Download as pdf or txt
You might also like
- Cebc Answers PDF FreeDocument5 pagesCebc Answers PDF FreeRoshni Bhandari4100% (3)
- Principles of Naval Architecture Vol III - Motions in Waves and ControllabilityDocument435 pagesPrinciples of Naval Architecture Vol III - Motions in Waves and Controllabilitylynkard82% (11)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- 4700 Ofs - 6610239659Document2 pages4700 Ofs - 6610239659ALEJO100% (1)
- Parametric Finite Element Model of AIRBUS Engine Pylon With MSC - PatranDocument9 pagesParametric Finite Element Model of AIRBUS Engine Pylon With MSC - Patranventus45No ratings yet
- RSA 2015 - Wind - SimulatorDocument16 pagesRSA 2015 - Wind - Simulatorsautier_thomasNo ratings yet
- Q1 - BasicDocument1 pageQ1 - BasicMac KYNo ratings yet
- Kemajou 2019Document18 pagesKemajou 2019madhurjya.gogoiNo ratings yet
- Article MechanismMachineTheory Budinger PDFDocument17 pagesArticle MechanismMachineTheory Budinger PDFfei312chenNo ratings yet
- Design Automation of ShellDocument3 pagesDesign Automation of ShellProSISTEM Consulting (Ionut Michiu)No ratings yet
- Analytical Model of A Bulb FlatDocument8 pagesAnalytical Model of A Bulb FlatKartik DoblekarNo ratings yet
- شبیه سازی 3Document6 pagesشبیه سازی 3muhammadaliNo ratings yet
- A Knowledge-Based Master Modeling Approach To System Analysis and DesignDocument10 pagesA Knowledge-Based Master Modeling Approach To System Analysis and DesignHeribertoNo ratings yet
- Industrialising A Wooden BoatDocument5 pagesIndustrialising A Wooden BoatAmmad AhmadNo ratings yet
- Literature Review On CFD Application For Helical Coil Heat Exchanger DesignDocument5 pagesLiterature Review On CFD Application For Helical Coil Heat Exchanger DesignSantosh SanchetiNo ratings yet
- Engineering Design and Analysis of Nozzle Assembly For Water Sports Training DeviceDocument6 pagesEngineering Design and Analysis of Nozzle Assembly For Water Sports Training DeviceMatt HarrisNo ratings yet
- A Parametric Blade Design System - AndersDocument50 pagesA Parametric Blade Design System - Andersaxeem1No ratings yet
- Combining ExperimentsDocument11 pagesCombining ExperimentssivaenotesNo ratings yet
- Simulation Driven Structural Design in Ship BuildingDocument13 pagesSimulation Driven Structural Design in Ship BuildingAltairEnlightenNo ratings yet
- On Case Studies For Concurrent Engineering Concept in Shipbuilding IndustryDocument16 pagesOn Case Studies For Concurrent Engineering Concept in Shipbuilding IndustryAman BaghelNo ratings yet
- Welcome To International Journal of Engineering Research and Development (IJERD)Document5 pagesWelcome To International Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Estimating Design Effort For The Compressor Design Department: A Case Study at Pratt & Whitney CanadaDocument17 pagesEstimating Design Effort For The Compressor Design Department: A Case Study at Pratt & Whitney CanadaEkin BirolNo ratings yet
- The Application of Multi-Objective Robust Design MDocument14 pagesThe Application of Multi-Objective Robust Design Mardan nagraNo ratings yet
- Design For ProductionDocument8 pagesDesign For ProductiontxjiangNo ratings yet
- 2023 Bagazinski ShipGen PreprintDocument29 pages2023 Bagazinski ShipGen Preprinthoficop838No ratings yet
