming For Piecewise Linear Regression AnalysishongxinNo ratings yet
- Issues and Procedures in Adopting Structural Equation Modelling TDocument9 pagesIssues and Procedures in Adopting Structural Equation Modelling TShwetha GyNo ratings yet
- 3 Theoretical Framework For Comparing Several Stochastic Optimization ApproachesDocument2 pages3 Theoretical Framework For Comparing Several Stochastic Optimization ApproachessjoerdNo ratings yet
- Delac 01Document6 pagesDelac 01Sayantan ChakrabortyNo ratings yet
- Analysis, and Result InterpretationDocument6 pagesAnalysis, and Result InterpretationDainikMitraNo ratings yet
- Optimal Sample Size Selection For Torusity Estimation Using A PSO Based Neural NetworkDocument14 pagesOptimal Sample Size Selection For Torusity Estimation Using A PSO Based Neural NetworkSiwaporn KunnapapdeelertNo ratings yet
- Literature Review On Response Surface MethodologyDocument4 pagesLiterature Review On Response Surface Methodologyea6mkqw2No ratings yet
- Least SquareDocument25 pagesLeast SquareNetra Bahadur KatuwalNo ratings yet
- Mixture of Partial Least Squares Regression ModelsDocument13 pagesMixture of Partial Least Squares Regression ModelsalexeletricaNo ratings yet
- Multi-Reservoir Operation Rules Multi-SwDocument21 pagesMulti-Reservoir Operation Rules Multi-SwdjajadjajaNo ratings yet
- On Random Sampling Over JoinsDocument12 pagesOn Random Sampling Over JoinsStavrosNo ratings yet
- 2014 Article 6684Document11 pages2014 Article 6684Mohammed BenbrahimNo ratings yet
- Time Series RDocument14 pagesTime Series RVarunKatyalNo ratings yet
- Meta-Heuristics AlgorithmsDocument13 pagesMeta-Heuristics AlgorithmsANH NGUYỄN TRẦN THẾNo ratings yet
- J.D. Opdyke - Permutation Tests (And Sampling Without Replacement) Orders of Magnitude Faster Using SAS - ScribeDocument40 pagesJ.D. Opdyke - Permutation Tests (And Sampling Without Replacement) Orders of Magnitude Faster Using SAS - ScribejdopdykeNo ratings yet
- 1 s2.0 S0266352X16300143 MainDocument10 pages1 s2.0 S0266352X16300143 Maina4abhirawatNo ratings yet
- Research Paper Using Linear RegressionDocument5 pagesResearch Paper Using Linear Regressionh02rj3ek100% (1)
- Bootstrapping and Learning PDFA in Data Streams: JMLR: Workshop and Conference Proceedings 21: - , 2012 The 11th ICGIDocument15 pagesBootstrapping and Learning PDFA in Data Streams: JMLR: Workshop and Conference Proceedings 21: - , 2012 The 11th ICGIKevin MondragonNo ratings yet
- First Order SchedulingDocument45 pagesFirst Order SchedulingChris VerveridisNo ratings yet
- Robust Characterization of Naturally Fractured Carbonate Reservoirs Through Sensitivity Analysis and Noise Propa...Document18 pagesRobust Characterization of Naturally Fractured Carbonate Reservoirs Through Sensitivity Analysis and Noise Propa...Louis DoroteoNo ratings yet
- Topology and Geometry in Machine Learning For Logistic Regression ProblemsDocument30 pagesTopology and Geometry in Machine Learning For Logistic Regression ProblemssggtioNo ratings yet
- S, Anno LXIII, N. 2, 2003: TatisticaDocument22 pagesS, Anno LXIII, N. 2, 2003: TatisticaAbhraneilMeitBhattacharyaNo ratings yet
- A Review of Surrogate Assisted Multiobjective EADocument15 pagesA Review of Surrogate Assisted Multiobjective EASreya BanerjeeNo ratings yet
- From Explanations To Feature Selection: Assessing SHAP Values As Feature Selection MechanismDocument8 pagesFrom Explanations To Feature Selection: Assessing SHAP Values As Feature Selection MechanismasdsafdsNo ratings yet
- AIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryDocument15 pagesAIAA-2000-1437 Validation of Structural Dynamics Models at Los Alamos National LaboratoryRomoex R RockNo ratings yet
