Download as pdf or txt
You might also like
- LO4: Testing: Unit 18-Computer Systems HardwareDocument8 pagesLO4: Testing: Unit 18-Computer Systems Hardware20holmesloNo ratings yet
- 1989 Ford Truck Shop Manual Volume A Light Duty Truck Volume 1 of 2Document1,218 pages1989 Ford Truck Shop Manual Volume A Light Duty Truck Volume 1 of 2dave bond100% (9)
- NG - Argument Reduction For Huge Arguments: Good To The Last BitDocument8 pagesNG - Argument Reduction For Huge Arguments: Good To The Last BitDerek O'ConnorNo ratings yet
- Information Processing Theory Lesson PlanDocument3 pagesInformation Processing Theory Lesson Planapi-2663288610% (1)
- Design and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemDocument8 pagesDesign and Development of Optical Flow Based Moving Object Detection and Tracking (OMODT) SystemInternational Journal of computational Engineering research (IJCER)No ratings yet
- Final Project Report UAV Video Stabilization: CMPE264: Image Analysis and Computer VisionDocument11 pagesFinal Project Report UAV Video Stabilization: CMPE264: Image Analysis and Computer Visionmokhtariko1No ratings yet
- New Motion Estimation Algorithm Used in H.263+Document9 pagesNew Motion Estimation Algorithm Used in H.263+devaraj_tmNo ratings yet
- Application of A Cumulative Method For CDocument5 pagesApplication of A Cumulative Method For CwellflowcreativefirmNo ratings yet
- 3dof Arm Design MechanicsDocument6 pages3dof Arm Design Mechanicshashim khanNo ratings yet
- Implementation of An Edge Detection Algorithm Using FPGA Reconfigurable HardwareDocument20 pagesImplementation of An Edge Detection Algorithm Using FPGA Reconfigurable HardwareYogeshwar nath singhNo ratings yet
- Paper 11-Shape Prediction Linear Algorithm Using FuzzyDocument5 pagesPaper 11-Shape Prediction Linear Algorithm Using FuzzyEditor IJACSANo ratings yet
- Image Transmission in Wireless Sensor NetworksDocument6 pagesImage Transmission in Wireless Sensor NetworksInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Detection of Moving Object Based On Background SubtractionDocument4 pagesDetection of Moving Object Based On Background SubtractionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Icase: IIII11l11ll IllDocument26 pagesIcase: IIII11l11ll IllSk SharmaNo ratings yet
- Kinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulDocument6 pagesKinect-Based Obstacle Detection For Manipulator: Panjawee Rakprayoon, Miti Ruchanurucks, and Ada CoundoulCamilo Ernesto Pardo BeainyNo ratings yet
- Optical ComputingDocument24 pagesOptical ComputingNeha Mudit AgrawalNo ratings yet
- A 2589 Line Topology Optimization Code Written For The Graphics CardDocument20 pagesA 2589 Line Topology Optimization Code Written For The Graphics Cardgorot1No ratings yet
- Synthetic Aperture Radar (SAR) Imaging UsingGlobal Back Projection (GBP) Algorithm ForAirborne Radar SystemsDocument6 pagesSynthetic Aperture Radar (SAR) Imaging UsingGlobal Back Projection (GBP) Algorithm ForAirborne Radar SystemsAshish BhardwajNo ratings yet
- Implementing DSP Algorithms Using Spartan-3 FpgasDocument4 pagesImplementing DSP Algorithms Using Spartan-3 FpgasAkshat AgrawalNo ratings yet
- New Propagation Model Using Fast 3D Raytracing Application To WifiDocument8 pagesNew Propagation Model Using Fast 3D Raytracing Application To Wifijeffounet35No ratings yet
- International Refereed Journal of Engineering and Science (IRJES)Document8 pagesInternational Refereed Journal of Engineering and Science (IRJES)www.irjes.comNo ratings yet
- Documentation Batch 9Document14 pagesDocumentation Batch 9chaitu140No ratings yet
- Subpixel Edge Detection Based On Morphological Theory: Yu Lei and Nie JiafaDocument4 pagesSubpixel Edge Detection Based On Morphological Theory: Yu Lei and Nie JiafarphmiNo ratings yet
- Autonomous Vehicle Driving Using The Stream Based Realtime Hardware Line DetectorDocument4 pagesAutonomous Vehicle Driving Using The Stream Based Realtime Hardware Line DetectorLoi NgoNo ratings yet
- Reverse Engineering of A Symmetric Object: Minho Chang, Sang C. ParkDocument10 pagesReverse Engineering of A Symmetric Object: Minho Chang, Sang C. Parkivanlira04No ratings yet
- Fpga Design and Implementation of A Scan Conversion Graphical Sub-SystemDocument13 pagesFpga Design and Implementation of A Scan Conversion Graphical Sub-SystemNeam Al KhayatNo ratings yet
- Dspic Edge DetectionDocument6 pagesDspic Edge DetectionFabio ArnezNo ratings yet