- Flow Design Preliminary Validation Brief 01072014Document11 pagesFlow Design Preliminary Validation Brief 01072014wheguille100% (1)
- Vectis Undeunderrhood AirflowDocument14 pagesVectis Undeunderrhood AirflowdineshNo ratings yet
- Template-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanDocument10 pagesTemplate-Based Integrated Design: A Case Study: Ali K. Kamrani and Abhay VijayanmurgadeepNo ratings yet
- Design Optimization of Piping Arrangements in Series Ships Based On The Modularization ConceptDocument11 pagesDesign Optimization of Piping Arrangements in Series Ships Based On The Modularization ConceptRAwand17No ratings yet
- Project: Design and Analysis of Shock AbsorberDocument18 pagesProject: Design and Analysis of Shock AbsorberKunal KureelNo ratings yet
- Structure Simulation and Blade Design of An Aircraft EngineDocument12 pagesStructure Simulation and Blade Design of An Aircraft Enginesirajul_musthafaNo ratings yet
- Multirotor Sizing Methodology With Flight Time EstDocument14 pagesMultirotor Sizing Methodology With Flight Time EstLeonardo FrühholzNo ratings yet
- Automated Creation of Aeroelastic Optimization Models From A Parameterized GeometryDocument14 pagesAutomated Creation of Aeroelastic Optimization Models From A Parameterized GeometryFernass DaoudNo ratings yet
- TribonDocument3 pagesTribonSebastianNo ratings yet
- Brief DA5 1314 PDFDocument4 pagesBrief DA5 1314 PDFJohn westNo ratings yet
- Product Design and Concurrent Engineerin UNIT 1Document22 pagesProduct Design and Concurrent Engineerin UNIT 1Nabila RasgadoNo ratings yet
- A Tool For Analysis of Costs On The Manufacturing of The HullDocument7 pagesA Tool For Analysis of Costs On The Manufacturing of The HullCleber001No ratings yet
- Guerrero Vela ETSIDocument11 pagesGuerrero Vela ETSIKarthik KrNo ratings yet
- Research Paper On Wind TunnelDocument8 pagesResearch Paper On Wind Tunnelafmchbghz100% (1)
- Parametric Generation of Yacht HullsDocument123 pagesParametric Generation of Yacht Hullsdimco2007100% (1)
- Model Based Systems Engineering For Aircraft Systems - How DoesDocument9 pagesModel Based Systems Engineering For Aircraft Systems - How DoesAlmas QasimNo ratings yet
- Condition Assessmnt Scheme For Ship Hull MaintenanceDocument22 pagesCondition Assessmnt Scheme For Ship Hull MaintenanceAnilKumar100% (1)
- Computer-Aided Casting Design and Simulation PDFDocument9 pagesComputer-Aided Casting Design and Simulation PDFmonish KrishnaNo ratings yet
- IJCIM OriginalDocument16 pagesIJCIM OriginalPutri Fajar PuspitaNo ratings yet
- Case Studies in Structural Design and OptimizationDocument12 pagesCase Studies in Structural Design and OptimizationAhly1970No ratings yet
- Conceptual Ship Design Framework For Designing New Commercial ShipsDocument8 pagesConceptual Ship Design Framework For Designing New Commercial ShipsAhmed AdelNo ratings yet
- WA2 3 HollenbachDocument9 pagesWA2 3 HollenbachMANIU RADU-GEORGIANNo ratings yet
- Thesis Project ReportDocument6 pagesThesis Project Reportmelissahewittpalmbay100% (2)
- JWC PDFDocument8 pagesJWC PDFJH_ProjectNo ratings yet
- Simulation 1Document4 pagesSimulation 1rodolfoNo ratings yet
- FulltextDocument129 pagesFulltextCecil VictorNo ratings yet