- General-To-Specific Modeling in Stata: 14, Number 4, Pp. 895-908Document14 pagesGeneral-To-Specific Modeling in Stata: 14, Number 4, Pp. 895-908Abdou SoumahNo ratings yet
- Ijaiem 2014 05 20 056Document11 pagesIjaiem 2014 05 20 056International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Size and Shape Optimization of Truss STRDocument15 pagesSize and Shape Optimization of Truss STRalexander sebastian diazNo ratings yet
- Model Updating Using Genetic Algorithms With Sequential Niche TechniqueDocument17 pagesModel Updating Using Genetic Algorithms With Sequential Niche TechniqueShruti SharmaNo ratings yet
- An Overview of Software For Conducting Dimensionality Assessmentent in Multidiomensional ModelsDocument11 pagesAn Overview of Software For Conducting Dimensionality Assessmentent in Multidiomensional ModelsPaola PorrasNo ratings yet
- (Methods in Molecular Biology, 2231) Kazutaka Katoh - Multiple Sequence Alignment - Methods and Protocols-Humana (2020)Document322 pages(Methods in Molecular Biology, 2231) Kazutaka Katoh - Multiple Sequence Alignment - Methods and Protocols-Humana (2020)Diego AlmeidaNo ratings yet
- Adaptive TimeDomainDocument29 pagesAdaptive TimeDomainJimmy PhoenixNo ratings yet
- A Hybrid Approach To Parameter Tuning in Genetic Algorithms: Bo Yuan Marcus GallagherDocument8 pagesA Hybrid Approach To Parameter Tuning in Genetic Algorithms: Bo Yuan Marcus GallagherPraveen Kumar ArjalaNo ratings yet
- Kernels, Model Selection and Feature SelectionDocument5 pagesKernels, Model Selection and Feature SelectionGautam VashishtNo ratings yet
- Applications of Simulations in Social ResearchDocument3 pagesApplications of Simulations in Social ResearchPio FabbriNo ratings yet
- Engineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimDocument9 pagesEngineering Applications of Arti Ficial Intelligence: Zeineb Lassoued, Kamel AbderrahimEduardo PutzNo ratings yet
- RrcovDocument49 pagesRrcovtristaloidNo ratings yet
- BuildingPredictiveModelsR CaretDocument26 pagesBuildingPredictiveModelsR CaretCliqueLearn E-LearningNo ratings yet
- Li 2019Document28 pagesLi 2019Jocilene Dantas Torres NascimentoNo ratings yet
- Optimal Model Selection by A Genetic Algorithm Using SAS®: Jerry S. Tsai, Clintuition, Los Angeles, CADocument13 pagesOptimal Model Selection by A Genetic Algorithm Using SAS®: Jerry S. Tsai, Clintuition, Los Angeles, CAFritzNo ratings yet
- When To Use and How To Report The Results of PLS-SEM: Joseph F. HairDocument23 pagesWhen To Use and How To Report The Results of PLS-SEM: Joseph F. HairSaifuddin HaswareNo ratings yet
- PLS-SEM Results Reporting FormatDocument46 pagesPLS-SEM Results Reporting FormatMohiuddin QureshiNo ratings yet
- Fitting Nonlinear Calibration Curves No Models PerDocument17 pagesFitting Nonlinear Calibration Curves No Models PerLuis LahuertaNo ratings yet
- Optimization Under Stochastic Uncertainty: Methods, Control and Random Search MethodsFrom EverandOptimization Under Stochastic Uncertainty: Methods, Control and Random Search MethodsNo ratings yet
- Process Performance Models: Statistical, Probabilistic & SimulationFrom EverandProcess Performance Models: Statistical, Probabilistic & SimulationNo ratings yet
- Assessing and Improving Prediction and Classification: Theory and Algorithms in C++From EverandAssessing and Improving Prediction and Classification: Theory and Algorithms in C++No ratings yet
- Casting MetallurgyDocument16 pagesCasting MetallurgyVijay KumarNo ratings yet
- On The Knowledge and Experience of ProgrammerDocument21 pagesOn The Knowledge and Experience of ProgrammerVijay KumarNo ratings yet