- Vehicle Speed Measurement and Number Plate Detection UsingDocument10 pagesVehicle Speed Measurement and Number Plate Detection UsingM Yasir AnjumNo ratings yet
- Lecture - Line Scan ConversionDocument46 pagesLecture - Line Scan Conversionsumayya shaikNo ratings yet
- Paper On Booth SquarerDocument12 pagesPaper On Booth SquarerpskumarvlsipdNo ratings yet
- TSPpaper 243Document5 pagesTSPpaper 243Leonardo BritoNo ratings yet
- Particle Swarm Optimization-Based RBF Neural Network Load Forecasting ModelDocument4 pagesParticle Swarm Optimization-Based RBF Neural Network Load Forecasting Modelherokaboss1987No ratings yet
- Lightweight U-Net For Cloud Detection of Visible ADocument15 pagesLightweight U-Net For Cloud Detection of Visible AChris Morgan ShintaroNo ratings yet
- Multi-Threaded Computation of The Sobel Image Gradient On Intel Multi-Core Processors Using Openmp LibraryDocument14 pagesMulti-Threaded Computation of The Sobel Image Gradient On Intel Multi-Core Processors Using Openmp LibraryAnonymous Gl4IRRjzNNo ratings yet
- 1.6-2005 India 3rd IITKanpur-WebDocument16 pages1.6-2005 India 3rd IITKanpur-WebSuresh KumarNo ratings yet
- Image Processing by Digital Filter Using MatlabDocument7 pagesImage Processing by Digital Filter Using MatlabInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Towards A Reconfigurable Tracking SystemDocument27 pagesTowards A Reconfigurable Tracking SystemNazmul HaqueNo ratings yet
- Simulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesDocument5 pagesSimulink Design of Pipelined CORDIC For Generation of Sine and Cosine ValuesInternational Journal of computational Engineering research (IJCER)No ratings yet
- Adityo 2020 J. Phys. Conf. Ser. 1511 012074Document11 pagesAdityo 2020 J. Phys. Conf. Ser. 1511 012074HendratoNo ratings yet
- I Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7Document6 pagesI Nternational Journal of Computational Engineering Research (Ijceronline - Com) Vol. 2 Issue. 7International Journal of computational Engineering research (IJCER)No ratings yet
- FPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemDocument4 pagesFPGA Implementation of A Sequential Extended Kalman Filter Algorithm Applied To Mobile Robotics Localization ProblemXavier Martínez MoctezumaNo ratings yet
- Computer Graphic ReportDocument8 pagesComputer Graphic ReportAliNo ratings yet
- Thesis On Image Processing PDFDocument7 pagesThesis On Image Processing PDFmarilynmarieboston100% (2)
- Razali 2021 J. Phys. Conf. Ser. 1933 012055Document8 pagesRazali 2021 J. Phys. Conf. Ser. 1933 012055dinguemlemgoto francisNo ratings yet
- A High Efficient System For Traffic Mean Speed Estimation From MPEG Video (10.1109@AICI.2009.358)Document5 pagesA High Efficient System For Traffic Mean Speed Estimation From MPEG Video (10.1109@AICI.2009.358)YoungKimNo ratings yet
- Robust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriDocument6 pagesRobust Zero-Watermarking of Images Using Neural Network: Santosh Chapaneri Radhika ChapaneriSantosh ChapaneriNo ratings yet
- Sensors-Fpga ProjectDocument24 pagesSensors-Fpga ProjectangelinaNo ratings yet
- Computer Aided Spur Gear Data Extraction Based On Image Processing TechniqueDocument12 pagesComputer Aided Spur Gear Data Extraction Based On Image Processing TechniqueAli AbbarNo ratings yet
- The Data Acquisition and Processing Based On MEMS AccelerometerDocument8 pagesThe Data Acquisition and Processing Based On MEMS AccelerometerInternational Journal of Research in Engineering and ScienceNo ratings yet
- Gustavson 2022 NoiseDocument17 pagesGustavson 2022 NoisePedro SouzaNo ratings yet
- Dct-Domain Blind Measurement of Blocking Artifacts in Dct-Coded ImagesDocument4 pagesDct-Domain Blind Measurement of Blocking Artifacts in Dct-Coded Imagesjin11004No ratings yet
- Efficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsDocument8 pagesEfficient Implementation of A Pseudorandom Sequence Generator For High-Speed Data CommunicationsRekhaPadmanabhanNo ratings yet
- Performance Enhancement of Video Compression Algorithms With SIMDDocument80 pagesPerformance Enhancement of Video Compression Algorithms With SIMDCarlosNo ratings yet
- An Adaptive Codebook Model For Change Detection With Dynamic BackgroundDocument7 pagesAn Adaptive Codebook Model For Change Detection With Dynamic BackgroundMohit SinghNo ratings yet