- Efficient Design of Outfitting & Machinery Spaces: R. de Góngora, SENER, Ingenieria y Sistemas S.A., SpainDocument7 pagesEfficient Design of Outfitting & Machinery Spaces: R. de Góngora, SENER, Ingenieria y Sistemas S.A., SpainRAwand17No ratings yet
- Siemens SW Simulation Driven Ship Design White PaperDocument12 pagesSiemens SW Simulation Driven Ship Design White PaperTip's kNo ratings yet
- SPE-10709 Physics Based Well Design - Beyond The Learning CurveDocument5 pagesSPE-10709 Physics Based Well Design - Beyond The Learning Curvedrilling moneytreeNo ratings yet
- Structural Analysis of Micro Turbine by Using CFD Dr.R.Rajappan, K ChandrasekarDocument8 pagesStructural Analysis of Micro Turbine by Using CFD Dr.R.Rajappan, K ChandrasekarSaad Al HelyNo ratings yet
- FPSO Hull Structural Design Concept Supporting Controlled Project ExecutionDocument8 pagesFPSO Hull Structural Design Concept Supporting Controlled Project ExecutionihllhmNo ratings yet
- Application of Cad in RP TechnologyffDocument13 pagesApplication of Cad in RP TechnologyffPushkar FegadeNo ratings yet
- 9AKK106103A3447-ABB-817-WPO - How Evolving Design Tools and Specifications Impact Transformer Longevity - FINALDocument8 pages9AKK106103A3447-ABB-817-WPO - How Evolving Design Tools and Specifications Impact Transformer Longevity - FINALViviane CalixtoNo ratings yet
- Handbook of Optimization in the Railway IndustryFrom EverandHandbook of Optimization in the Railway IndustryRalf BorndörferNo ratings yet
- Integration of Demand Response into the Electricity Chain: Challenges, Opportunities, and Smart Grid SolutionsFrom EverandIntegration of Demand Response into the Electricity Chain: Challenges, Opportunities, and Smart Grid SolutionsNo ratings yet
- Static Analysis of Software: The Abstract InterpretationFrom EverandStatic Analysis of Software: The Abstract InterpretationNo ratings yet
- A Rational Approach For The Evaluation of Fatigue Strength of Fpso StructuresDocument7 pagesA Rational Approach For The Evaluation of Fatigue Strength of Fpso StructuresSarath Babu SNo ratings yet
- Mesh Refinement Via Volume Controls I. OverviewDocument1 pageMesh Refinement Via Volume Controls I. OverviewSarath Babu SNo ratings yet
- Rudder DesignDocument5 pagesRudder DesignSarath Babu SNo ratings yet
- SVENDBORG MÆRSK Marine Accident ReportDocument28 pagesSVENDBORG MÆRSK Marine Accident ReportSarath Babu SNo ratings yet
- Y+ CFD PDFDocument6 pagesY+ CFD PDFSarath Babu SNo ratings yet
- Effects of Coating Roughness and Biofouling On Ship Resistance and PoweringDocument12 pagesEffects of Coating Roughness and Biofouling On Ship Resistance and PoweringSarath Babu SNo ratings yet
- CFD Potential Flow and System-Based SimuDocument54 pagesCFD Potential Flow and System-Based SimuSarath Babu SNo ratings yet
- Assessment of Parametric RollDocument70 pagesAssessment of Parametric RollSarath Babu S100% (1)
- Measurement of Boat SpeedDocument12 pagesMeasurement of Boat SpeedSarath Babu SNo ratings yet
- Definition of Shipping TermsDocument1 pageDefinition of Shipping TermsSarath Babu SNo ratings yet
- Fredyn PDFDocument2 pagesFredyn PDFSarath Babu SNo ratings yet
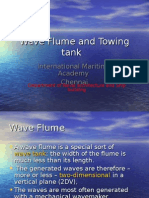
- Wave Flume and Towing TankDocument15 pagesWave Flume and Towing TankSarath Babu SNo ratings yet
- Adel 1: Vessel DetailsDocument2 pagesAdel 1: Vessel DetailsSarath Babu SNo ratings yet
- Vessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankerDocument37 pagesVessel Details: 9449546 565 743000 9VCL3 Oil/Chemical TankerSarath Babu SNo ratings yet
- Ansys Training Book.Document15 pagesAnsys Training Book.Sarath Babu SNo ratings yet
- Bahuda: Vessel DetailsDocument2 pagesBahuda: Vessel DetailsSarath Babu SNo ratings yet
- IMU Placement Brochure-2013-2014Document68 pagesIMU Placement Brochure-2013-2014Sarath Babu SNo ratings yet
- Design of Offshore StructuresDocument11 pagesDesign of Offshore StructuresInayath Hussain100% (1)
- Mindray Solutions CatalogueDocument15 pagesMindray Solutions CatalogueViniak S. Tertullien MONTCHONo ratings yet
- EC100Document2 pagesEC100Esfan GaripNo ratings yet
- Assignment SheetDocument5 pagesAssignment SheetArtoria RenNo ratings yet
- 5E LP - Mixture (Year 2) Group 4C2 UpdateDocument8 pages5E LP - Mixture (Year 2) Group 4C2 UpdatecancalokNo ratings yet
- Características Dimensiones HofstedeDocument9 pagesCaracterísticas Dimensiones HofstedeJaz WoolridgeNo ratings yet
- Introduction To Marketing - MCQsDocument27 pagesIntroduction To Marketing - MCQsMaxwell;100% (1)
- ActivityDocument2 pagesActivityTunWin NaingNo ratings yet
- Animation ProjectDocument10 pagesAnimation Projectapi-463943503No ratings yet
- SAP SD - CertifiedDocument3 pagesSAP SD - Certifiedamit25feb.guptaNo ratings yet
- New Decorative: PaintsDocument56 pagesNew Decorative: PaintsBassam FouadNo ratings yet
- Sika Plast 257Document3 pagesSika Plast 257HasithaNo ratings yet
- BARTON Protein Denaturation and Tertiary StructureDocument2 pagesBARTON Protein Denaturation and Tertiary StructureIna de La FuenteNo ratings yet
- Article 1496471672Document6 pagesArticle 1496471672Irene KeniaNo ratings yet
- Bro Miras RsuDocument4 pagesBro Miras RsuazzszoNo ratings yet
- Password 3Document1 pagePassword 3Muhammad Rana FarhanNo ratings yet
- Jingjing XIA: EducationDocument3 pagesJingjing XIA: EducationRaviNo ratings yet
- Carter's CoefficientDocument3 pagesCarter's CoefficientjalilemadiNo ratings yet
- IGCSE Computer by Inqilab Patel-Paper 2 PDFDocument208 pagesIGCSE Computer by Inqilab Patel-Paper 2 PDFJawad hossainNo ratings yet
- Math Majorship 1Document13 pagesMath Majorship 1Charl Niño CutamoraNo ratings yet
- Mri AssignmentDocument3 pagesMri AssignmentaparjotNo ratings yet
- Age of Empires IIIDocument2 pagesAge of Empires IIIRamon_sjcNo ratings yet
- Excerpt From Low-Code/No-Code: Citizen Developers and The Surprising Future of Business ApplicationsDocument20 pagesExcerpt From Low-Code/No-Code: Citizen Developers and The Surprising Future of Business ApplicationsPhil SimonNo ratings yet
- Arikamedu: Chaitanya .V. Parte T.Y.B.A-285 Semester V Paper V - Introduction of ArchaeologyDocument22 pagesArikamedu: Chaitanya .V. Parte T.Y.B.A-285 Semester V Paper V - Introduction of ArchaeologyCRAZY GAMING100% (1)
- Curriculum Vitae: Maneela BajpaiDocument3 pagesCurriculum Vitae: Maneela Bajpaimaneela bajpaiNo ratings yet
- Experience With An IT Asset Management SystemDocument23 pagesExperience With An IT Asset Management SystemCA Ghanathe RamakrishnaNo ratings yet
- D493027 en PDFDocument39 pagesD493027 en PDFJose ValenciaNo ratings yet
- Detallado Por Ejecutivo Clientes Medianamente SatisfechosDocument335 pagesDetallado Por Ejecutivo Clientes Medianamente SatisfechosLeonardo Toro CastroNo ratings yet