- Product Design - BasicsDocument18 pagesProduct Design - BasicsVijay KumarNo ratings yet
- Automated InspectionDocument31 pagesAutomated InspectionVijay Kumar100% (8)
- Flexible Manufacturing SystemsDocument18 pagesFlexible Manufacturing SystemsVijay Kumar100% (1)
- Pressure Vessels PDFDocument19 pagesPressure Vessels PDFArnaldo BenitezNo ratings yet
- Government of Andhra Pradesh A.P. Teacher Eligibility Test - July 2011Document3 pagesGovernment of Andhra Pradesh A.P. Teacher Eligibility Test - July 2011Vijay KumarNo ratings yet
- FMEDA E3 ModulevelDocument21 pagesFMEDA E3 ModulevelRonny AjaNo ratings yet
- Lightnng Protection As Per IEC 62305Document40 pagesLightnng Protection As Per IEC 62305Mahesh Chandra Manav100% (1)
- Tc1057-Eng-10004 0 002 PDFDocument507 pagesTc1057-Eng-10004 0 002 PDFKenaia AdeleyeNo ratings yet
- MPD and MPK Series Midi Io Details 02Document3 pagesMPD and MPK Series Midi Io Details 02Jorge David Monroy PerezNo ratings yet
- Narrative Text - Infografis - KurmerDocument2 pagesNarrative Text - Infografis - KurmerCitra Arba RojunaNo ratings yet
- Valve SelectionDocument5 pagesValve SelectionmansurNo ratings yet
- 6 Biomechanical Basis of Extraction Space Closure - Pocket DentistryDocument5 pages6 Biomechanical Basis of Extraction Space Closure - Pocket DentistryParameswaran ManiNo ratings yet
- Gateway To Art - 1.08Document40 pagesGateway To Art - 1.08i am bubbleNo ratings yet
- Atlas FiltriDocument18 pagesAtlas FiltriCristi CicireanNo ratings yet
- Confucianism: By: Alisha, Mandy, Michael, and PreshiaDocument15 pagesConfucianism: By: Alisha, Mandy, Michael, and PreshiaAvi Auerbach AvilaNo ratings yet
- Buttermilk Pancakes and Honey Roasted Figs Recipe HelloFreshDocument1 pageButtermilk Pancakes and Honey Roasted Figs Recipe HelloFreshxarogi1776No ratings yet
- Hematology Report:: MRN: Visit NoDocument1 pageHematology Report:: MRN: Visit Nojuniadsheikh6No ratings yet
- Fish JordanDocument29 pagesFish JordanSarah SobhiNo ratings yet
- Product Range: Trelleborg Se Aling SolutionsDocument39 pagesProduct Range: Trelleborg Se Aling SolutionssandeepNo ratings yet
- DLL Science 9 JulyDocument10 pagesDLL Science 9 JulyMark Kiven MartinezNo ratings yet
- To Study Well Design Aspects in HPHT EnvironmentDocument40 pagesTo Study Well Design Aspects in HPHT Environmentnikhil_barshettiwat100% (1)
- Hotpoint Washing Machine Wmf740Document16 pagesHotpoint Washing Machine Wmf740furheavensakeNo ratings yet
- MSD Numbers 0410612020 Am: ClosingDocument11 pagesMSD Numbers 0410612020 Am: ClosingSanjeev JayaratnaNo ratings yet
- 20 Types of Pasta - TLE9Document2 pages20 Types of Pasta - TLE9Chloe RaniaNo ratings yet
- Manual Romi GL 240Document170 pagesManual Romi GL 240FlavioJS10No ratings yet
- Verb Patterns: Verb + Infinitive or Verb + - Ing?: Verbs Followed by A To-InfinitiveDocument5 pagesVerb Patterns: Verb + Infinitive or Verb + - Ing?: Verbs Followed by A To-InfinitiveTeodora PluskoskaNo ratings yet
- Manual Spare Parts DB540!72!07Document124 pagesManual Spare Parts DB540!72!07Gustavo CarvalhoNo ratings yet
- Dawson A J.design of Inland Wat.1950.TRANSDocument26 pagesDawson A J.design of Inland Wat.1950.TRANSKelvin XuNo ratings yet
- Lesson 02 PDFDocument13 pagesLesson 02 PDFJeremy TohNo ratings yet
- 31-SDMS-03 Low Voltage Cabinet For. Pole Mounted Transformer PDFDocument20 pages31-SDMS-03 Low Voltage Cabinet For. Pole Mounted Transformer PDFMehdi SalahNo ratings yet
- Tech Mahindra Antonyms and QuestionsDocument27 pagesTech Mahindra Antonyms and QuestionsNehaNo ratings yet
- Physics ProjectDocument8 pagesPhysics Projectmitra28shyamalNo ratings yet