- InTech-High Speed Architecure Based On Fpga For A Stereo Vision AlgorithmDocument18 pagesInTech-High Speed Architecure Based On Fpga For A Stereo Vision AlgorithmdvtruongsonNo ratings yet
- Ijecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)Document5 pagesIjecet: International Journal of Electronics and Communication Engineering & Technology (Ijecet)IAEME PublicationNo ratings yet
- Comparison of Rendering Processes On 3D ModelDocument10 pagesComparison of Rendering Processes On 3D ModelAnonymous Gl4IRRjzNNo ratings yet
- Need To ReadDocument14 pagesNeed To Readdogewow000No ratings yet
- FPGA Acceleration of Image Reconstruction ForDocument8 pagesFPGA Acceleration of Image Reconstruction ForElizabeth EspitiaNo ratings yet
- Bayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaDocument12 pagesBayesian Stochastic Mesh Optimisation For 3D Reconstruction: George Vogiatzis Philip Torr Roberto CipollaneilwuNo ratings yet
- Computational Geometry: Exploring Geometric Insights for Computer VisionFrom EverandComputational Geometry: Exploring Geometric Insights for Computer VisionNo ratings yet
- Computer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionFrom EverandComputer Vision Graph Cuts: Exploring Graph Cuts in Computer VisionNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- Isomeros Del FenalenoDocument5 pagesIsomeros Del Fenalenocharalito123No ratings yet
- Domain 8: - Software Development SecurityDocument3 pagesDomain 8: - Software Development SecurityShpetim MaloNo ratings yet
- Skepticism About TruthDocument3 pagesSkepticism About TruthHoward MokNo ratings yet
- Operator Manual DFEG-K With QSX15 Engine, PCC 2100 PDFDocument81 pagesOperator Manual DFEG-K With QSX15 Engine, PCC 2100 PDFmaurito1986100% (2)
- 4-4 Swarm DLDocument28 pages4-4 Swarm DLAnonymous qrKwdO100% (4)
- Metrology For Smart Electrical GridsDocument34 pagesMetrology For Smart Electrical Gridsjsantodo_2No ratings yet
- PHRASAL VERBS 8oDocument4 pagesPHRASAL VERBS 8oVale OlveraNo ratings yet
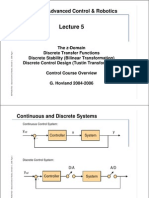
- Adv Control & Robotic Lec 5Document31 pagesAdv Control & Robotic Lec 5key3hseNo ratings yet
- Msunit 2 GraspsDocument6 pagesMsunit 2 Graspsapi-338845804No ratings yet
- Updated NewDocument73 pagesUpdated NewAbhishek GaurNo ratings yet
- Applied Sciences: An End-to-End Deep Learning Image Compression Framework Based On Semantic AnalysisDocument13 pagesApplied Sciences: An End-to-End Deep Learning Image Compression Framework Based On Semantic AnalysisJuan Daniel Garcia VeigaNo ratings yet
- Lesson Strength of PlanetsDocument12 pagesLesson Strength of Planetsshunmugathason100% (1)
- Laminar Heat Transfer Around Blunt Bodies in Dissociated AirDocument10 pagesLaminar Heat Transfer Around Blunt Bodies in Dissociated AirKanishka Lankatillake100% (1)
- Assignment 2 SolutionsDocument9 pagesAssignment 2 Solutionssimma suryanarayanaNo ratings yet
- Home Work Assignment - 1Document4 pagesHome Work Assignment - 1Agnivesh SharmaNo ratings yet
- IA Vector Calculus Lecture Notes 2000 (Cambridge)Document139 pagesIA Vector Calculus Lecture Notes 2000 (Cambridge)ucaptd3No ratings yet
- CPS 104 Computer Organization and Programming Lecture-22: Single Cycle Datapath, ControlDocument36 pagesCPS 104 Computer Organization and Programming Lecture-22: Single Cycle Datapath, ControlprachesNo ratings yet
- Guava Chemistry ProjectDocument12 pagesGuava Chemistry ProjectAdarsh Raj sainiNo ratings yet
- Ph302 Tutorial Sheet 1Document2 pagesPh302 Tutorial Sheet 1Manik MalhotraNo ratings yet
- Practice Final SolutionsDocument41 pagesPractice Final SolutionsHareesha N GNo ratings yet
- Answer Key & Solution Explanation, JEE Advanced Paper - 2 SafaltaDocument24 pagesAnswer Key & Solution Explanation, JEE Advanced Paper - 2 SafaltaHemant KumarNo ratings yet
- Pic16f84a PDFDocument88 pagesPic16f84a PDFBenjamin Michael LandisNo ratings yet
- Astm C 1260 PDFDocument9 pagesAstm C 1260 PDFjorgesilva84No ratings yet
- Primergy Serverview Suite: Integration Module V1.4 For Altiris Deployment ServerDocument56 pagesPrimergy Serverview Suite: Integration Module V1.4 For Altiris Deployment ServerMarcel-Mihail MihaescuNo ratings yet
- Materi 7b Mohr CircleDocument35 pagesMateri 7b Mohr Circle17 / Imada Millatul KNo ratings yet
- Chapter2.Data Pattern and Techniques SelectionDocument77 pagesChapter2.Data Pattern and Techniques SelectionLe HieuNo ratings yet
- NP EX19 CT3c StaciBrunner 2Document7 pagesNP EX19 CT3c StaciBrunner 2বিষাক্ত মানবNo ratings yet